1.本发明涉及测量真空断路器的触头磨损程度技术领域,特别是涉及一种测量真空断路器的触头磨损程度的方法及装置。
背景技术:
2.电器智能化是现代电器设备的发展趋势,是传统电器科学、现代电子技术、电力电子技术、微机控制技术、现代传感器技术、数字通信及计算机网络技术等多门类学科交叉和融合的结果;而对电器设备实时运行状况的有效掌握是实现电器设备智能化、实现设备的全生命周期管理的基础。
3.真空灭弧室是真空断路器的关键部件,真空灭弧室触头的磨损状况直接关系着真空断路器的性能,通过掌握灭弧室触头状况可以及时消除断路器可能出现的故障隐患。
4.目前真空断路器的在运行过程基本无法掌握触头磨损情况,只能被动等发生问题或检修时测量。实时掌握真空断路器触头磨损程度,对掌握断路器的运行状况,提高设备的管理水平意义重大。
技术实现要素:
5.本发明的目的在于,提出一种测量真空断路器的触头磨损程度的方法及装置,解决现有真空断路器的在运行过程基本无法掌握触头磨损情况,只能被动等发生问题或检修时测量的技术问题。
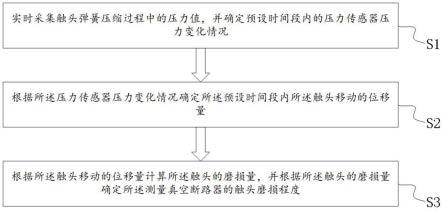
6.一方面,提供一种测量真空断路器的触头磨损程度的方法,包括:
7.实时采集触头弹簧压缩过程中的压力值,并确定预设时间段内的压力传感器压力变化情况;
8.根据所述压力传感器压力变化情况确定所述预设时间段内所述触头移动的位移量;
9.根据所述触头移动的位移量计算所述触头的磨损量,并根据所述触头的磨损量确定所述测量真空断路器的触头磨损程度。
10.优选地,所述确定预设时间段内的压力传感器压力变化情况,具体包括:
11.以断路器合闸的时间点为起始时间点,测得触头弹簧压缩过程中的压力值;
12.记录触头弹簧压力值随时间变化的数值,直到所述预设时间段结束时间点为止,得到触头弹簧压力与时间的函数关系,输出为预设时间段内的压力传感器压力变化情况。
13.优选地,所述根据所述压力传感器压力变化情况确定所述预设时间段内所述触头移动的位移量,具体包括:
14.根据所述触头弹簧压力与时间的函数关系确定所述触头的加速度与时间的函数关系;
15.根据所述触头的加速度与时间的函数关系确定所述触头的速度与时间的函数关系;
16.根据所述触头的速度与时间的函数关系确定触头位移与时间的函数关系;
17.根据触头位移与时间的函数关系,计算以所述起始时间点开始至所述预设时间段结束时间点为止的所述触头移动的位移量。
18.优选地,根据以下公式确定所述触头的加速度与时间的函数关系:
[0019][0020]
其中,a(t)表示t时刻的加速度,f(t)表示t时刻的触头弹簧压力,m表示质量。
[0021]
优选地,根据以下公式确定所述触头的速度与时间的函数关系:
[0022]
v(t)=∫a(t)dt c1[0023]
其中,v(t)表示t时刻的速度,a(t)表示t时刻的加速度,dt表示t阶的积分,d表示积分,c1表示积分常数。
[0024]
优选地,根据以下公式确定触头位移与时间的函数关系:
[0025]
s2(t)=∫v(t)dt c2[0026]
其中,s2(t)表示t时刻的触头位移,v(t)表示t时刻的速度,dt表示表示t阶的积分,d表示积分,c2表示积分常数。
[0027]
优选地,根据以下公式计算所述触头的磨损量:
[0028]
l=s
*-s2[0029]
其中,l表示触头的磨损量,s
*
表示断路器初次使用时的超程值,s2表示以所述起始时间点开始至所述预设时间段结束时间点为止的所述触头移动的位移量。
[0030]
优选地,所述根据所述触头的磨损量确定所述测量真空断路器的触头磨损程度,具体包括:
[0031]
将所述触头的磨损量与预设的磨损标准范围值进行比较;
[0032]
当所述触头的磨损量处于所述预设的磨损标准范围值内时,判定所述触头的磨损不严重,不需要更换;
[0033]
当所述触头的磨损量超出所述预设的磨损标准范围值时,判定所述触头的磨损严重,需要更换。
[0034]
另一方面,还提供一种测量真空断路器的触头磨损程度的装置,用以实现所述测量真空断路器的触头磨损程度的方法,包括:
[0035]
压力检测模块,用以实时采集触头弹簧压缩过程中的压力值,并确定预设时间段内的压力传感器压力变化情况;
[0036]
磨损量计算模块,用以根据所述压力传感器压力变化情况确定所述预设时间段内所述触头移动的位移量;并,根据所述触头移动的位移量计算所述触头的磨损量,根据所述触头的磨损量确定所述测量真空断路器的触头磨损程度。
[0037]
优选地,还包括:
[0038]
触头更换模块,用以将所述触头的磨损量与预设的磨损标准范围值进行比较;
[0039]
当所述触头的磨损量处于所述预设的磨损标准范围值内时,判定所述触头的磨损不严重,不需要更换;
[0040]
当所述触头的磨损量超出所述预设的磨损标准范围值时,判定所述触头的磨损严重,需要更换。
[0041]
综上,实施本发明的实施例,具有如下的有益效果:
[0042]
本发明提供的测量真空断路器的触头磨损程度的方法及装置,通过在断路器的运动机构与触头弹簧之间增设压力传感器,通过压力传感器获得触头弹簧压力值f随时间变化的规律,进而间接获得触头磨损量,进而判断触头是否需要更换,可以实时监控触头的状态,避免了断路器因触头问题发生故障,大大降低了断路器故障率。
附图说明
[0043]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本发明的范畴。
[0044]
图1为背景技术中现有断路器的示意图。
[0045]
图2为本发明实施例中一种测量真空断路器的触头磨损程度的方法的主流程示意图。
[0046]
图3为本发明实施例中一种测量真空断路器的触头磨损程度的装置的示意图。
具体实施方式
[0047]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
[0048]
如图1所示,现有断路器包括静触头1、动触头2、驱动动触头2动作的运动机构5,运动机构5与动触头2之间连接有触头弹簧3,本发明的改进点为:在触头弹簧3和运动机构5之间连接有压力传感器4,压力传感器4与计算机连接。
[0049]
当断路器接收到合闸命令后,运动机构5开始向上运动,同时压力传感器4、触头弹簧3以及动触头2一同向上运动;当动触头2与静触头1接触后,触头弹簧3开始压缩,压力传感器4的压力值f开始变化,此时运动机构5的位移为s1,即为断路器的开距;接着运动机构5继续向上,触头弹簧3继续被压缩,当运动机构5运动到预设的位置后,停止运动,此时触头弹簧3不再被压缩,运动机构5在触头弹簧3开始被压缩到停止所产生的位移为s2,即为断路器的超程;运动机构5从接收命令开始运动到完全停止,所运动的位移为s,即为断路器的行程。
[0050]
如图2所示,为本发明提供的一种测量真空断路器的触头磨损程度的方法的一个实施例的示意图。在该实施例中,所述方法包括以下步骤:
[0051]
实时采集触头弹簧压缩过程中的压力值,并确定预设时间段内的压力传感器压力变化情况;也就是,断路器合闸时,通过连接在断路器的运动机构5与触头弹簧3之间的压力传感器4测得触头弹簧3压缩过程中的压力值f、并将测得的数据输出。
[0052]
具体实施例中,以断路器合闸的时间点为起始时间点,测得触头弹簧压缩过程中的压力值;记录触头弹簧压力值随时间变化的数值,直到所述预设时间段结束时间点为止,得到触头弹簧压力与时间的函数关系,输出为预设时间段内的压力传感器压力变化情况。也就是,记录触头弹簧3压力值f随时间变化的规律,得到触头弹簧3压力值f与时间t的函数关系f(t)。
[0053]
进一步的,根据所述压力传感器压力变化情况确定所述预设时间段内所述触头移动的位移量;也就是,记录压力传感器压力变化的开始到终止时间t1,即可得到在这个压力变化的时间t1范围内动触头所走过的位移s,即为开关的超程s2。
[0054]
具体实施例中,确定开关的超程时,需要根据所述触头弹簧压力与时间的函数关系确定所述触头的加速度与时间的函数关系;具体地,根据以下公式确定所述触头的加速度与时间的函数关系:
[0055][0056]
其中,a(t)表示t时刻的加速度,f(t)表示t时刻的触头弹簧压力,m表示质量。可理解的,该过程就是根据牛顿第二定律f=ma,可得到加速度a与时间t的函数关系。
[0057]
根据所述触头的加速度与时间的函数关系确定所述触头的速度与时间的函数关系;具体地,根据以下公式确定所述触头的速度与时间的函数关系:
[0058]
v(t)=∫a(t)dt c1[0059]
其中,v(t)表示t时刻的速度,a(t)表示t时刻的加速度,dt表示t阶的积分,d表示积分,c1表示积分常数。可理解的是,通过对加速度a做积分可得到断路器速度v与时间t的函数关系。
[0060]
根据所述触头的速度与时间的函数关系确定触头位移与时间的函数关系;具体地,根据以下公式确定触头位移与时间的函数关系:
[0061]
s2(t)=∫v(t)dt c2[0062]
其中,s2(t)表示t时刻的触头位移,v(t)表示t时刻的速度,dt表示表示t阶的积分,d表示积分,c2表示积分常数。可理解的,通过对速度v的函数做积分则可得到位移s与时间t的函数关系。
[0063]
根据触头位移与时间的函数关系,计算以所述起始时间点开始至所述预设时间段结束时间点为止的所述触头移动的位移量。可理解的,记录压力传感器压力变化的开始到终止时间t1,即可得到在这个压力变化的时间t1范围内动触头所走过的位移s。
[0064]
进一步的,根据所述触头移动的位移量计算所述触头的磨损量,并根据所述触头的磨损量确定所述测量真空断路器的触头磨损程度。
[0065]
具体地,根据以下公式计算所述触头的磨损量:
[0066]
l=s
*-s2[0067]
其中,l表示触头的磨损量,s
*
表示断路器初次使用时的超程值,s2表示以所述起始时间点开始至所述预设时间段结束时间点为止的所述触头移动的位移量。
[0068]
再具体地,还包括:将所述触头的磨损量与预设的磨损标准范围值进行比较;当所述触头的磨损量处于所述预设的磨损标准范围值内时,判定所述触头的磨损不严重,不需要更换;当所述触头的磨损量超出所述预设的磨损标准范围值时,判定所述触头的磨损严重,需要更换。也就是,获得触头磨损量,进而判断触头是否需要更换,可以实时监控触头的状态。
[0069]
如图3所示,为本发明还提供的一种测量真空断路器的触头磨损程度的装置的一个实施例的示意图。在该实施例中,所述装置包括:
[0070]
压力检测模块,用以实时采集触头弹簧压缩过程中的压力值,并确定预设时间段
内的压力传感器压力变化情况;
[0071]
磨损量计算模块,用以根据所述压力传感器压力变化情况确定所述预设时间段内所述触头移动的位移量;并,根据所述触头移动的位移量计算所述触头的磨损量,根据所述触头的磨损量确定所述测量真空断路器的触头磨损程度。
[0072]
本实施例中,还包括:
[0073]
触头更换模块,用以将所述触头的磨损量与预设的磨损标准范围值进行比较;
[0074]
当所述触头的磨损量处于所述预设的磨损标准范围值内时,判定所述触头的磨损不严重,不需要更换;
[0075]
当所述触头的磨损量超出所述预设的磨损标准范围值时,判定所述触头的磨损严重,需要更换。
[0076]
需说明的是,上述实施例所述系统与上述实施例所述方法对应,因此,上述实施例所述系统未详述部分可以参阅上述实施例所述方法的内容得到,此处不再赘述。
[0077]
综上,实施本发明的实施例,具有如下的有益效果:
[0078]
本发明提供的测量真空断路器的触头磨损程度的方法及装置,通过在断路器的运动机构与触头弹簧之间增设压力传感器,通过压力传感器获得触头弹簧压力值f随时间变化的规律,进而间接获得触头磨损量,进而判断触头是否需要更换,可以实时监控触头的状态,避免了断路器因触头问题发生故障,大大降低了断路器故障率。
[0079]
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。