1.本技术涉及摄像模组领域,更具体地涉及一种具有光学防抖功能的摄像模组,其中,所述摄像模组在其成像路径上设有防抖光学组件,所述防抖光学组件适于改变成像光线的传播路径以进行光学防抖。特别地,所述摄像模组采用新型的压电致动器作为驱动器来满足所述防抖光学组件的作动要求。并且,采用合理的布设方案将所述压电致动器布设于所述摄像模组内,以进一步满足所述摄像模组的结构和尺寸要求。
背景技术:
2.随着移动电子设备的普及,被用于移动电子设备的用于帮助使用者获取影像(例如,视频或者图像)的摄像模组的相关技术得到了迅猛的发展和进步,并且在近年来,摄像模组在诸如医疗、安防、工业生产等诸多的领域都得到了广泛的应用。
3.移动电子设备上配置的摄像模组会搭载自动对焦、光学变焦等功能,近年来为了优化摄像性能(尤其是摄像的稳定性),还要求摄像模组具有光学防抖功能。光学防抖是补偿当正在捕捉图像是由用户的手移动或移动电子设备的本体振动导致的图像模糊的技术。通常,移动电子设备中还会装配多个位置传感器(例如,角速度传感器)来检测移动电子设备的振动以根据检测到的振动的角速度和方向来移动摄像模组的预设光学部件(例如,感光芯片、光学镜头等)来实现防抖。
4.为了满足越来越广泛的市场需求,高像素、大芯片、小尺寸是现有摄像模组不可逆转的发展趋势。随着感光芯片朝着高像素和大芯片的方向发展,与感光芯片适配的光学部件的尺寸和重量也逐渐增大,这给用于驱动光学部件以进行光学防抖的驱动器带来的新的挑战。
5.具体地,现有的用于驱动光学部件的驱动器为电磁式马达,例如,音圈马达(voice coil motor:vcm)、形状记忆合金驱动器(shape of memory alloy actuator:sma)等。然而,随着光学部件的尺寸增加而导致的重量增加,现有的电磁式马达已逐渐无法提供足够的驱动力来驱动光学部件移动。量化来看,现有的音圈马达和形状记忆合金驱动器仅适于驱动重量小于100mg的光学部件,也就是,如果光学部件的重量超过100mg,现有的驱动器将无法满足摄像模组的应用需求。此外,现有的电磁式致动器还存在电磁干扰的问题。
6.因此,需要一种适配的用于摄像模组实现光学防抖的新型驱动方案。
技术实现要素:
7.本技术的一优势在于提供了一种摄像模组,其中,所述摄像模组采用新型的压电致动器作为驱动元件以不仅能够提供足够大的驱动力,而且,能够提供精度更高和行程更长的驱动性能,以满足所述摄像模组的光学防抖的驱动要求。
8.通过下面的描述,本技术的其它优势和特征将会变得显而易见,并可以通过权利要求书中特别指出的手段和组合得到实现。
9.为实现上述至少一优势,本技术提供一种摄像模组,其包括:
10.防抖光学组件,包括光转折元件和被保持于所述光转折元件的光转折路径的第一光校正元件和第二光校正元件,其中,所述光转折元件被配置为接收来自外界的成像光线并对该成像光线进行转折;
11.被保持于所述防抖光学组件的通光路径的透镜组,其中,所述透镜组设有一光轴,所述第一光校正元件和所述第二光校正元件以所述光轴为轴被同轴地设置;
12.被保持于所述透镜组的通光路径的感光组件;以及
13.驱动组件,包括:第一驱动元件和第二驱动元件,所述第一驱动元件和所述第二驱动元件被实施为压电致动器,其中,所述第一驱动元件被配置为驱动所述第一光校正元件绕着所述光轴旋转,所述第二驱动元件被配置为驱动所述第二光校正元件绕着所述光轴旋转,通过这样的方式,使得所述第一光校正元件和所述第二光校正元件之间的相对位置关系可调整以改变该成像光线的传播路径来进行光学防抖。
14.在根据本技术的摄像模组中,所述第一光校正元件和所述第二光校正元件被实施为楔形光学透镜,所述楔形光学透镜具有相对的竖直光学面和倾斜光学面,其中,所述第一光校正元件的倾斜光学面和所述第二光校正元件的光学倾斜面相对地设置。
15.在根据本技术的摄像模组中,所述第一驱动元件被配置为驱动所述第一光校正元件绕着所述光轴以第一方向旋转,所述第二驱动元件被配置为驱动所述第二光校正元件绕着所述光轴以第二方向旋转,所述第一方向与所述第二方向相反,通过这样的方式,使得所述防抖光学组件的所述光转折元件、所述第一光校正元件和所述第二光校正元件满足如下位置关系:
16.|2np
×
θw
×
sinθr|≥|90-θp|
17.其中,np为所述光转折元件的折射率,θp为第一夹角的角度值,θw为第二夹角的角度值,θr所述第一光校正元件的对称轴与所述第二光校正元件的对称轴之间所成夹角的二分之一,其中,所述第一夹角为所述光转折元件的出光面与所述光轴之间所成的夹角,所述第二夹角为所述第一光校正元件或所述第二光校正元件的光倾斜面与所述光轴之间所成的夹角。
18.在根据本技术的摄像模组中,所述第一驱动元件具有第一通光孔,所述第二驱动元件具有第二通光孔,其中,所述第一驱动元件被安装于所述第一光校正元件的竖直光学面的边缘区域,通过这样的安装位置使得来自所述光转折元件的成像光线能够藉由所述第一驱动元件的第一通光孔透过所述第一光校正元件;所述第二驱动元件被安装于所述第二光校正元件的竖直光学面的边缘区域,通过这样的安装位置使得从所述第二光校正元件的倾斜光学面进入所述第二光校正元件的成像光线能够藉由所述第二驱动元件的第二通光孔透出。
19.在根据本技术的摄像模组中,所述压电致动器具有环形结构。
20.在根据本技术的摄像模组中,所述第一光校正元件具有凹陷地形成于其竖直光学面的边缘区域的第一安装槽,所述第一驱动元件以被安装于所述第一安装槽的方式被安装于所述第一光校正元件的竖直光学面的边缘区域;所述第二光校正元件具有凹陷地形成于其竖直光学面的边缘区域的第二安装槽,所述第二驱动元件以被安装于所述第二安装槽的方式被安装于所述第二光校正元件的竖直光学面的边缘区域。
21.在根据本技术的摄像模组中,所述第一驱动元件通过黏着剂被附着于所述第一安
装槽的底表面,所述第二驱动元件通过黏着剂被附着于所述第二安装槽的底表面。
22.在根据本技术的摄像模组中,所述压电致动器包括环形压电结构和电连接于所述环形压电结构的驱动电路系统,其中,所述环形压电结构在所述驱动电路系统的控制下发生波状形状以产生用于旋转所述第一光校正元件或所述第二光校正元件的驱动力。
23.在根据本技术的摄像模组中,所述环形压电结构包括:第一压电结构、第二压电结构以及延伸于所述第一压电结构和所述第二压电结构之间的第一间隔区和第二间隔区,其中,所述第一间隔区和所述第二间隔区被接地。
24.在根据本技术的摄像模组中,所述第一压电结构和所述第二压电结构具有c型结构。
25.在根据本技术的摄像模组中,所述第一压电结构包括多组相互交替的第一压电段和第二压电段,所述第一压电段和所述第二压电段具有相反的极化方向;所述第二压电结构包括多组相互交替的第三压电段和第四压电段,所述第三压电段和所述第四压电段具有相反的极化方向。
26.在根据本技术的摄像模组中,所述第一光校正元件和所述第二光校正元件被实施为圆柱形光学透镜,所述圆柱形光学透镜具有第一光学面和第二光学面,其中,所述圆柱形光学透镜包括形成于其第二光学面的多个微结构,每个所述微结构具有倾斜光学面。
27.通过对随后的描述和附图的理解,本技术进一步的目的和优势将得以充分体现。
28.本技术的这些和其它目的、特点和优势,通过下述的详细说明,附图和权利要求得以充分体现。
附图说明
29.通过结合附图对本技术实施例进行更详细的描述,本技术的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与本技术实施例一起用于解释本技术,并不构成对本技术的限制。在附图中,相同的参考标号通常代表相同部件或步骤。
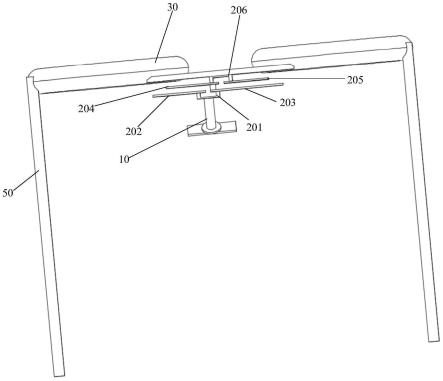
30.图1图示了根据本技术实施例的摄像模组的示意图。
31.图2图示了根据本技术实施例的所述摄像模组的防抖光学组件中光校正元件的立体示意图。
32.图3图示了根据本技术实施例的所述摄像模组的所述光校正元件旋转之后的光路示意图。
33.图4图示了根据本技术实施例的所述摄像模组的第一光校正元件和第二光校正元件相对旋转时的旋转方向示意图。
34.图5图示了根据本技术实施例的所述压电致动器的示意图。
35.图6图示了根据本技术实施例的所述光校正元件的一个变形实施的示意图。
具体实施方式
36.下面,将参考附图详细地描述根据本技术的示例实施例。显然,所描述的实施例仅仅是本技术的一部分实施例,而不是本技术的全部实施例,应理解,本技术不受这里描述的示例实施例的限制。
37.示例性摄像模组
38.图1图示了根据本技术实施例的所述摄像模组的示意图,其中,所述摄像模组在其成像路径上设有防抖光学组件10,所述防抖光学组件10适于改变成像光线的传播路径以进行光学防抖。
39.如图1所示,根据本技术实施例的所述摄像模组,包括:防抖光学组件10、被保持于所述防抖光学组件10的通光路径上的透镜组20、被保持于所述透镜组20的通光路径的感光组件30,以及,用于驱动所述防抖光学组件10的至少一部分以进行光学防抖的驱动组件40,其中,所述透镜组20设有一光轴。
40.相应地,在该实施例中,所述防抖光学组件10包括光转折元件11和被保持于所述光转折元件11的光转折路径的至少二光校正元件,其中,所述光转折元件11被配置为接收来自外界的成像光线并对该成像光线进行转折。如图1所示,在该实施例中,所述光转折元件11被实施为光转折棱镜,其具有光入射面、光出射面和光反射面,其中,来自外界的成像光线从所述光入射面进入所述光转折元件11并在所述光反射面处发生近90
°
的转折并从所述光出射面透出所述光转折元件11。这里,考虑到制造公差,在实际工作过程中,所述光转折元件11对成像光线进行转折的角度可能存在1
°
以内的误差,对此,本领域普通技术人员应可以理解。
41.在一个具体的示例中,所述防抖光学组件10进一步包括安装载体13,所述光转折元件11以其光转折面通过黏着剂附着于所述安装载体13的支撑面的方式被安装于所述安装载体13,这样可有效地防止所述光转折元件11相对于所述安装载体13之间的滑动或移动,以确保所述光转折元件11的安装位置的稳定性。
42.特别地,在该实施例中,所述光转折元件11具有特殊的位置配置以满足所述防抖光学组件10的需求,具体地,所述光转折元件11的光入射面与所述光轴平行,所述光出射面与所述光轴之间具有第一夹角,所述光出射面与所述光入射面之间的夹角等于所述第一夹角的角度值。
43.值得一提的是,在本技术其他示例中,所述光转折元件11还可以被实施为其他类型的光学元件,例如反射镜,对此,并不为本技术所局限。并且,在本技术实施例中,所述摄像模组还可以包括更多数量的光转折元件11,其一个原因在于:引入所述光转折元件11的一个作用为:对成像光线进行转折,以对具有较长光学总长(ttl:total track length)的所述摄像模组的光学系统能够进行结构维度上的折叠。相应地,当所述摄像模组的光学总长(ttl)过长时,可设置更多数量的光转折元件11,以满足所述摄像模组的尺寸要求,例如可以设置所述光转折元件11于所述摄像模组的像侧或者所述透镜组20中任意两个透镜之间。
44.进一步地,为了实现光学防抖的需求,所述防抖光学组件10进一步包括至少二光校正元件,其中,所述至少二光校正元件形成成像校正元件。在该实施例中,以所述成像校正元件包含2片光校正元件为示例,即,所述成像校正元件包括第一光校正元件12和第二光校正元件14。应可以理解,在本技术其他示例中,所述成像校正单元还可以包括更多数量的光校正元件,对此,并不为本技术所局限。
45.进一步地,如图1和图2所示,在该实施例中,所述第一光校正元件12和所述第二光校正元件14被实施为楔形光学透镜,其中,所述第一光校正元件12和所述第二光校正元件
14在其相对的第一边缘处和第二边缘处分别具有一最小厚度尺寸和一最大厚度尺寸,所述第一边缘处于所述第二边缘处之间的连线形成所述第一光校正元件12和所述第二光校正元件14的对称轴,并且,所述第一光校正元件12和所述第二光校正元件14的厚度尺寸沿着其各自的对称轴自最小厚度尺寸渐变至最大厚度尺寸。
46.并且,所述第一光校正元件12和所述第二光校正元件14分别具有相对的竖直光学面和倾斜光学面,其中,所述第一光校正元件12的倾斜光学面和所述第二光校正元件14的光学倾斜面相对地设置。特别地,在该实施例中,所述第一光校正元件12的竖直光学面朝向所述光转折元件11,所述第一光校正元件12的光学倾斜面朝向所述第二光校正元件14的光学倾斜面,且所述第二光校正元件14的竖直光学面朝向所述透镜组20。
47.特别地,在该实施例中,所述第一光校正元件12与所述第二光校正元件14皆能在所述驱动组件40的作用下相对于所述光轴进行旋转,以达成光学抖动补偿的功能。以下将搭配图3,针对所述第一光校正元件12和所述第二光校正元件14相对于所述透镜组20和所述光转折元件11旋转时校正过程进行进一步地解说。
48.如图3所示,当所述光校正元件相对于所述光轴旋转一角度时,可使通过所述光校正元件的光束l入射至成像面is的成像位置发生变化,而从第一位置p1移动至第二位置p2。进一步而言,在本实施例中,所述第一光校正元件12与第二光校正元件14相对于所述光轴旋转的旋转方向彼此相反。举例而言,如图4所示,从所述第一光校正元件12和所述第二光校正元件14往成像面is的方向观看时,所述第一光校正元件12的旋转方向为逆时针方向,而第二光校正元件14的方向为顺时针方向。如此,通过能够相对于所述光轴旋转的所述第一光校正元件12和所述第二光校正元件14的配置,所述所述成像校正元件就达成光学抖动补偿的功能,进而具有低耗电以及高效能的优点。
49.进一步地,在该实施例中,所述防抖光学组件10的所述光转折元件11、所述第一光校正元件12和所述第二光校正元件14满足如下位置关系:
50.|2np
×
θw
×
sinθr|≥|90-θp|
51.其中,np为所述光转折元件11的折射率,θp为第一夹角的角度值,θw为第二夹角的角度值,θr所述第一光校正元件12的对称轴与所述第二光校正元件14的对称轴之间所成夹角的二分之一,其中,所述第一夹角为所述光转折元件11的出光面与所述光轴之间所成的夹角,所述第二夹角为所述第一光校正元件12或所述第二光校正元件14的光倾斜面与所述光轴之间所成的夹角。
52.进一步地,如图1和图2所示,在该实施例中,所述透镜组20对应于所述成像校正元件,其包括至少一光学透镜。本领域普通技术人员应知晓,所述透镜组20的解像力在一定范围内与光学透镜的数量成正比,也就是,解像力越高,所述光学透镜的数量越多。在一些实施例中,所述透镜组20还包括用于收容所述至少一光学透镜于其内的镜筒。并且,所述透镜组20可被实施为一体式镜头,或者,分体式镜头,其中,当所述透镜组20被实施为一体式镜头时,所述透镜组20包含一个镜筒,所有的所述光学透镜被安装于所述镜筒内;而当所述透镜组20被实施为分体式光学镜头,所述透镜组20由至少两部分镜头单体组装而成。
53.如图1和图2所示,在本技术实施例中,所述感光组件30对应于所述透镜组20,用于接收来自所述透镜组20的成像光线并进行成像,其中,所述感光组件30包括线路板、电连接于所述线路板的感光芯片31和被保持于所述感光芯片31的感光路径上的滤光元件。更具体
地,在如图2所示意的示例中,所述感光组件30,进一步包括设置于所述线路板的支架,其中,所述滤光元件被安装于所述支架上以被保持于所述感光芯片31的感光路径上。
54.值得一提的是,在本技术其他示例中,所述滤光元件被保持于所述感光芯片31的感光路径上的具体实施方式并不为本技术所局限,例如,所述滤光元件可被实施为滤波膜并涂覆于所述透镜组20的某一光学透镜的表面,以起到滤光的效果,再如,所述感光组件30可进一步包括安装于所述支架的滤光元件支架(未有图示意),其中,所述滤光元件以被安装于所述滤光元件支架的方式被保持于所述感光芯片31的感光路径上。
55.如前所述,为了满足越来越广泛的市场需求,高像素、大芯片、小尺寸是现有摄像模组不可逆转的发展趋势。随着感光芯片31朝着高像素和大芯片的方向发展,与感光芯片31适配的光学部件的尺寸和重量也逐渐增大,这给用于驱动光学部件以进行光学防抖的驱动器带来的新的挑战。在该实施例中,随着所述感光芯片31朝着高像素和大芯片的方向发展,所述成像校正元件的光校正元件的尺寸和重量逐渐增大,这给用于驱动所述成像校正元件的驱动器提出了新的技术要求。
56.新的技术要求主要集中于两个方面:相对更大的驱动力,以及,更优的驱动性能(具体地包括:更高精度的驱动控制和更长的驱动行程)。并且,除了需要寻找满足新技术要求的驱动器以外,在选择新驱动器时还需要考虑所选择的驱动器能够适应于当下摄像模组轻型化和薄型化的发展趋势。
57.经研究和试验,本技术发明人提出了一种具有新型结构的压电致动器,该压电致动器能够满足所述摄像模组对于驱动器的技术要求。并且,进一步地采用合适的布置方式将所述压电致动器布置于所述摄像模组内,以使得其满足所述摄像模组的结构设计要求和尺寸设计要求。
58.图5图示了根据本技术实施例的所述压电致动器的示意图。如图5所示,在本技术实施例中,所述压电致动器100包括环形压电结构110和电连接于所述环形压电结构110的驱动电路系统,其中,所述环形压电结构110在所述驱动电路系统的控制下发生波状形状以产生用于旋转所述第一光校正元件12或所述第二光校正元件14的驱动力。
59.具体地,所述环形压电结构110包括:第一压电结构111、第二压电结构112以及延伸于所述第一压电结构111和所述第二压电结构112之间的第一间隔区113和第二间隔区114,其中,所述第一间隔区113和所述第二间隔区114被接地。特别地,在该实施例中,所述第一压电结构111和所述第二压电结构112具有c型结构。所述第一压电结构111和第二压电结构112波长不同,相差半个波长。所述第一压电结构111的极化方向设置为与第二压电结构112的极化方向相反。
60.在本技术其他示例中,所述第一压电结构111与所述第二压电结构112也可以设置为若干个压电片组合而成,相邻的两段压电片的极化方向相反。也就是,在该实施例中,所述第一压电结构111包括多组相互交替的第一压电段和第二压电段,所述第一压电段和所述第二压电段具有相反的极化方向;所述第二压电结构112包括多组相互交替的第三压电段和第四压电段,所述第三压电段和所述第四压电段具有相反的极化方向。当所述第一压电结构111和所述第二压电结构112施加电压时,两个相邻的压电端的极化方向相反,其中一个压电端收缩,相邻的压电段伸长。
61.所述环形压电结构110的表面电镀金属材料层,用于与所述感光组件30的线路板
进行电连接,以导通所述环形压电结构110。所述环形压电结的下表面设置引脚,通过引脚与所述线路板电连接。在本技术实施例中,所述环形压电结被设置为两个相同的压电体粘合成一体而成,即,由所述第一压电结构111和所述第二压电结构112粘合而成,其中,当分别施加时间上相差90
°
电角度的交流电压时,所述第一压电结构111和所述第二压电结构112就分别作驻波振动。此时可以认为,所述环形压电结构110的表面上的每一个质点形成一定运动轨迹的超声波微观振动,通常为椭圆轨迹,所述第一压电结构111和所述第二压电结构112的驻波振动所合成的振动波为一个随时间前进的行波,即所述压电致动器100为行波振动压电致动器100。
62.在选择以所述压电致动器100作为驱动所述防抖光学组件10的驱动器时,在本技术实施例中,所述驱动组件40包括第一驱动元件41和第二驱动元件42,所述第一驱动元件41和所述第二驱动元件42被实施为压电致动器100,其中,所述第一驱动元件41被配置为驱动所述第一光校正元件12绕着所述光轴旋转,所述第二驱动元件42被配置为驱动所述第二光校正元件14绕着所述光轴旋转,通过这样的方式,使得所述第一光校正元件12和所述第二光校正元件14之间的相对位置关系可调整以改变该成像光线的传播路径来进行光学防抖。
63.更具体地,由于所述压电致动器100具有环形结构,其天然形成通光孔。也就是,在该实施例中,所述第一驱动元件41具有第一通光孔,所述第二驱动元件42具有第二通光孔,其中,所述第一驱动元件41被安装于所述第一光校正元件12的竖直光学面的边缘区域,通过这样的安装位置使得来自所述光转折元件11的成像光线能够藉由所述第一驱动元件41的第一通光孔透过所述第一光校正元件12;所述第二驱动元件42被安装于所述第二光校正元件14的竖直光学面的边缘区域,通过这样的安装位置使得从所述第二光校正元件14的倾斜光学面进入所述第二光校正元件14的成像光线能够藉由所述第二驱动元件42的第二通光孔透出。
64.也就是,在本技术实施例中,选择所述压电致动器100作为驱动所述防抖光学组件10的驱动器,不仅能满足光学防抖的驱动要求,并且,所述压电致动器100还不会影响到正常的成像光线的传播。除此之外,当所述第一驱动元件41被安装于所述第一光校正元件12的竖直光学面的边缘区域,所述第一驱动元件41还形成用于所述第一光校正元件12的光栅,即,通过所述第一驱动元件41还能够防止杂散光进入所述第一光校正元件12以提高成像质量。同样地,当所述第二驱动元件42被安装于所述第二光校正元件14的竖直光学面的边缘区域,所述第二驱动元件42形成用于所述第二光校正元件14的光栅,以通过所述第二驱动元件42约束所述第二光校正元件14的出光孔径。
65.在本技术一个具体的示例中,所述第一光校正元件12具有凹陷地形成于其竖直光学面的边缘区域的第一安装槽,所述第一驱动元件41以被安装于所述第一安装槽的方式被安装于所述第一光校正元件12的竖直光学面的边缘区域。这里,所述黏着剂优选为柔性材料粘接层,例如,环氧树脂等材料,其可以将所述压电致动器100由于形变产生的摩擦力线性地传递给所述第一光校正元件12。
66.相一致地,所述第二光校正元件14具有凹陷地形成于其竖直光学面的边缘区域的第二安装槽,所述第二驱动元件42以被安装于所述第二安装槽的方式被安装于所述第二光校正元件14的竖直光学面的边缘区域。这里,所述黏着剂优选为柔性材料粘接层,例如,环
氧树脂等材料,其可以将所述压电致动器100由于形变产生的摩擦力线性地传递给所述第二光校正元件14。
67.在工作过程中,当所述压电致动器100的驱动电路系统对所述环形压电结构110施加一正向电压时,所述环形压电结构110产生一随时间前进的行波,所述环形压电结构110产生的微观振动,宏观表现为所述环形压电结构110产生有规律的形变。同时,所述环形压电结构110的表面设置所述第一光校正元件12或所述第二光校正元件14,所述环形压电结构110通电产生的微观振动,这样,通过所述环形压电结构110的表面与所述第一光校正元件12或所述第二光校正元件14的表面之间的摩擦作用,使所述第一光校正元件12或所述第二光校正元件14沿顺时针方向,也就是行波传播方向的反方向,做连续宏观的旋转运动,从而驱动所述第一光校正元件12或所述第二光校正元件14旋转。
68.当所述压电致动器100的驱动电路系统对所述环形压电结构110施加一反向电压时,所述环形压电结构110产生一随时间前进的行波,所述环形压电结构110产生的微观振动,宏观表现为所述环形压电结构110产生有规律的形变,同时所述环形压电结构110的表面设置所述第一光校正元件12或所述第二光校正元件14,这样,所述环形压电结构110通电产生的微观振动,通过所述环形压电结构110的表面与所述第一光校正元件12或所述第二光校正元件14的表面之间的摩擦作用,使所述第一光校正元件12或所述第二校正元件沿逆时针方向,也就是行波传播方向的反方向,做连续宏观的旋转运动,从而驱动所述第一光校正元件12或所述第二校正元件旋转。
69.在本技术实施例中,所述第一驱动元件41被配置为驱动所述第一光校正元件12绕着所述光轴旋转,所述第二驱动元件42被配置为驱动所述第二光校正元件14绕着所述光轴旋转,通过这样的方式,使得所述第一光校正元件12和所述第二光校正元件14之间的相对位置关系可调整以改变该成像光线的传播路径来进行光学防抖。
70.综上,基于本技术实施例的所述摄像模组被阐明,其在其成像路径上设有防抖光学组件10,所述防抖光学组件10适于改变成像光线的传播路径以进行光学防抖。特别地,所述摄像模组采用新型的压电致动器100作为驱动器来满足所述防抖光学组件10的作动要求。并且,采用合理的布设方案将所述压电致动器100布设于所述摄像模组内,以进一步满足所述摄像模组的结构和尺寸要求。
71.图6图示了根据本技术实施例的所述摄像模组的一个变形实施例的示意图。在该变形实施例中,所述第一光校正元件12和所述第二光校正元件14的类型和结构做出了调整。
72.具体地,如图6所示,在该变形实施例中,所述第一光校正元件12和所述第二光校正元件14被实施为圆柱形光学透镜,所述圆柱形光学透镜具有第一光学面和第二光学面,其中,所述圆柱形光学透镜包括形成于其第二光学面的多个微结构,每个所述微结构具有倾斜光学面。
73.更具体地,在该变形实施例中,各所述微结构具有倾斜光学面,各所述倾斜光学面相对于所述光轴倾斜,且所述第一光校正元件12和所述第二光校正元件14能相对于所述光轴旋转,以校正通过所述成像校正单元的光束的行进方向。在一个具体的示例中,所述第一光校正元件12和/或所述第二光校正元件14的所述倾斜光学面相对于所述光轴的夹角的角度范围大于45度且小于90度。所述第一光校正元件12和所述第二光校正元件14的所述第二
光学面的周围具有平坦面,各所述微结构相对于所述平坦面凸出或凹入,其中,所述第一光校正元件12和所述第二光校正元件14的的所述倾斜光学面相对于所述平坦面的夹角的角度范围介于0度至45度之间。
74.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。