1.本发明涉及桥梁建设技术领域,特别是一种预制箱梁桥施工监控方法及相关设备。
背景技术:
2.建筑信息模型(building information modeling,bim)是建筑学、工程学及土木工程的新工具。用于形容那些以三维图形为主、物件导向、建筑学有关的电脑辅助设计。bim具备模型几何表达和信息综合的双重角色,可以将桥梁全生命周期内的数据进行整合,形成统一的有机体,实现每个施工工序的数据化显示与查看。
3.然而,现有客观条件下,施工单位将长期面临二维图表模式与信息化模式共存的工作局面。无法有效的将现有的二维图表转换到信息化建模上,又尽可能地保留传统二维图表模式积累下来的经验和习惯,导致现阶段预制箱梁桥的项目施工监控无法应用bim技术,使得预制箱梁桥施工监控不方便。
技术实现要素:
4.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种预制箱梁桥施工监控方法及相关设备,实现了预制箱梁桥施工的智能监控。
5.本发明第一方面提供一种预制箱梁桥施工监控方法,包括:
6.获取预制箱梁桥的bim模型,并提取得到模型坐标数据;
7.对bentley的桥梁建模软件配置二次开发环境;
8.基于二次开发环境对模型坐标数据进行分段处理,将预制箱梁桥划分为多个节段;
9.获取当前浇筑节段的高程控制点的理论坐标数据及实测坐标数据,计算得到当前浇筑节段的控制点相对高程误差;
10.根据分段阈值逐次纠偏策略、控制点相对高程误差及预设纠偏阈值,对当前浇筑节段的控制点相对高程误差进行纠正调整,生成节段纠偏信息;
11.根据所有节段的高程控制点的理论坐标数据生成可视化的理论高程控制线,并根据节段纠偏信息生成可视化的纠偏高程控制线。
12.可选的,对bentley的桥梁建模软件配置二次开发环境,包括:
13.在不同的系统环境下预装bentley的桥梁建模软件,并匹配安装软件开发工具包sdk及代码编程工具开发环境;
14.sdk包括各类可扩展的应用程序编程接口api。
15.可选的,基于二次开发环境对模型坐标数据进行分段处理,将预制箱梁桥划分为多个节段,包括:
16.将模型坐标数据导入到配置二次开发环境的bentley的桥梁建模软件;
17.依据预设分段模式对模型坐标数据进行分段处理,得到n个节段坐标数据,n大于
等于4;
18.根据n个节段坐标数据确定预制箱梁桥划分为n个节段。
19.可选的,获取当前浇筑节段的高程控制点的理论坐标数据及实测坐标数据,计算得到当前浇筑节段的控制点相对高程误差,包括:
20.获取当前浇筑节段的节段坐标数据,从节段坐标数据中提取得到高程控制点的理论坐标数据;
21.接收高程控制点的实测坐标数据;
22.从理论坐标数据中选择理论高程zi,从实测坐标数据中选择实际高程zj;
23.通过公式计算得到当前浇筑节段的控制点相对高程误差η。
24.可选的,根据分段阈值逐次纠偏策略、控制点相对高程误差及预设纠偏阈值,对当前浇筑节段的控制点相对高程误差进行纠正调整,生成节段纠偏信息,包括:
25.确定当前浇筑节段为第m节段,m大于等于1且小于n;
26.获取预设纠偏阈值,预设纠偏阈值包括第一阈值a%,第二阈值b%即第三阈值c%;
27.根据分段阈值逐次纠偏策略比较控制点相对高程误差η和预设纠偏阈值;
28.当η≤a%时,对待浇筑的第m 1节段的理论高程控制点进行纠正调整,得到第m 1节段的纠偏高程控制点高程,作为节段纠偏信息;
29.当a%<η≤b%时,通过均分方式对待浇筑的第m 1节段和第m 2节段的理论高程控制点进行纠正调整,得到第m 1节段和第m 2节段的纠偏高程控制点高程,作为节段纠偏信息;
30.当b%<η≤c%时,通过均分方式对待浇筑的第m 1节段、第m 2节段和第m 3节段的理论高程控制点进行纠正调整,得到第m 1节段、第m 2节段及第m 3节段的纠偏高程控制点高程,作为节段纠偏信息;
31.当c%<η时,确定第m节段出现控制点相对误差超限,生成警告信息,并通过均分方式计算得到第m 1节段、第m 2节段、第m 3节段及第m 4节段的纠偏高程控制点高程,根据各节段的纠偏高程控制点高程及警告信息生成节段纠偏信息。
32.可选的,根据所有节段的高程控制点的理论坐标数据生成可视化的理论高程控制线,并根据节段纠偏信息生成可视化的纠偏高程控制线,包括:
33.根据所有节段的高程控制点的理论坐标数据,得到所有节段的理论高程控制点高程,按照节段顺序将对应的理论高程控制点高程进行连线,得到可视化的理论高程控制线;
34.根据节段纠偏信息确定进行了纠正调整的纠偏节段,并得到纠偏节段的纠偏高程控制点高程;
35.将未纠偏节段的纠偏高程控制点高程赋值为0;
36.按照所有节段的节段顺序将对应的纠偏高程控制点高程进行连线,得到可视化的纠偏高程控制线。
37.本发明第二方面提供一种预制箱梁桥施工监控设备,包括:
38.数据获取模块,用于获取预制箱梁桥的bim模型,并提取得到模型坐标数据;
39.二次开发环境配置模块,用于对bentley的桥梁建模软件配置二次开发环境;
40.节段划分模块,用于基于二次开发环境对模型坐标数据进行分段处理,将预制箱梁桥划分为多个节段;
41.相对高程误差计算模块,用于获取当前浇筑节段的高程控制点的理论坐标数据及实测坐标数据,计算得到当前浇筑节段的控制点相对高程误差;
42.纠偏模块,用于根据分段阈值逐次纠偏策略、控制点相对高程误差及预设纠偏阈值,对当前浇筑节段的控制点相对高程误差进行纠正调整,生成节段纠偏信息;
43.可视化控制线生成模块,用于根据所有节段的高程控制点的理论坐标数据生成可视化的理论高程控制线,并根据节段纠偏信息生成可视化的纠偏高程控制线。
44.可选的,纠偏模块包括:
45.节段确定单元,用于确定当前浇筑节段为第m节段,m大于等于1且小于n;
46.纠偏阈值获取单元,用于获取预设纠偏阈值,预设纠偏阈值包括第一阈值a%,第二阈值b%即第三阈值c%;
47.纠偏执行单元,用于根据分段阈值逐次纠偏策略比较控制点相对高程误差η和预设纠偏阈值;
48.纠偏执行单元,还用于当η≤a%时,对待浇筑的第m 1节段的理论高程控制点进行纠正调整,得到第m 1节段的纠偏高程控制点高程,作为节段纠偏信息;当a%<η≤b%时,通过均分方式对待浇筑的第m 1节段和第m 2节段的理论高程控制点进行纠正调整,得到第m 1节段和第m 2节段的纠偏高程控制点高程,作为节段纠偏信息;当b%<η≤c%时,通过均分方式对待浇筑的第m 1节段、第m 2节段和第m 3节段的理论高程控制点进行纠正调整,得到第m 1节段、第m 2节段及第m 3节段的纠偏高程控制点高程,作为节段纠偏信息;当c%<η时,确定第m节段出现控制点相对误差超限,生成警告信息,并通过均分方式计算得到第m 1节段、第m 2节段、第m 3节段及第m 4节段的纠偏高程控制点高程,根据各节段的纠偏高程控制点高程及警告信息生成节段纠偏信息。
49.本发明第三方面提供一种计算机设备,包括:处理器,处理器执行计算机程序时实现以上第一方面的预制箱梁桥施工监控方法。
50.本发明第四方面一种计算机存储介质,其存储有计算机程序,其特征在于,计算机程序被处理器执行时实现以上第一方面的预制箱梁桥施工监控方法。
51.有益效果:
52.本发明先获取预制箱梁桥的bim模型,并提取得到模型坐标数据,对bentley的桥梁建模软件配置二次开发环境,基于二次开发环境对模型坐标数据进行分段处理,将预制箱梁桥划分为多个节段,获取当前浇筑节段的高程控制点的理论坐标数据及实测坐标数据,计算得到当前浇筑节段的控制点相对高程误差,根据分段阈值逐次纠偏策略、控制点相对高程误差及预设纠偏阈值,对当前浇筑节段的控制点相对高程误差进行纠正调整,生成节段纠偏信息,根据所有节段的高程控制点的理论坐标数据生成可视化的理论高程控制线,并根据节段纠偏信息生成可视化的纠偏高程控制线。实现了将bim技术应到预制箱梁桥施工监控,并且在预制箱梁桥分段的基础上,制定了分段阈值逐次纠偏策略进行误差纠偏,最终形成可视化的理论高程控制线和纠偏高程控制线,促进了预制箱梁桥从传统数据坐标线形监控到三维一体化监控的有效发展。实现了预制箱梁桥施工的智能监控。
附图说明
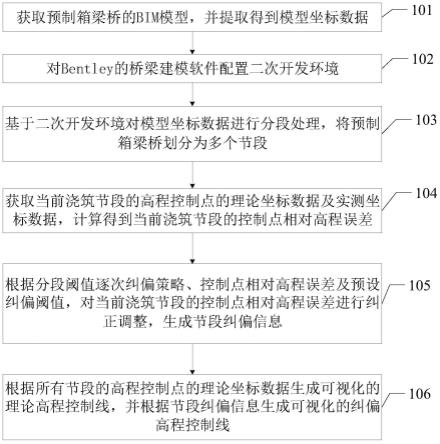
53.图1是本发明的预制箱梁桥施工监控方法的流程示意图。
54.图2是本发明的高程控制线生成过程的示意图。
55.图3是本发明的控制点相对高程误差的计算过程的示意图。
56.图4是本发明的控制点相对高程误差的纠偏过程的示意图。
57.图5是本发明的预制箱梁桥施工监控设备的结构示意图。
58.图6是本发明的纠偏模块的示意图。
具体实施方式
59.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施;在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
60.如图1所示,本发明实施例提出一种预制箱梁桥施工监控方法,包括:
61.101,获取预制箱梁桥的bim模型,并提取得到模型坐标数据;
62.其中,预制箱梁桥在进行浇筑之前,工程师会制作出纸质二维图及cad图等三维图表,导入到bim软件之后形成bim模型,从bim模型提取得到预制箱梁桥的模型坐标数据。
63.102,对bentley的桥梁建模软件配置二次开发环境;
64.其中,bentley软件是一款系列软件,包含三维参数化建模、曲面和实体造型、管线建模、设施规划、gis映射、3d hvac建模等功能模块。其中,bentley的桥梁建模软件openbridge modeler,适用于本发明的预制箱梁桥的场景中。在不同操作系统(windows、macos或linux)中均需成功预装官方稳定版本的openbridge modeler connect edition,并匹配安装软件开发工具包sdk(software development kit)和.net framework版本为4.6.2的visual studio 2017集成开发环境;sdk包括各类可扩展的应用程序编程接口api。sdk包括访问文档中对象api、用户选择交互api、文档级别事件api等开发辅助工具;托管型sdk的项目开发代码需要采用c#或者托管的c 语言编写;非托管型sdk的项目代码必须使用原生的c 来编写,并且需要通过包含sdk安装中所带头文件及库文件的方式来访问sdk的功能。
65.103,基于二次开发环境对模型坐标数据进行分段处理,将预制箱梁桥划分为多个节段;
66.其中,将模型坐标数据导入到配置二次开发环境的bentley的桥梁建模软件,依据预设分段模式对模型坐标数据进行分段处理,得到n个节段坐标数据,n大于等于4,根据n个节段坐标数据确定预制箱梁桥划分为n个节段。
67.104,获取当前浇筑节段的高程控制点的理论坐标数据及实测坐标数据,计算得到当前浇筑节段的控制点相对高程误差;
68.其中,在对当前的节段进行浇筑的时候,需要实时的进行测量当前浇筑节段的数据,得到实测坐标数据,因此,可以获取到当前浇筑节段的高程控制点的理论坐标数据及实测坐标数据,通过数据中的控制点坐标数据中的高程,计算得到当前浇筑节段的控制点相对高程误差,即当前浇筑节段的实际高程与理论高程的相对误差,表现了浇筑过程的失误
或者偏差。
69.105,根据分段阈值逐次纠偏策略、控制点相对高程误差及预设纠偏阈值,对当前浇筑节段的控制点相对高程误差进行纠正调整,生成节段纠偏信息;
70.其中,预设纠偏阈值是预先设置的,为了针对分段阈值逐次纠偏策略所设置的,包含了多个不同数值的纠偏阈值,按照分段阈值逐次纠偏策略,控制点相对高程误差落在不同的纠偏阈值的区间中,就会进行不同的纠正调整,最后得到节段纠偏信息。
71.106,根据所有节段的高程控制点的理论坐标数据生成可视化的理论高程控制线,并根据节段纠偏信息生成可视化的纠偏高程控制线。
72.其中,具体的高程控制线生成过程如图2所示,包括:
73.201,根据所有节段的高程控制点的理论坐标数据,得到所有节段的理论高程控制点高程,按照节段顺序将对应的理论高程控制点高程进行连线,得到可视化的理论高程控制线;
74.202,根据节段纠偏信息确定进行了纠正调整的纠偏节段,并得到纠偏节段的纠偏高程控制点高程;
75.203,将未纠偏节段的纠偏高程控制点高程赋值为0;
76.204,按照所有节段的节段顺序将对应的纠偏高程控制点高程进行连线,得到可视化的纠偏高程控制线。
77.本发明实施例的原理为:
78.先获取预制箱梁桥的bim模型,并提取得到模型坐标数据,对bentley的桥梁建模软件配置二次开发环境,基于二次开发环境对模型坐标数据进行分段处理,将预制箱梁桥划分为多个节段,获取当前浇筑节段的高程控制点的理论坐标数据及实测坐标数据,计算得到当前浇筑节段的控制点相对高程误差,根据分段阈值逐次纠偏策略、控制点相对高程误差及预设纠偏阈值,对当前浇筑节段的控制点相对高程误差进行纠正调整,生成节段纠偏信息,根据所有节段的高程控制点的理论坐标数据生成可视化的理论高程控制线,并根据节段纠偏信息生成可视化的纠偏高程控制线。实现了将bim技术应到预制箱梁桥施工监控,并且在预制箱梁桥分段的基础上,制定了分段阈值逐次纠偏策略进行误差纠偏,最终形成可视化的理论高程控制线和纠偏高程控制线,促进了预制箱梁桥从传统数据坐标线形监控到三维一体化监控的有效发展。实现了预制箱梁桥施工的智能监控。
79.在以上图1实施例中,步骤104中对于控制点相对高程误差的计算过程,具体如下图3所示,包括:
80.301,获取当前浇筑节段的节段坐标数据,从节段坐标数据中提取得到高程控制点的理论坐标数据;
81.在进行了分段之后,模型坐标数据划分为了多个节段坐标数据,那么将当前浇筑节段的节段坐标数据提取出来,再其中找到高程控制点的理论坐标数据。
82.302,接收高程控制点的实测坐标数据;
83.在浇筑节段的过程中进行实时测量,得到实际测量的坐标数据,从而接收到高程控制点的实测坐标数据。
84.303,从理论坐标数据中选择理论高程zi,从实测坐标数据中选择实际高程zj;
85.其中,理论坐标数据中的理论高程为zi,实测坐标数据中的实际高程为zj。
86.304,通过公式计算得到当前浇筑节段的控制点相对高程误差η。
87.在以上图3所示的实施例的基础上,对图1所示的实施例中步骤105中控制点相对高程误差的纠偏过程进行说明,具体如下图4所示,包括:
88.401,确定当前浇筑节段为第m节段;
89.其中,整体预制箱梁桥共具有n个节段,m大于等于1且小于n。
90.402,获取预设纠偏阈值;
91.其中,预设纠偏阈值包括第一阈值a%,第二阈值b%即第三阈值c%,第三阈值c%>第二阈值b%>第一阈值a%。
92.403,根据分段阈值逐次纠偏策略比较控制点相对高程误差η和预设纠偏阈值;
93.404,当η≤a%时,对待浇筑的第m 1节段的理论高程控制点进行纠正调整,得到第m 1节段的纠偏高程控制点高程,作为节段纠偏信息;
94.405,当a%<η≤b%时,通过均分方式对待浇筑的第m 1节段和第m 2节段的理论高程控制点进行纠正调整,得到第m 1节段和第m 2节段的纠偏高程控制点高程,作为节段纠偏信息;
95.406,当b%<η≤c%时,通过均分方式对待浇筑的第m 1节段、第m 2节段和第m 3节段的理论高程控制点进行纠正调整,得到第m 1节段、第m 2节段及第m 3节段的纠偏高程控制点高程,作为节段纠偏信息;
96.407,当c%<η时,确定第m节段出现控制点相对误差超限,生成警告信息,并通过均分方式计算得到第m 1节段、第m 2节段、第m 3节段及第m 4节段的纠偏高程控制点高程,根据各节段的纠偏高程控制点高程及警告信息生成节段纠偏信息。
97.其中,在第m节段出现了控制点相对误差超限,生成警告信息的同时,之所以还需要进行纠偏,是为了保证程序的正常运行,避免出现运行报错。
98.在以上图1-图4的实施例中描述了预制箱梁桥施工监控方法,下面通过实施例对执行该方法的预制箱梁桥施工监控设备进行说明,如图5所示,预制箱梁桥施工监控设备包括:
99.数据获取模块501,用于获取预制箱梁桥的bim模型,并提取得到模型坐标数据;
100.二次开发环境配置模块502,用于对bentley的桥梁建模软件配置二次开发环境;
101.节段划分模块503,用于基于二次开发环境对模型坐标数据进行分段处理,将预制箱梁桥划分为多个节段;
102.相对高程误差计算模块504,用于获取当前浇筑节段的高程控制点的理论坐标数据及实测坐标数据,计算得到当前浇筑节段的控制点相对高程误差;
103.纠偏模块505,用于根据分段阈值逐次纠偏策略、控制点相对高程误差及预设纠偏阈值,对当前浇筑节段的控制点相对高程误差进行纠正调整,生成节段纠偏信息;
104.可视化控制线生成模块506,用于根据所有节段的高程控制点的理论坐标数据生成可视化的理论高程控制线,并根据节段纠偏信息生成可视化的纠偏高程控制线。
105.本发明实施例中实现了将bim技术应到预制箱梁桥施工监控,并且在预制箱梁桥分段的基础上,制定了分段阈值逐次纠偏策略进行误差纠偏,最终形成可视化的理论高程控制线和纠偏高程控制线,促进了预制箱梁桥从传统数据坐标线形监控到三维一体化监控
的有效发展。
106.结合以上图5所示的实施例,如图6所示,纠偏模块505包括:
107.节段确定单元601,用于确定当前浇筑节段为第m节段,m大于等于1且小于n;
108.纠偏阈值获取单元602,用于获取预设纠偏阈值,预设纠偏阈值包括第一阈值a%,第二阈值b%即第三阈值c%;
109.纠偏执行单元603,用于根据分段阈值逐次纠偏策略比较控制点相对高程误差η和预设纠偏阈值;
110.纠偏执行单元603,还用于当η≤a%时,对待浇筑的第m 1节段的理论高程控制点进行纠正调整,得到第m 1节段的纠偏高程控制点高程,作为节段纠偏信息;当a%<η≤b%时,通过均分方式对待浇筑的第m 1节段和第m 2节段的理论高程控制点进行纠正调整,得到第m 1节段和第m 2节段的纠偏高程控制点高程,作为节段纠偏信息;当b%<η≤c%时,通过均分方式对待浇筑的第m 1节段、第m 2节段和第m 3节段的理论高程控制点进行纠正调整,得到第m 1节段、第m 2节段及第m 3节段的纠偏高程控制点高程,作为节段纠偏信息;当c%<η时,确定第m节段出现控制点相对误差超限,生成警告信息,并通过均分方式计算得到第m 1节段、第m 2节段、第m 3节段及第m 4节段的纠偏高程控制点高程,根据各节段的纠偏高程控制点高程及警告信息生成节段纠偏信息。
111.通过纠偏模块505中的节段确定单元601确定第m节段,纠偏阈值获取单元602获取预设纠偏阈值,纠偏执行单元603根据分段阈值逐次纠偏策略比较控制点相对高程误差η和预设纠偏阈值,从而实现控制点相对高程误差在不同的纠偏阈值区间内执行不同的纠偏策略。实现了多节段情况下预制箱梁桥的高程误差纠偏。
112.本发明第三方面提供一种计算机设备,包括:处理器,处理器执行计算机程序时实现以上图1-图4实施例中的预制箱梁桥施工监控方法。
113.本发明第四方面一种计算机存储介质,其存储有计算机程序,其特征在于,计算机程序被处理器执行时实现以上图1-图4实施例中的预制箱梁桥施工监控方法。
114.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。