1.本技术涉及电子设备技术领域,更具体地,涉及一种双目融合度的测量系统和测量方法。
背景技术:
2.随着科技的发展,xr设备在现实生活中的应用也越来越广泛。xr设备即是指ar(增强现实)、vr(虚拟现实)或mr(混合现实)等成像设备,为了提高其使用的便利性,通常设计为具有左镜片和右镜片的双目型头戴设备,例如眼镜等形式。
3.上述头戴形式的xr设备在使用中,左镜片和右镜片的双目融合度如果不好,会导致用户在使用过程中形成双眼视差,导致用户容易出现头晕、头疼等不适体验。鉴于此,在实际生产中,有必要对出厂的xr设备的双目融合度进行测量,以筛选出合格产品,提高用户体验。
技术实现要素:
4.本技术的一个目的是提供一种撒谎木融合度的测量系统和测量方法的新技术方案,以检测xr设备的双目融合度。
5.根据本技术的第一方面,提供了一种双目融合度的测量系统,应用于xr设备,所述xr设备具有第一镜片和第二镜片,所述测量系统包括:
6.第一相机和第二相机,所述第一相机与所述第二相机之间的距离等于人眼的瞳距;
7.测试图像,所述测试图像位于所述第一相机和所述第二相机的物侧,使所述第一相机和所述第二相机能够拍摄所述测试图像;所述测试图像所在平面与所述第一相机之间的距离为所述第一镜片成像后的虚像距离,与所述第二相机之间的距离为所述第二镜片成像后的虚像距离;
8.图像处理模块,所述图像处理模块能够分别获取所述第一相机和所述第二相机拍摄的所述测试图像的照片,并进行处理分析。
9.可选地,所述测试图像为棋盘格。
10.可选地,所述棋盘格的远离于所述第一相机和所述第二相机的一侧背设有光源。
11.根据本技术的第二方面,提供了一种双目融合度的测量方法,包括:
12.对第一方面所述的双目融合度的测量系统进行校准,使所述第一相机和所述第二相机的姿态保持一致;
13.通过所述第一相机对所述测试图像进行拍照得到第一图像,获取所述第一图像的参数记为第一校准参数;以及,通过所述第二相机对所述测试图像进行拍照得到第二图像,获取所述第二图像的参数记为第二校准参数;
14.使所述第一镜片在所述第一相机的物侧形成第一虚像,以及使所述第二镜片在所述第二相机的物侧形成第二虚像,所述第一虚像和所述第二虚像与所述测试图像相同;
15.通过所述第一相机对所述第一虚像进行拍照得到第三图像,获取所述第三图像的参数记为第一测量参数;以及,通过所述第二相机对所述第二虚像进行拍照得到第四图像,获取所述第四图像的参数记为第二测量参数;
16.分别对比所述第一校准参数与所述第一测量参数,以及所述第二校准参数与所述第二测量参数,根据对比结果判定所述xr设备的双目融合度。
17.可选地,所述第一镜片到所述第一相机之间的距离等于所述第一镜片到人眼的佩戴距离;以及,所述第二镜片到所述第二相机之间的距离等于所述第二镜片到人眼的佩戴距离。
18.可选地,对所述双目融合度的测量系统进行校准,包括:
19.在所述测试图像上选取第一参考点和第二参考点,所述第一参考点和所述第二参考点所在的直线为参考直线;
20.所述第一校准参数包括所述第一参考点和所述第二参考点在所述第一图像中的坐标,通过坐标计算所述参考直线与x轴在所述第一图像中的夹角,并记为第一夹角;
21.所述第二校准参数包括所述第一参考点和所述第二参考点在所述第二图像中的坐标,通过坐标计算所述参考直线与x轴在所述第二图像中的夹角,并记为第二夹角;
22.分别调整所述第一相机和所述第二相机的姿态,使所述第一夹角和第二夹角为预定角度值。
23.可选地,所述预定角度值的取值范围为0
°
~0.8
°
。
24.可选地,判定所述xr设备的双目融合度时,包括:
25.所述第一测量参数包括所述第一参考点和所述第二参考点在所述第三图像中的坐标,通过坐标计算所述第三图像相对于所述第一图像的旋转角度和偏移量,并记为第一旋转角度和第一偏移量;
26.所述第二测量参数包括所述第一参考点和所述第二参考点在所述第四图像中的坐标,通过坐标计算所述第四图像相对于所述第二图像的旋转角度和偏移量,并记为第二旋转角度和第二偏移量;
27.通过所述第一旋转角度和所述第一偏移量的大小判定所述第一镜片的融合度;以及,通过所述第二旋转角度和所述第二偏移量的大小判定所述第二镜片的融合度。
28.可选地,计算所述第一旋转角度和所述第二旋转角度,包括:
29.通过坐标计算所述参考直线与x轴分别在所述第三图像和所述第四图像中的夹角,并对应记为第三夹角和第四夹角;
30.对所述第三夹角和所述第一夹角的角度值做差,得到所述第一旋转角度;以及,对所述第四夹角和所述第二夹角的角度值做差,得到所述第二旋转角度。
31.可选地,计算所述第一偏移量和所述第二偏移量包括:
32.取所述第一参考点和所述第二参考点在所述参考直线上的中点,记为第三参考点,分别获取所述第三参考点在所述第一图像、所述第二图像、所述第三图像和所述第四图像中的坐标;
33.对所述第三参考点在所述第一图像中的坐标和在所述第三图像中的坐标比较做差,得到所述第一偏移量;以及,对所述第三参考点在所述第二图像中的坐标和在所述第四图像中的坐标比较做差,得到所述第二偏移量。
34.根据本技术的一个实施例,本技术提供的双目融合度的测量系统,能够模拟人眼对xr设备的双目融合度进行测量,根据测量结果可筛选出双目融合度合格的产品,以提高用户体验。并且测量系统的结构简单,易于制造,降低了测量成本。
35.另外,本技术提供的双目融合度的测量方法可通过上述测量系统实现,测量过程简单、易操作,并且具有对测量系统的校正步骤,使得测量结果更加准确,进一步降低了测量成本。
36.通过以下参照附图对本技术的示例性实施例的详细描述,本技术的其它特征及其优点将会变得清楚。
附图说明
37.被结合在说明书中并构成说明书的一部分的附图示出了本技术的实施例,并且连同其说明一起用于解释本技术的原理。
38.图1是本技术提供的一种双目融合度的测量系统的校正示意图。
39.图2是本技术提供的一种双目融合度的测量系统的测量示意图。
40.图3是第一参考点、第二参考点以及第三参考点的位置示意图。
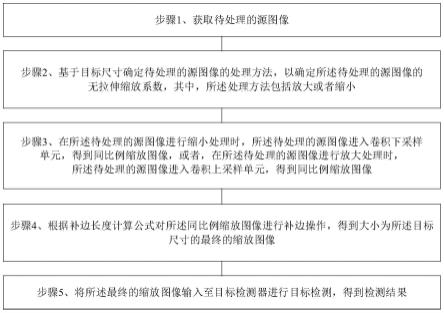
41.图4是本技术提供的一种双目融合度的测量方法的流程图。
42.附图标记说明:
43.1、第一相机;2、第二相机;3、测试图像;31、第一图像;32、第二图像;4、第一镜片;41、第一虚像;42、第三图像;5、第二镜片;51、第二虚像;52、第四图像。
具体实施方式
44.现在将参照附图来详细描述本技术的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本技术的范围。
45.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本技术及其应用或使用的任何限制。
46.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
47.在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
48.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
49.如图1指图2所示,本技术提供了一种双目融合度的测量系统,应用于xr设备,所述xr设备具有第一镜片4和第二镜片5,所述测量系统包括:第一相机1、第二相机2、测试图像3和图像处理模块;所述第一相机1与所述第二相机2之间的距离等于人眼的瞳距;所述测试图像3位于所述第一相机1和所述第二相机2的物侧,使所述第一相机1和所述第二相机2能够拍摄所述测试图像3;所述测试图像3所在平面与所述第一相机1之间的距离为所述第一镜片4成像后的虚像距离,与所述第二相机2之间的距离为所述第二镜片5成像后的虚像距离;所述图像处理模块能够分别获取所述第一相机1和所述第二相机2拍摄的所述测试图像
3的照片,并进行处理分析。
50.具体地,在本技术中,xr设备可以为ar(增强现实)、vr(虚拟现实)或mr(混合现实)等双目成像设备,其双目融合度可以表征出xr设备成像的清晰度等,双目融合度高的话,成像效果好,能够提高用户的使用体验。在测量系统中,设置第一相机1和第二相机2可以对测试图像3以及xr设备形成的虚像进行拍摄,并将拍摄的图片传输至图像处理模块,图像处理模块可以从图像中获取参数信息,并对其进行分析处理,其中,图像处理模块从图像中获取参数信息可以是能够表征图片的位置变化的参数,例如坐标等,本技术对此不作限制。另外,第一相机1和第二相机2之间的距离可设置为人眼的瞳距,例如6cm,模拟左眼和右眼,而第一相机1和第二相机2相对于测试图像3之间的距离,可根据需要测试的xr设备的第一镜片4和第二镜片5的成像的虚像距离进行设置,例如2m或者4m等,实现模拟人眼的效果,提高测试系统的测试准确型,本技术对此不做限制。
51.优选地,第一相机1和第二相机2可以采用工业相机,工业相机具有长续航能力,且拍摄的图片清晰度高,应用于测量系统中能够提高其测量的准确性和便利性。
52.在采用上述测试系统对xr设备的双目融合度进行测量时,可通过以下方式进行:
53.第一步:对测试系统进行校准,即通过第一相机1和第二相机2分别对测试图像3进行拍照,得到第一图像31和第二图像32。其中,第一相机1和第二相机2之间的距离可设置为人眼的瞳距并通过图像处理模块获取和分析第一图像31和第二图像32的参数信息,通过分析结果进一步调整第一相机1和第二相机2的姿态以模拟人眼,提高测试系统的准确性。
54.第二步:将xr设备开启并放置在第一相机1和第二相机2的物侧,使第一相机1可以拍摄到第一镜片4中形成的第一虚像41得到第三图像42;以及使第二相机2可以拍摄到第二镜片5中形成的第二虚像51得到第四图像52。
55.其中,第一镜片4相对于第一相机1的距离,以及第二镜片5相对于第二相机2之间的距离可参考xr设备佩戴在人体的头部以后,第一镜片4和第二镜片5与对应的人眼之间的距离,进一步提高测量结果的准确性。
56.第三步:通过图像处理模块获取第三图像42和第四图像52的参数信息,并与第一图像31和第二图像32的参数信息进行比对,根据比对结果判定被测量的xr设备的双目融合度,即第一镜片4和第二镜片5的融合度。
57.在上述测量过程中,最终对于xr设备的双目融合度的判定方式可以根据图像处理模块获取的参数信息进行选择。例如,在一种实施例中,图像处理模块可以通过直接获取或间接计算出第三图像42相对于第一图像31的偏移量和旋转量以及第四图像52相对于第二图像32的偏移量和旋转量等信息参数,最终判定被测量设备的双目融合度。
58.本测量系统的测量原理为:测试图像3为一画质良好的图片,其图案等信息均能够清晰、完整地传达至人眼。而第一相机1和第二相机2分别模拟左眼和右眼,对测试图像3进行拍照,获得的第一图像31和第二图像32即为双目融合度良好的图片,即可以用这两张图片作为后续测量的对比基础。在测量xr设备时,将其放置在第一相机1和第二相机2的物侧,且第一镜片4到第一相机1的距离以及第二镜片5到第二镜片5之间的距离等于xr设备佩戴在人眼时的距离,即可以模拟xr设备的使用状态。通过第一相机1拍摄第一镜片4形成的第一虚像41得到第三图像42,通过第二相机2拍摄第二镜片5形成的第二虚像51得到第四图像52,而第三图像42对应于第一图像31,第四图像52对应于第二图像32,分别对其进行对比,
如果位置相同,即说明xr设备的第一镜片4和第二镜片5形成的虚像可以达到测试图像3的显示效果,即说明其融合度好,而如果位置偏差较大,说明xr设备的第一镜片4和第二镜片5形成的虚像显示效果较差,例如表现为图像不清晰,有重影等问题。据此,便可以对xr设备进行进一步调试,直至融合度合格。
59.本技术提供的上述双目融合度测量系统结构简单,测量准确,能够对xr设备的双目融合度进行测量,根据测量结果可筛选出双目融合度合格的产品,提高了用户体验,降低了制造成本。
60.可选地,参考图1至图3所示,所述测试图像3为棋盘格。
61.具体地,棋盘格即为一种黑白交替的类似于棋盘的方格图案,其图片信息简单,在实际测量过程中,便于选取特征点或特征部分进行对比分析,降低了测量系统的测量难度。在一种实施例中,可以选取四
×
四形式的图案,将棋盘格的方格交点处为特征点,通过对比特征点或由特征点组成的线条、图案等的变化,来辅助测量。
62.可选地,所述棋盘格的远离于所述第一相机1和所述第二相机2的一侧背设有光源。
63.具体地,在本实施例中,棋盘格作为测试图像3,需要具有一定的清晰度和画质,在棋盘格的背面设置光源,可以使图案显示更加清晰,便于第一相机1和第二相机2拍摄出更加清晰的照片,以提高测量系统的准确性。在一种实施例中,棋盘格可以采用与图像处理模块的显示器进行显示,便于同时对测试图像3进行调整。
64.根据本技术的第二方面,参考图1至图4,提供了一种双目融合度的测量方法,包括:
65.s01:对第一方面所述的双目融合度的测量系统进行校准,使所述第一相机1和所述第二相机2的姿态保持一致。
66.在本步骤中,参考图1,对测量系统的校准,可以提高最终测量结果的准确性,通常情况下,用户的双眼视物的效果是一致的,因而将第一相机1和第二相机2的姿态保持一致,可实现模拟人眼的状态。在一种实施例中,可以将测试图像3设置为垂直于水平面,并平行于第一相机1和第二相机2的镜头设置,而第一相机1和第二相机2之间的距离为用户的瞳距,并将第一相机1和第二相机2水平平行设置,尽量保证两个相机的姿态一致。具体的校准方法可以根据实际情况进行选择,本技术对此不作限制。
67.s02:参考图1,通过所述第一相机1对所述测试图像3进行拍照得到第一图像31,获取所述第一图像31的参数记为第一校准参数;以及,通过所述第二相机2对所述测试图像3进行拍照得到第二图像32,获取所述第二图像32的参数记为第二校准参数。
68.在本步骤中,测试图像3选择棋盘格的图案,校准后的测试系统通过第一相机1拍摄到第一图像31,通过第二相机2拍摄到第二图像32。即第一图像31和第二图像32的参数信息即为最终的对比标准。其中,第一校准参数和第二校准参数可以是能够表达其位置坐标的参数信息,例如某个点的坐标参数,或者某个线段的倾斜角度等,本技术对此不作限制。
69.s03:参考图2,使所述第一镜片4在所述第一相机1的物侧形成第一虚像41,以及使所述第二镜片5在所述第二相机2的物侧形成第二虚像51,所述第一虚像41和所述第二虚像51与所述测试图像3相同。
70.在本步骤中,xr设备的第一镜片4和第二镜片5形成的虚像与测试图像3相同,即测
试图像3的图案信息、色彩信息、位置信息等均与形成的虚像相同。其中,测试图像3所在平面与两个相机之间的水平距离可根据xr设备形成的虚像距离设置一致,以完全模拟人眼的佩戴效果。
71.s04:参考图2,通过所述第一相机1对所述第一虚像41进行拍照得到第三图像42,获取所述第三图像42的参数记为第一测量参数;以及,通过所述第二相机2对所述第二虚像51进行拍照得到第四图像52,获取所述第四图像52的参数记为第二测量参数。
72.在本步骤中,第一相机1和第二相机2获得的第三图像42和第四图像52可传输至图像处理模块,通过图像处理模块分别获取第一测量参数和第二测量参数。其中,第一测量参数与第一校准参数相对应,第二测量参数与第二校准参数相对应,以提供数据的可对比性。图像处理模块可以选择电脑等设备实现,本技术对此不作限制。
73.s05:分别对比所述第一校准参数与所述第一测量参数,以及所述第二校准参数与所述第二测量参数,根据对比结果判定所述xr设备的双目融合度。
74.在本步骤中,主要可以依靠图像处理模块完成,也可以通过人工辅助计算完成,具体根据获取的参数信息的类型进行选择。具体来说,根据第一校准参数和第一测量参数的偏差量的大小以及第二校准参数和第二测量参数的偏差量的大小便可判定xr设备的第一镜片4和第二镜片5的双目融合度。一般来说,偏差量越小,说明融合度越好。本技术提供的双目融合度的测量方法的测量过程简单、易操作,并且具有对测量系统的校正步骤,使得测量结果更加准确,进一步降低了测量成本。
75.具体地,在本实施例中,提供的双目融合度的测量方法可基于本技术第一方面提供的双目融合度的测量系统进行实现。以下对上述方法进行具体阐述,以说明本方法的技术效果。
76.可选地,参考图2,所述第一镜片4到所述第一相机1之间的距离等于所述第一镜片4到人眼的佩戴距离;以及,所述第二镜片5到所述第二相机2之间的距离等于所述第二镜片5到人眼的佩戴距离。
77.具体地,xr设备分别与第一相机1和第二相机2之间的距离参考,可以模拟佩戴在人眼时的使用状态,进一步提高测量的准确性。
78.可选地,参考图1和图3,对所述双目融合度的测量系统进行校准,包括:
79.在所述测试图像3上选取第一参考点和第二参考点,所述第一参考点和所述第二参考点所在的直线为参考直线。
80.具体地,在测试图像3上选取参考点有利于将整个图像的位置变化等价为点线的位置变化,简化了校正步骤。在一种实施例中,测试图像3为棋盘格形式的图案,第一参考点和第二参考点均可以选取棋盘格的焦点,如图3所示,为一四
×
四的棋盘格,第一参考点p选择棋盘格中位于上下方向上的中间位置处,并在左右方向上靠左,第二参考点q选择棋盘格中上下方向上的中间位置处,并在左右方向上靠右,则p和q的连线所在的直线即为参考直线。选择处于图案中心位置处的交点,便于获取其位置信息。
81.所述第一校准参数包括所述第一参考点和所述第二参考点在所述第一图像31中的坐标,通过坐标计算所述参考直线与x轴在所述第一图像31中的夹角,并记为第一夹角。所述第二校准参数包括所述第一参考点和所述第二参考点在所述第二图像32中的坐标,通过坐标计算所述参考直线与x轴在所述第二图像32中的夹角,并记为第二夹角。
82.获取第一参考点p和第二参考点q分别在第一图像31和第二图像32中的坐标参数,以便于计算参考直线在其所在的图像中与x轴(水平方向)的夹角,而夹角的大小即可对应表征出第一相机1和第二相机2是否放置水平,有利于后续的测量对比。
83.第一夹角或第二夹角的计算可以根据三角函数进行计算。例如,在第一图像31中,第一参考点p的坐标为(p
x
,py),第二参考点q的坐标为(q
x
,qy),则可以确定出参考直线pq的坐标为:(δx,δy),设第一夹角为α,其中:
84.δx=p
x
–qx δy=py–
qy;
85.则:
[0086][0087]
根据上述计算方式计算出α的大小,同理计算出第二相机2的第二夹角。
[0088]
分别调整所述第一相机1和所述第二相机2的姿态,使所述第一夹角和第二夹角为预定角度值。
[0089]
在实际应用中,可以根据上述方式计算的第一夹角和第二夹角的大小,使其达到预定角度值,例如,分别调整第一相机1和第二相机2的姿态,使第一夹角和第二夹角的角度值等于或接近于0
°
,即可保证第一相机1和第二相机2的姿态一致,模拟人眼的状态。
[0090]
可选地,所述预定角度值的取值范围为0
°
~0.8
°
。
[0091]
具体地,在对测量系统实际的校正过程中,第一相机1和第二相机2的姿态需调整至一致的状态,则第一夹角和第二夹角需尽可能地调整至一致的角度,然而在实际操作中,会有操作误差,因而第一夹角和第二夹角得角度值可以调整至0
°
~0.8
°
得范围内即可,一方面实现了对测量系统校正得目的,保证了后续测量得准确性,另一方面也节省了操作成本。优选地,预定角度值为0.3
°
~0.5
°
。
[0092]
可选地,参考图4,判定所述xr设备的双目融合度时,包括:
[0093]
所述第一测量参数包括所述第一参考点和所述第二参考点在所述第三图像42中的坐标,通过坐标计算所述第三图像42相对于所述第一图像31的旋转角度和偏移量,并记为第一旋转角度和第一偏移量,而第一旋转角度和第一偏移量,可以表征出第一镜片4形成的第一虚像41的实际位置与理论位置的偏差大小。所述第二测量参数包括所述第一参考点和所述第二参考点在所述第四图像52中的坐标,通过坐标计算所述第四图像52相对于所述第二图像32的旋转角度和偏移量,并记为第二旋转角度和第二偏移量,第二旋转角度和第二偏移量,可以表征出第二镜片5形成的第二虚像51的实际位置与理论位置的偏差大小。
[0094]
通过所述第一旋转角度和所述第一偏移量的大小判定所述第一镜片4的融合度;以及,通过所述第二旋转角度和所述第二偏移量的大小判定所述第二镜片5的融合度。即,第一偏转角度和第一偏移量如果过大,则说明第一虚像41的实际位置与理论位置偏差较大,则第一镜片4的融合度较差。第二偏转角度和第二偏移量如果过大,则说明第二虚像51的实际位置与理论位置偏差较大,则第二镜片5的融合度较差。如果第一偏转角度、第一偏移量、第二偏转角度和第二偏移量均在容许的数值范围内,则说明被测量的xr设备的双目融合度好,能够满足用户的视物需求。
[0095]
可选地,参考图4,计算所述第一旋转角度和所述第二旋转角度,包括:
[0096]
通过坐标计算所述参考直线与x轴分别在所述第三图像42和所述第四图像52中的
夹角,并对应记为第三夹角和第四夹角。对所述第三夹角和所述第一夹角的角度值做差,得到所述第一旋转角度;以及,对所述第四夹角和所述第二夹角的角度值做差,得到所述第二旋转角度。其中,第一旋转角度的大小即可表征出在第三图像42中,参考直线是否相对于其在第一图像31中发生旋转,如果第一旋转角度过大,即说明第三图像42相对于第一图像31具有较大的旋转角度,则第一虚像41在与第二虚像51融合时,会出现图像不清晰等问题,如果第一旋转角度在合理的范围内,则说明第一虚像41与第二虚像51融合后,会形成画质较好的清晰图像,符合用户需求。同理,第二旋转角度的大小也可表征出第二镜片5的成像效果。
[0097]
在一种实施例中,第一旋转角度和第二旋转角度可按照以下方式进行:
[0098]
参考在上述实施例中的第一夹角的计算方式,计算出第三夹角和第四夹角,假设第一夹角为α,第三夹角为β,则第一旋转角度θ=β
–
α;同理可计算出第二旋转角度。
[0099]
可选地,参考图4,计算所述第一偏移量和所述第二偏移量包括:
[0100]
取所述第一参考点和所述第二参考点在所述参考直线上的中点,记为第三参考点,分别获取所述第三参考点在所述第一图像31、所述第二图像32、所述第三图像42和所述第四图像52中的坐标。对所述第三参考点在所述第一图像31中的坐标和在所述第三图像42中的坐标比较做差,得到所述第一偏移量;以及,对所述第三参考点在所述第二图像32中的坐标和在所述第四图像52中的坐标比较做差,得到所述第二偏移量。
[0101]
在本实施例中,第三图像42相对于第一图像31的偏移量,以及第四图像52相对于第二图像32的偏移量均通过第三参考点的偏移量进行表征。如图3所示,在一种实施例中,取第一参考点p和第二参考点q的中点为第三参考点s,则第三参考点在第三图像42中的坐标减去其在第一图像31中的坐标,即为第一偏移量,同理可计算出第二偏移量。通过上述方式将图像的偏移量采用第三参考点的偏移量进行表征,降低了计算难度,且对比结果准确。
[0102]
上文实施例中重点描述的是各个实施例之间的不同,各个实施例之间不同的优化特征只要不矛盾,均可以组合形成更优的实施例,考虑到行文简洁,在此则不再赘述。
[0103]
虽然已经通过例子对本技术的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本技术的范围。本领域的技术人员应该理解,可在不脱离本技术的范围和精神的情况下,对以上实施例进行修改。本技术的范围由所附权利要求来限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。