1.本实用新型涉及汽车制造技术领域,具体来讲是一种白车身螺母自动焊接工作站。
背景技术:
2.白车身焊接生产中需要焊接大量的螺母,若依靠人工焊接则效率低下且容易出错。因此,亟需一种能够实现白车身螺母自动焊接的装置。
技术实现要素:
3.针对现有技术中存在的缺陷,本实用新型的目的在于提供一种白车身螺母自动焊接工作站,极大的提高了白车身生产过程中螺母焊接的效率和准确性。
4.为达到以上目的,本实用新型采取的技术方案是:一种白车身螺母自动焊接工作站,包括基座底板,所述基座底板上设置有螺母焊接机构和机器人,还包括与机器人连接的抓手机构,所述抓手机构包括支架、换枪盘、定位夹紧机构和检测机构;所述换枪盘的一侧与机器人连接,换枪盘的另一侧通过连接座与支架连接;所述定位夹紧机构通过连接件与支架连接,用于夹紧固定零件;所述检测机构通过连接件与支架连接,用于检测零件是否到位。
5.进一步改进在于:所述检测机构包括第一气缸、感应器和定位销;所述第一气缸的缸体与连接件相连,第一气缸的活塞杆连接有安装板;所述感应器和定位销分别与安装板连接。
6.进一步改进在于:所述定位夹紧机构包括固定座、固定夹臂、活动夹臂和第二气缸;所述固定座与连接件固定相连;所述固定夹臂与固定座固定连接;所述活动夹臂与固定座铰接;所述第二气缸的缸体与固定座连接,第二气缸的活塞杆与活动夹臂连接,用于带动活动夹臂与固定夹臂相对运动。
7.进一步改进在于:所述支架上设置有阀岛,阀岛的下方设置有接地电极。
8.进一步改进在于:所述机器人包括旋转底座、转臂和支撑臂;所述旋转底座设置在基座底板上,所述转臂的下端与旋转底座连接,转臂的上端与支撑臂的一端连接,支撑臂的另一端与抓手机构连接。
9.进一步改进在于:所述螺母焊接机构包括本体和焊枪,所述焊枪通过调节臂与本体连接。
10.进一步改进在于:所述基座底板上设置有电柜和零件放置台。
11.进一步改进在于:所述基座底板四周设置有围栏,基座底板上设置有管线护板。
12.进一步改进在于:所述围栏与零件放置台相对的位置设置有开口,开口处设置有安全光栅。
13.本实用新型的有益效果在于:
14.本实用新型中,零件放置台上有对应的定位可以将零件定位至正确位置,机器人
抓手抓取零件后放入设定的焊接位置,由螺母自动焊机进行焊接操作。焊接完成后放回零件放置台,平台退出零件取走。这样极大的提高了白车身生产过程中螺母焊接的效率和准确性。
附图说明
15.图1为本实用新型实施例中白车身螺母自动焊接工作站的结构示意图;
16.图2为本实用新型实施例中机器人和抓手机构的结构示意图;
17.图3为本实用新型实施例中抓手机构的结构示意图;
18.图4为本实用新型实施例中检测机构的结构示意图;
19.图5为本实用新型实施例中定位夹紧机构的结构示意图;
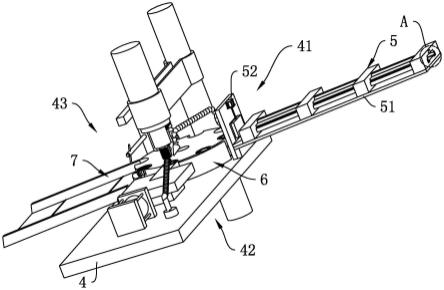
20.图6为本实用新型实施例中螺母焊接机构的结构示意图。
21.附图标记:
22.1-基座底板;11-管线护板;12-围栏;13-安全光栅;
23.2-机器人;21-旋转底座;22-转臂;23-支撑臂;
24.3-抓手机构;31-支架;32-换枪盘;33-连接座;34-阀岛;35-接地电极;36-连接件;37-检测机构;3701-第一气缸;3702-安装板;3703-感应器;3704-定位销;38-定位夹紧机构;3801-固定座;3802-第二气缸;3803-固定夹臂;3804-活动夹臂;
25.4-螺母焊接机构;41-本体;42-调节臂;43-焊枪;
26.5-电柜;
27.6-零件放置台。
具体实施方式
28.下面详细描述本实用新型的实施例,所述的实施例示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。
29.在本实用新型的描述中,需要说明的是,对于方位词,如有术语“中心”,“横向(x)”、“纵向(y)”、“竖向(z)”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示方位和位置关系为基于附图所示的方位或位置关系,仅是为了便于叙述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,不能理解为限制本实用新型的具体保护范围。
30.此外,如有术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明技术特征的数量。由此,限定有“第一”、“第二”特征可以明示或者隐含包括一个或者多个该特征,在本实用新型描述中,“数个”、“若干”的含义是两个或两个以上,除非另有明确具体的限定。
31.下面结合说明书的附图,通过对本实用新型的具体实施方式作进一步的描述,使本实用新型的技术方案及其有益效果更加清楚、明确。下面通过参考附图描述实施例是示例性的,旨在解释本实用新型,而不能理解为对本实用新型的限制。
32.参见图1所示,本实用新型实施例提供一种白车身螺母自动焊接工作站,包括基座底板1,基座底板1上设置有螺母焊接机构4和机器人2,还包括与机器人2连接的抓手机构3,
具体的,基座底板1上设置有电柜5和零件放置台6。基座底板1四周设置有围栏12,基座底板1上设置有管线护板11。围栏12与零件放置台6相对的位置设置有开口,开口处设置有安全光栅13。
33.参见图3所示,抓手机构3包括支架31、换枪盘32、定位夹紧机构38和检测机构37;换枪盘32的一侧与机器人2连接,换枪盘32的另一侧通过连接座33与支架31连接;定位夹紧机构38通过连接件36与支架31连接,用于夹紧固定零件;检测机构37通过连接件36与支架31连接,用于检测零件是否到位。具体的,支架31上设置有阀岛34,阀岛34的下方设置有接地电极35。
34.参见图4所示,检测机构37包括第一气缸3701、感应器3703和定位销3704;第一气缸3701的缸体与连接件36相连,第一气缸3701的活塞杆连接有安装板3702;感应器3703和定位销3704分别与安装板3702连接。
35.参见图5所示,定位夹紧机构38包括固定座3801、固定夹臂3803、活动夹臂3804和第二气缸3802;固定座3801与连接件36固定相连;固定夹臂3803与固定座3801固定连接;活动夹臂3804与固定座3801铰接;第二气缸3802的缸体与固定座3801连接,第二气缸3802的活塞杆与活动夹臂3804连接,用于带动活动夹臂3804与固定夹臂3803相对运动。
36.参见图2所示,机器人2包括旋转底座21、转臂22和支撑臂23;旋转底座21设置在基座底板1上,转臂22的下端与旋转底座21连接,转臂22的上端与支撑臂23的一端连接,支撑臂23的另一端与抓手机构3连接。
37.参见图6所示,螺母焊接机构4包括本体41和焊枪43,焊枪43通过调节臂42与本体41连接。
38.在说明书的描述中,参考术语“一个实施例”、“优选地”、“示例”、“具体示例”或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点,包含于本实用新型的至少一个实施例或示例中,在本说明书中对于上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或者示例中以合适方式结合。
39.通过上述的结构和原理的描述,所属技术领域的技术人员应当理解,本实用新型不局限于上述的具体实施方式,在本实用新型基础上采用本领域公知技术的改进和替代均落在本实用新型的保护范围,应由各权利要求限定之。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。