1.本发明涉及探针的制备加工技术领域,是一种可远程操作在高倍光学显微镜下于悬臂粘接微粒以制备胶体探针的方法。
背景技术:
2.原子力显微镜(afm)可通过将颗粒固定在悬臂末端直接测量颗粒与样品表面之间的粘附力,这种技术大力推动了分子间力的测量。常规探针是由悬臂和针尖组成,针尖位于悬臂的自由端,用于感知针尖和样品之间的相互作用;悬臂通常是由一个100-500μm长度和500nm-5μm厚的硅片制成,其形状和尺寸对于分辨率,测量精度有重要的影响。
3.随着技术的不断发展和成熟,制备胶体探针的方式也越来越多样,但是大多数制备胶体探针的方式缺乏连贯性,需要人工实时操作,不能远程电脑操控,从而使得制备胶体探针的实时性、精准性以及成功制备的效率降低。
技术实现要素:
4.为了解决上述问题,本发明提供了一种胶体探针制备装置及其实施方法,本装置可实现远程操作制备胶体探针,操作简便快捷,实用性强,制备的胶体探针表面光滑洁净,并可用于实验室批量制备胶体探针。
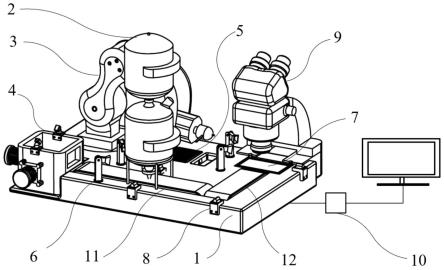
5.本发明提供一种胶体探针制备装置及其实施方法,其特征在于:包括试验台(1)、溶液配制装置(2)、机械臂(3)、清洗装置(4)、胶水池(5)、烘干装置(6)、三维微动台(7)、测控装置(8)、高倍视屏显微镜(9)、控制模块(10)、第一传送带(11)以及第二传送带(12);所述试验台(1)表面设有两条相互垂直的第一传送带(11)及第二传送带(12);在第一传送带(11)的上方设有溶液配制装置(2),在第一传送带(11)的起点处安装清洗装置(4),在第二传送带(12)末尾安装有三维微动台(7)以及高倍视屏显微镜(9),在三维微动台(7)的侧面安装有胶水池(5)以及机械臂(3),所有设备的运转由控制模块(10)进行控制驱动,在第一传送带(11)以及第二传送带(12)的周围设有测控装置(8),在第一传送带(11)以及三维微动台(7)的周围设有烘干装置(6)。
6.进一步的,所述的溶液配制装置(2)包括双通孔容量瓶(21)、三通孔容量瓶(22)、第一电动阀门(231)、第二电控阀门(232)、第一超声发生器(241)、第二超声发生器(242)、四脚环形支架(25)、玻璃滴头(26)、第一玻璃盖(271)、第二玻璃盖(272);其中双通孔容量瓶(21)与三通孔容量瓶(22)用第一电控阀门(231)连接,玻璃滴头(26)与三通孔容量瓶(22)用第二电控阀门(232)连接,双通孔容量瓶(21)的上方通孔安装有第一玻璃盖(271),三通孔容量瓶(22)的侧方通孔安装有第二玻璃盖(272),四脚环形支架(25)与三通孔容量瓶(22)瓶体连接,第一超声发生装置(241)与双通孔容量瓶(21)的瓶身所连接,第二超声发生器(242)与三通孔容量瓶(22)瓶身所连接。
7.进一步的,所述的机械臂(3)包括基座(31)、第一机械臂(32)、第二机械臂(33)、第三机械臂(34)、第四机械臂(35)以及探针夹具装置(36);所述第一机械臂(32)、第二机械臂
(33)、第三机械臂(34)和第四机械臂(35)组合后能实现多种自由度运动,探针夹具装置(36)实现探针的固定以及更换;所述第一机械臂(32)设置在所述基座(31)上,第二机械臂(33)和第三机械臂(34)活动连接,第三机械臂(34)和第四机械臂(35)活动连接,探针夹具装置(36)设置在第四机械臂(35)上;所述探针夹具装置(36)包括推杆(361)、丝杆滑轨(362)、活动卡扣(363)和探针匣(364);所述探针匣(364)安装在丝杆滑轨(362)上方,匣体活动由滑轨所控制,活动卡扣(363)安装在探针夹具装置(36)的前端,被用于固定探针,推杆(361)安装在探针夹具装置(36)的尾部用于将探针推出探针匣(364)。
8.进一步的,所述的清洗装置(4)包括外壳(41)、推板(42)、沥水板(43)、吹风机(44)、第一电机(451)、第二电机(452);其中外壳(41)为金属箱体,其中一面设有窗口,沥水板(43)为表面设有多微孔的金属板,安装在外壳(41)内,用第一电机(451)实现上下运动,推板(42)安装在外壳的内部侧面,垂直于沥水板(43)且用第二电机(452)完成推板(42)的前后运动,吹风机(44)安装于外壳(41)的上侧两端,用于对载玻片的烘干。
9.进一步的,所述的胶水池(5)包括划线三角块(51)、胶水补充孔(52)、添加池(53)、划线池(54);所述胶水池(5)镶嵌在试验台(1)表面,划线三角块(51)安装划线池(54)内,划线三角块(51)四周与划线池(54)都有一定距离,且划线三角块(51)表面上有相互平行且竖直的凹槽(511),划线池(54)与添加池(53)由胶水补充孔(52)联通,划线池(54)与添加池(53)位于同一水平面上且为连通器结构。
10.进一步的,当计算机输入指令时,将指令传输给控制模块(10),控制模块(10)控制各个电机或装置的运转,进而控制清洗装置(4)、第一电控阀门(231)、第二电控阀门(232)、第一传送带(11)、第二传送带(12)的启动以及关闭、机械臂(3)的运动及烘干装置(6)的启停。其中当第一传送带(11)运输载玻片接近玻璃滴头(26)时,测控装置(8)将当时所采集的光线变化传输给控制模块(10),控制模块(10)将控制第一传送带(11)是否运转,从而实现将载玻片定位到玻璃滴头(26)正下方;当载玻片从第一传送带(11)到第二传送带时,测控装置(8)将当时所采集的光线变化传输给控制模块(10),控制模块(10)将控制第二传送带(12)是否运转,当载玻片完全落入第二传送带(12)时,第二传送带(12)开始工作从而实现载玻片在第一传送带(11)、第二传送带(12)上的连续运输。
11.进一步的,所述的胶体探针制备装置及其实施方法步骤如下:
12.s1,将多块载玻片放入清洗装置(4)中,且加入清洗液,将所需颗粒溶液与清洗溶液放入双通孔容量瓶(21)中,将稀释液放入三通孔容量瓶(22)中;
13.s2,电脑输入命令,命令传送给控制模块(10),控制模块(10)将装置激活,随后清洗装置(4)启动,清洗载玻片,清洗完毕后,沥水板(43)与推板(42)一同上升,将载玻片从清洗液脱离出来且静止一段时间后,位于顶部的吹风机(44)开始工作,当吹风机(44)停止工作后,载玻片将为干燥状态,推板(42)将推动载玻片到第一传送带(11)上;
14.s3,当载破片落入第一传送带上后,第一传送带(11)开始运动,当载玻片快到玻璃滴头的正下时,测控装置(8)将光线变化的数据传输给控制模块(10),控制模块(10)将控制第一传送带(11)把载玻片定位到玻璃滴头(26)的正下方;
15.s4,溶液配制装置(2)由控制模块(10)所控制且与清洗装置同时工作,首先溶液配制装置(2)的第一超声发生装置(241)开始工作,清洗双通孔容量瓶(21)内的溶液,清洗完毕后控制第一电控阀门(231)打开,溶液将落入三通孔容量瓶(22)中,并与稀释液混合,第
二超声发生器(242)开始工作,溶液被稀释且震动均匀后停止工作,控制第二电动阀门(232)打开,控制一定量溶液流入玻璃滴头(26),溶液经过玻璃滴头滴(26)到载玻片上,位于第一传送带(11)周围的烘干装置(6)开始工作,将载玻片上的溶液烘干;
16.s5,第一传送带(11)把载玻片传送到第二传送带(12)时,测控装置(8)将光线变化的数据传输给控制模块(10),当载玻片完全落入第二传送带(12)时,控制模块(10)将控制第二传送带(12)运动,第二传送带(12)将载玻片传送至三维微动台(7)上;
17.s6,控制机械臂将安装探针,控制机械臂(3)用悬臂前方的探针在胶水池(5)中的凹槽(511)中蘸取胶水,控制机械臂(3)使其探针悬停在载玻片上方,控制三维微动台(7)和机械臂(3)在高倍视屏显微镜(9)下,蘸取微粒,启动烘干装置(6),使其微粒充分结合在探针底部,在高倍视屏显微镜(9)确认胶体探针是否制备成功;
18.s7,如果胶体探针制备不成功,将打开活动卡扣(363),将推杆(361)探针推出,探针退出后,活动卡扣(363)将复位,丝杆滑轨(362)将把探针匣(364)移动一个探针的距离,推杆(361)将探针推出,重复s6步骤直到确认胶体探针制备成功。
19.作为优选,清洗液最好为乙醇或者甲醇,所颗粒需溶液最好为微球粒径范围在10-30um的溶液,胶水池(5)中的胶水最好为可粘接微球和探针的固化时间在5-50分钟的胶水,烘干装置(6)最好为紫外线烘干或者热风烘干机器,载玻片最好为云母片,作为优选,测控装置最好为由光电传感器。
20.作为优选,第一传送带,第二传送带外层应包覆橡胶,且橡胶应有一定柔度且具有防滑纹理,增大第一传送带、第二传送带与载玻片之间的摩擦力,避免在工作时出现打滑现象。
21.本发明的有益效果为:一种胶体探针制备装置及其实施方法,可提高胶体探针制备的效率,实现了远程操控制备胶体探针,操作简便快捷,实用性强,提高了胶体探针制备的成功率。
附图说明
22.下面结合附图和实施例对本发明进一步说明:
23.图1为本发明结构示意图
24.图2为溶液配制装置结构示意图
25.图3为机械臂结构示意图
26.图4为清洗装置结构示意图
27.图5为胶水池结构示意图
28.图6为探针夹取装置内部结构示意图
29.图中:1-试验台,2-溶液配置装置,3-机械臂,4-清洗装置,5-胶水池,6-烘干装置,7-三维微动台,8-测控装置,9-高倍视屏显微镜,10-控制模块,11-第一传送带,12-第二传送带,21-双通孔容量瓶、22-三通孔容量瓶、231-第一电控阀门、232-第二电控阀门、241-第一超声发生器、242-第二超声发生器、25-四脚环形支架、26-玻璃滴头、271-第一玻璃盖、272-第二玻璃盖、31-基座、32-第一机械臂、33-第二机械臂、34-第三机械臂、35-第四机械臂、36-探针夹具装置,361-推杆、362-丝杆滑轨、363-活动卡扣、364-探针匣,41-外壳、42-推板、43-沥水板、44-吹风机、451-第一电机、452-第二电机、51-划线三角块、52-胶水补充
孔、53-添加池,54-划线池,511-凹槽。
具体实施方案
30.具体实施方案如下:
31.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
32.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
33.本发明提供一种胶体探针制备装置及其实施方法,其特征在于:包括试验台1、溶液配制装置2、机械臂3、清洗装置4、胶水池5、烘干装置6、三维微动台7、测控装置8、高倍视屏显微镜9、控制模块10、第一传送带11以及第二传送带12;
34.所述试验台1表面设有两条相互垂直的第一传送带11及第二传送带12;在第一传送带11的上方设有溶液配制装置2,在第一传送带11的起点处安装清洗装置4,在第二传送带12末尾安装有三维微动台7以及高倍视屏显微镜9,在三维微动台7的侧面安装有胶水池5以及机械臂3,所有设备的运转由控制模块10进行控制驱动,在第一传送带11以及第二传送带12的周围设有测控装置8,在第一传送带11以及三维微动台7的周围设有烘干装置6。
35.所述的一种胶体探针制备装置,其特征在于:所述的溶液配制装置2包括双通孔容量瓶21、三通孔容量瓶22、第一电动阀门231、第二电控阀门232、第一超声发生器241、第二超声发生器242、四脚环形支架25、玻璃滴头26、第一玻璃盖271、第二玻璃盖272;其中双通孔容量瓶21与三通孔容量瓶22用第一电控阀门231连接,玻璃滴头26与三通孔容量瓶22用第二电控阀门232连接,双通孔容量瓶21的上方通孔安装有第一玻璃盖271,三通孔容量瓶22的侧方通孔安装有第二玻璃盖272,四脚环形支架25与三通孔容量瓶22瓶体连接,第一超声发生装置241与双通孔容量瓶21的瓶身所连接,第二超声发生器242与三通孔容量瓶22瓶身所连接。
36.所述的一种胶体探针制备装置,其特征在于:所述的机械臂3包括基座31、第一机械臂32、第二机械臂33、第三机械臂34、第四机械臂35以及探针夹具装置36;所述第一机械臂32、第二机械臂33、第三机械臂34和第四机械臂35组合后能实现多种自由度运动,探针夹具装置36实现探针的固定以及更换;所述第一机械臂32设置在所述基座31上,第二机械臂33和第三机械臂34活动连接,第三机械臂34和第四机械臂35活动连接,探针夹具装置36设置在第四机械臂35上;所述探针夹具装置36包括推杆361、丝杆滑轨362、活动卡扣363和探针匣364;所述探针匣364安装在丝杆滑轨362上方,匣体活动由滑轨所控制,活动卡扣363安装在探针夹具装置36的前端,被用于固定探针,推杆361安装在探针夹具装置36的尾部用于将探针推出探针匣364。
37.所述的一种胶体探针制备装置,其特征在于:所述的清洗装置4包括外壳41、推板42、沥水板43、吹风机44、第一电机451、第二电机452;其中外壳41为金属箱体,其中一面设有窗口,沥水板43为表面设有多微孔的金属板,安装在外壳41内,用第一电机451实现上下运动,推板42安装在外壳的内部侧面,垂直于沥水板43且用第二电机452完成推板42的前后运动,吹风机44安装于外壳41的上侧两端,用于对载玻片的烘干。
38.所述的一种胶体探针制备装置,其特征在于:所述的胶水池5包括划线三角块51、
胶水补充孔52、添加池53、划线池54;所述胶水池5镶嵌在试验台1表面,划线三角块51安装划线池54内,划线三角块51四周与划线池54都有一定距离,且划线三角块51表面上有相互平行且竖直的凹槽511,划线池54与添加池53由胶水补充孔52联通,划线池54与添加池53位于同一水平面上且为连通器结构。
39.所述的一种胶体探针制备装置,其特征在于:当计算机输入指令时,将指令传输给控制模块10,控制模块10控制各个电机或装置的运转,进而控制清洗装置4、第一电控阀门231、第二电控阀门232、第一传送带11、第二传送带12的启动以及关闭、机械臂3的运动及烘干装置6的启停。其中当第一传送带11运输载玻片接近玻璃滴头26时,测控装置8将当时所采集的光线变化传输给控制模块10,控制模块10将控制第一传送带11是否运转,从而实现将载玻片定位到玻璃滴头26正下方;当载玻片从第一传送带11到第二传送带时,测控装置8将当时所采集的光线变化传输给控制模块10,控制模块10将控制第二传送带12是否运转,当载玻片完全落入第二传送带12时,第二传送带12开始工作从而实现载玻片在第一传送带11、第二传送带12上的连续运输。
40.所述的胶体探针制备装置及其实施方法步骤如下:
41.s1,将多块载玻片放入清洗装置4中,且加入清洗液,将所需颗粒溶液与清洗溶液放入双通孔容量瓶21中,将稀释液放入三通孔容量瓶22中;
42.s2,电脑输入命令,命令传送给控制模块10,控制模块10将装置激活,随后清洗装置4启动,清洗载玻片,清洗完毕后,沥水板43与推板42一同上升,将载玻片从清洗液脱离出来且静止一段时间后,位于顶部的吹风机44开始工作,当吹风机44停止工作后,载玻片将为干燥状态,推板42将推动载玻片到第一传送带11上;
43.s3,当载破片落入第一传送带上后,第一传送带11开始运动,当载玻片快到玻璃滴头的正下时,测控装置8将光线变化的数据传输给控制模块10,控制模块10将控制第一传送带11把载玻片定位到玻璃滴头26的正下方;
44.s4,溶液配制装置2由控制模块10所控制且与清洗装置同时工作,首先溶液配制装置2的第一超声发生装置241开始工作,清洗双通孔容量瓶21内的溶液,清洗完毕后控制第一电控阀门231打开,溶液将落入三通孔容量瓶22中,并与稀释液混合,第二超声发生器242开始工作,溶液被稀释且震动均匀后停止工作,控制第二电动阀门232打开,控制一定量溶液流入玻璃滴头26,溶液经过玻璃滴头滴26到载玻片上,位于第一传送带11周围的烘干装置6开始工作,将载玻片上的溶液烘干;
45.s5,第一传送带11把载玻片传送到第二传送带12时,测控装置(8)将光线变化的数据传输给控制模块10,当载玻片完全落入第二传送带12时,控制模块10将控制第二传送带12运动,第二传送带12将载玻片传送至三维微动台7上;
46.s6,控制机械臂将安装探针,控制机械臂3用悬臂前方的探针在胶水池5中的凹槽511中蘸取胶水,控制机械臂3使其探针悬停在载玻片上方,控制三维微动台7和机械臂3在高倍视屏显微镜9下,蘸取微粒,启动烘干装置6,使其微粒充分结合在探针底部,在高倍视屏显微镜9确认胶体探针是否制备成功;
47.s7,如果不成功胶体探针制备不成功,将打开活动卡扣363,将推杆361探针推出,探针退出后,活动卡扣363将复位,丝杆滑轨362将把探针匣364移动一个探针的距离,推杆361将探针推出,重复s6步骤直到确认胶体探针制备成功。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。