1.本技术设计了一种用于室内无人飞艇的矢量推进装置,涉及矢量推进倾转装置领域和飞行器设计领域,尤其涉及用于飞艇的矢量推进倾转装置领域。
背景技术:
2.飞艇是利用空气浮力升空,通过操纵其动力推进装置进行控制的航空器。飞艇的主要结构包括充满气体的艇体、搭载有效载荷的吊舱、动力推进装置及稳定姿态的安定面等。动力推进装置作为飞艇的关键技术设备,为飞艇浮空飞行、移动、转向等动作提供推进动力,是飞艇安全稳定运行的重要保障。传统飞艇的推进装置主要分为三种:安装在两侧的定桨距螺旋桨推进器、两侧或尾部布局的可变距螺旋桨推进器及采用推力转向和涵道螺旋桨的矢量推进装置。
3.早期的大型硬式、半硬式氢气飞艇多采用定桨距螺旋桨推进器,只能通过改变螺旋桨转速为飞艇提供不同大小的前向推力,推动飞艇前进。各种中小体积软式飞艇和大型半硬式飞艇多采用可变距螺旋桨推进器,能在飞艇高度和速度变化时提供更好的推进效率。这两种推进形式的飞艇均由舵面控制方向,推进器提供足够的前向速度时通过调节舵面实现上升、下降及左右偏转动作,存在较大的转弯半径。现代常规的中低空飞艇一般采用矢量推进装置,可分为发动机倾转和发动机不倾转两种类型,发动机不倾转的矢量推进装置通过各螺旋桨的差速提供矢量推力,发动机倾转的矢量推进装置倾转方向为俯仰方向,推进方向为上下及前后,通过倾转及差速提供矢量推力,使飞艇在低速工况的偏航和转向控制更精准,但依然存在较大转弯半径,不适宜室内有限空间中飞行。
4.目前,能提供上下、前后、左右及偏航方向推力,实现有限空间内飞行的飞艇矢量推进装置大致有以下几种结构形式:一是分布在艇囊周围的多个螺旋桨,形成类多旋翼结构,通过差动提供全向矢量推力,安装和控制较为简单,但整体尺寸较大,控制效率低;二是分布在艇囊两侧的两轴连杆形式倾转结构,通过控制分配使两侧的两轴实现不同倾转角度,从而提供全向矢量推力,但连杆倾转引起重心及推力作用点变化,飞艇的质量特性变化,对连杆结构强度和伺服机构的负载要求很高。
技术实现要素:
5.本技术的目的是提供一种用于室内无人飞艇的稳定可靠的多矢量推进装置,使飞艇在室内有限空间中灵活地实现前进、后退、上升、下降、向左平飞、向右平飞、左转、右转等飞行动作。
6.根据本技术的第一方面,提供了一种矢量推进装置,包括用于连接到被推进的飞艇的固定结构杆件与矢量推进装置倾转机构;所述矢量推进装置倾转机构包括第一倾转机构、第二倾转机构与推进机构;所述第一倾转机构包括航向轴倾转圆环与第一舵机,所述固定结构杆件连接所述第一舵机,所述圆环所述第一舵机连接,所述第一舵机能够驱动所述第一倾转机构旋转;所述第二倾转机构包括第二舵机与框形结构,所述第二舵机固定于所
述航向轴倾转圆环,所述第二舵机能够驱动所述第二倾转机构绕所述航向轴倾转圆环的直径旋转,所述直径经过所述第二舵机;所述推进机构固定于所述第二倾转机构的框型结构。
7.根据本技术的第二方面,提供了一种多矢量推进装置组件,包括第一矢量推进装置、第二矢量推进装置与第三矢量推进装置;所述第一矢量推进装置、所述第二矢量推进装置与所述第三矢量推进装置分别是根据根据本技术第一方面所述的矢量推进装置;所述第一矢量推进装置与第二矢量推进装置各自的固定结构杆件所在的直线重合;所述第三矢量推进装置的固定结构杆件与第一矢量推进装置或第二矢量推进装置各自的固定结构杆件所在的直线垂直。
8.根据本技术的第三方面,提供了一种飞艇,包括艇囊与多矢量推进装置组件;所述多矢量推进装置组件位于所述艇囊下方;所述多矢量推进装置组件是根据本技术第二方面所述的多矢量推进装置组件。
9.本技术的技术方案为:一种矢量推进装置,包括分布在飞艇艇囊外部的三个两轴倾转机构及推进机构,其中每个两轴倾转机构为类云台结构形式,从飞艇艇体由内向外分别为圆环形的航向轴倾转结构和框形的俯仰轴倾转结构。倾转机构包括各结构件、伺服电机和轴承等,俯仰轴框形结构中间连接推进机构,推进机构包括电机及螺旋桨。航向轴倾转结构绕圆环的竖直轴线旋转,框形俯仰轴结构绕该圆环的水平轴线旋转,倾转结构一端由伺服电机带动倾转,另一端由轴承进行连接,增加结构强度,并减小对伺服电机的负载。推进机构的电机安装在框形结构的底侧横杆上,使得两轴倾转结构旋转时,电机和螺旋桨始终位于圆环中心,推进机构的空间位置不变,即螺旋桨的推力作用点基本不变。两轴倾转结构的伺服电机均可提供
±
180
°
的旋转,通过对三套推进装置共六个倾转角度、三个推力的控制分配,即可实现全向移动。比如,飞艇上升时,三套推进装置均垂直向上,提供垂直向下的推力;飞艇前进时,三套推进装置水平均朝向前方,提供向后的推力,左右平飞同理;飞艇左转时,左侧推进装置向前,右侧推进装置向后,后侧推进装置向左,提供左旋合力,使飞艇原地转弯,右转同理。通过三套推进装置的配合使得飞艇能够稳定可靠地在有限的室内空间中灵活全向移动。本技术的三套矢量推进装置直接连接在飞艇艇舱骨架上,位于飞艇艇囊下方。以飞艇重心为原点,飞艇前向为x轴正方向,向右为y轴正方向,垂直向下为z轴正方向。三套推进装置的螺旋桨与飞艇重心位于同一水平面上,即与重心在z轴方向重合;位于飞艇尾部的推进装置在xz平面上,即与重心在y轴方向重合;位于飞艇左右两侧的推进装置关于xz平面对称,与y轴的距离为尾部推进装置与y轴距离的一半。该布局形式能尽可能减少矢量推进装置提供矢量推力时对飞艇产生不必要的力矩,降低控制难度。
10.本技术具有如下优点:
11.1)可为飞艇提供全向矢量推力,使得飞艇能够在较小的空间内实现前进、后退、上升、下降、向左平飞、向右平飞、左转、右转等飞行动作;
12.2)每套推进装置均采用类云台结构,结构简单紧凑,倾转时重心和质量特性基本无变化,便于飞艇的控制;
13.3)推进装置各倾转机构均采用环形或框形结构,在结构轻量化的同时保证了结构强度,且螺旋桨在环形结构内而不外露,起到安全防护作用;
14.4)除艇体提供的静升力外,矢量推进装置提供的动升力可为飞艇提供更大的载荷裕量,三套独立控制的推进装置可确保任意一个动力装置失效时仍有部分动力维持飞行;
15.5)三套推进装置配合可实现飞艇方向的控制,飞艇不需要设置舵面,艇体结构简单,且可以根据需求采用不同形状的艇囊,外形不受流线型限制;
16.6)推进装置取代了舵面控制,使得飞艇在运动时姿态不发生变化,增加了飞艇及其搭载设备的稳定性,并加快了对飞行动作的响应速度。
17.综上,本技术的多矢量推进装置具有机动性强、结构简单紧凑、便于精准控制、高效、安全、可靠、稳定等优点,可实现飞艇在室内空间内灵活的全向飞行。
附图说明
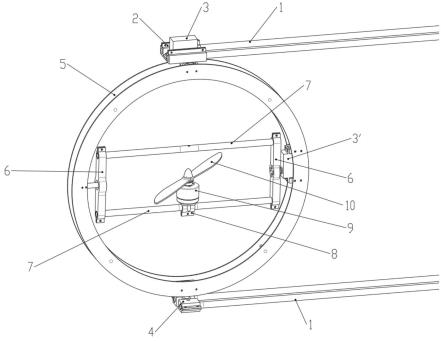
18.图1为本技术所述矢量推进装置的结构示意图。
19.图2为本技术所述用于室内无人飞艇的多矢量推进装置示意图。
具体实施方式
20.结合附图对本技术作进一步说明。
21.如图1所示,本技术的矢量推进装置具有类云台结构,包括2根固定结构杆件1与具有类云台结构的矢量推进装置倾转机构。由固定结构杆件1的第一端连接飞艇艇体骨架,而固定结构杆件1的第二端连接具有类云台结构的矢量推进装置倾转机构。一根固定结构杆件1的第二端连接舵机固定架2及舵机3。另一根固定结构杆件1的第二端连接航向轴倾转从动件4。舵机3及航向轴倾转从动件4相对并且分别连接航向轴倾转圆环5。从而在舵机3提供的动力的驱动下,航向轴倾转圆环5绕舵机3及航向轴倾转从动件4所形成的连线旋转。航向轴倾转圆环5连接俯仰轴舵机3’及俯仰轴倾转从动件6,俯仰轴倾转从动件6连接上下两根俯仰轴固定杆7。俯仰轴倾转从动件6包括2根杆,其一连接俯仰轴舵机3’,其二连接航向轴倾转圆环5。俯仰轴倾转从动件6与两根俯仰轴固定杆7形成框形结构。在俯仰轴舵机 3’提供的动力驱动下,框形结构绕航向轴倾转圆环5的经过俯仰轴舵机3’的直径旋转。一根俯仰轴固定杆7(图1中,其是位于底侧的俯仰轴固定杆7)连接推进机构。推进机构包括电机固定件8、电机9及螺旋桨10。推进机构位于俯仰轴倾转矩形框架内侧,以便为容纳推进机构提供空间并保护推进机构。
22.结构杆件1作为根据本技术实施例的矢量推进装置主体与飞艇艇体的连接件,连带舵机固定架2相对于飞艇固定不动。舵机3带动航向轴倾转圆环5及其后续序号部件(例如由附图标记6-10所指示的部件)绕舵机3和航向轴倾转从动件4的连线进行旋转。舵机3的旋转范围为
±
180
°
,因此航向轴倾转圆环5的倾转范围为
±
180
°
。舵机3、航向轴倾转从动件4 与航向轴倾转圆环5构成矢量推进装置的第一个倾转机构。
23.矢量推进装置的第二个倾转机构由定子固定在圆环5的俯仰轴舵机3’带领,俯仰轴舵机3’带动由俯仰轴倾转从动件6及俯仰轴固定杆7组成的框形结构绕圆环的水平方向轴线旋转。第二个倾转机构的倾转范围同样为
±
180
°
。第一个倾转机构与第二个倾转机构可同时或分别进行倾转。第二个倾转机构固定连接推进机构,其中电机固定件8与第二倾转机构固定并保持相对静止,其上连接电机9的定子端,电机9的转子端带动螺旋桨10进行旋转并输出动力。
24.上下两侧的固定结构杆件1分别连接位于航向轴倾转圆环两端的舵机固定架2、航向轴倾转从动件4和舵机3带动第一倾转机构倾转,分散了舵机需要承受的力和力矩,避免
了应力集中,增强了结构强度,同时可提高传动及倾转效率。第二倾转机构的框形结构形式同理,也具有以上优点。第二倾转机构的俯仰轴固定杆7连接推进机构,使得无论第一倾转机构和第二倾转机构以任何角度倾转,推进机构均位于第一倾转机构的航向轴倾转圆环5的中心位置,从而使得推进机构与飞艇艇体的相对位置不变。该结构布局使得在电机9转速一定前提下矢量推进装置在倾转运动时各结构部件承受的力和力矩大小基本无变化,提高了结构的稳定性,不需要选择大力矩的舵机(舵机3、俯仰轴舵机3’),在一定程度上减轻了系统的整体重量。该结构布局与杆件式的推进装置结构布局相比,推进机构位于倾转机构内部,即螺旋桨10 不外露于飞艇的最外端,而航向轴倾转圆环5成为飞艇的最外端,两个倾转机构本身相当于推进机构(螺旋桨)的保护架,该结构在提高了飞艇整体的安全性的同时减小了飞艇的体积,使得结构更加紧凑。
25.如图2所示,本技术的用于室内无人飞艇的多矢量推进装置包括例如三套图1所示的矢量推进装置,并安装在飞艇艇体骨架上,位于艇囊11下侧。作为举例,两套矢量推进装置(图 2的右下角)位于艇囊11前侧并关于飞艇的长轴(x轴)左右对称分布,第三套矢量推进装置位于艇囊11后侧。飞艇整体的重心位于艇囊11的升力中心正下方。以飞艇重心为原点,飞艇长轴为x轴,飞艇前向为x轴正方向。x轴与y轴位于水平面,面向x轴正方向向右为 y轴正方向,z轴沿竖直方向,垂直向下为z轴正方向。三套推进装置的螺旋桨与飞艇重心位于同一水平面上,即其z轴坐标与重心在z轴的位置重合。关于飞艇的长轴(x轴)左右对称分布的两套矢量推进装置,其各自的固定结构杆件与x轴垂直,且与y轴平行。
26.位于艇囊11尾部的矢量推进装置的固定结构杆件与x轴重合,且在xz平面上。位于艇囊11尾部的矢量推进装置的y轴坐标螺旋桨与重心在y轴的位置重合。位于艇囊11左右两侧的矢量推进装置关于xz平面对称,其与yz平面的距离为位于尾部的矢量推进装置与yz平面距离的一半。该布局形式能尽可能减少矢量推进装置提供矢量推力时对飞艇产生不必要的力矩,降低控制难度。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。