1.本发明属于测绘科学与技术/卫星导航定位技术领域,具体涉及一种根据卫星导航混合星座的设计参数预估各地面位置处的定位精度衰减因子的方法。
背景技术:
2.卫星导航系统的应用已经渗透到生产和生活的方方面面,定位是其核心功能,因此定位精度是评估卫星导航系统性能的重要指标之一。卫星导航定位精度主要跟两方面因素有关,一方面是卫星信号的测距精度,另一方面是卫星星座的几何构型强度,后者一般用定位精度衰减因子(dilution of precision,dop)来表达。对于定位精度衰减因子(dop)的计算,一般是根据实际测站位置和所获取的实测卫星星历数据进行计算,这种方法只能对已建成的卫星星座进行dop值计算,无法在星座部署方案设计阶段进行dop值的估计。在星座设计阶段,也有通过仿真的方法,生成模拟的卫星星历,从而计算各测站位置处的dop值,但这种方法受模拟仿真质量的影响,且一般计算较为复杂。
技术实现要素:
3.解决的技术问题:本发明针对星座设计阶段或星座扩充方案论证阶段的定位分析问题,提出了一种混合星座卫星导航定位精度衰减因子估计方法,根据现有导航星座的设计参数和实际观测数据拟合得到不同类型卫星的出现概率分析模型,只需要将少量的混合星座设计参数(如轨道类型、轨道高度或轨道周期、轨道倾角和卫星数目等)导入相应的出现概率分析模型,就可以计算出各类导航卫星在天球上各网格中出现的理论概率值,进而估计出全球任一测站位置处的卫星定位精度衰减因子数值,为导航卫星设计提供有效参考。
4.技术方案:
5.一种混合星座卫星导航定位精度衰减因子估计方法,所述估计方法包括以下步骤:
6.步骤1、获取待设计导航星座的基本参数;对于meo卫星,获取meo卫星的轨道倾角im、轨道高度hm、轨道周期tm和meo卫星数目nm;对于igso卫星,获取igso卫星的轨道倾角ii、轨道高度hi、轨道星下点轨迹交叉点经度λ0和igso卫星数目ni;对于geo卫星,获取geo卫星的数目ng和每一颗geo卫星的经度;
7.步骤2、根据现有导航星座的实际观测数据,拟合得到各类卫星在天球网格的出现概率分析模型,将待设计导航星座的基本参数导入相应分类卫星的出现概率分析模型,计算得到待设计导航星座的理论出现概率值;具体包括:
8.对于meo卫星,将天球按地心经度和纬度分别做m和n等分,形成m
×
n个网格;根据实际数据处理经验,meo卫星在天球上任一个网格(i,j)内出现的出现概率分析模型为:
[0009][0010]
公式(1)中,i=1,2,
…
,m,j=1,2,
…
,n;为meo卫星出现概率修正函数,该函数与格网位置有关;为网格(i,j)中心点的地心纬度;cm表达式为:
[0011][0012]
对于igso卫星,根据卫星轨道高度hi、轨道倾角ii和星下轨迹交叉点经度λ0的设计值,确定其经过的天球网格,令igso卫星所经过的天球网格集为γ,根据实际数据处理经验,igso卫星在中心为的网格出现的出现概率分析模型为:
[0013][0014]
公式(3)中,为igso卫星出现概率修正函数,该函数与格网位置有关;max(ω
east
,ω
north
)为igso卫星东西向角速度ω
east
和南北向角速度ω
orth
中的较大者,卫星东西向角速度ω
east
和南北向角速度ω
north
表达式为:
[0015][0016]
公式(4)中,ti为igso轨道周期;ωe为地球自转角速度;公式(3)中ci的表达式为:
[0017][0018]
对于geo卫星,令geo卫星的坐标为(λg,0),λg是geo卫星的经度,geo卫星的纬度为0,根据实际数据处理经验,geo卫星在天球网格中出现的出现概率分析模型为:
[0019][0020]
公式(6)中,为geo卫星出现概率修正函数,该函数与格网位置有关,修正值用于弥补geo卫星漂移所引起的概率变化;表示geo卫星坐标在中心为的网格范围内;表示geo卫星坐标不在中心为的网格范围内;
[0021]
步骤3、构建虚拟观测方程;具体包括:
[0022]
令观测点o的大地坐标为(b,l,h),其对应的空间直角坐标为(xo,yo,zo);天球上中
心点坐标为的网格对应的空间直角坐标为(xs,ys,zs),网格中心相对于观测点的高度角ele为:
[0023][0024]
若高度角ele大于所设定的截止高度角ele0,将格网中心作为卫星的位置,对观测点建立虚拟观测方程为:
[0025][0026]
方程(8)中,v
ij
为残差项;(δx δy δz)为坐标改正数;δt为接收机钟误差;c为光速;l
ij
为其他项的组合;为卫星至观测点的方向余弦,其计算公式如下:
[0027][0028]
由于不能确定方程(8)中观测值的精度,无法根据观测值精度定权;将方程(8)所对应的权w
ij
设为meo卫星、igso卫星和geo卫星在为中心的天球网格中出现概率之和,即:
[0029][0030]
步骤4、构建法方程系数矩阵;具体包括:
[0031]
由方程(8)计算得到误差方程组的系数矩阵a为:
[0032][0033]
公式(11)中,a为t
×
4阶矩阵,t=m
×
n;误差方程组所对应的法方程的系数矩阵a
t
wa为:
[0034][0035]
公式(12)中,w为权矩阵,其形式为:
[0036][0037]
当天球网格中心相对于观测点的高度角小于所设定的截止高度角时,对应的观测方程的权w
ij
取0;
[0038]
步骤5、生成参数协因数矩阵,根据生成的参数协因数矩阵,计算得到定位精度衰减因子;参数协因数矩阵的生成过程具体如下:
[0039]
构建坐标和钟差参数的协因数矩阵q
xyzt
为:
[0040][0041]
公式(14)中q
xyzt
为空间直角坐标系下的协因数矩阵,q
xx
、q
yy
、q
zz
、q
tt
分别为坐标参数x、y、z和时间参数t的协因数,q
xy
和q
yx
为参数x和y的互协因数,q
yx
和q
zx
为参数x和z的互协因数,q
yz
和q
zy
为参数y和z的互协因数,q
xt
和q
tx
为参数x和t的互协因数,q
yt
和q
ty
为参数y和t的互协因数,q
zt
和q
tz
为参数z和t的互协因数,提取公式(14)中的三维坐标部分,得到:
[0042][0043]
计算得到站心地平坐标系下的协因数矩阵q
neu
为:
[0044][0045]
公式(16)中q
nn
、q
ee
、q
uu
分别为北坐标、东坐标和高程参数的协因数,q
ne
和q
en
为北坐标参数与东坐标参数互协因数,q
nu
和q
un
为北坐标参数与高程参数互协因数,q
eu
和q
ue
为东坐标参数与高程参数互协因数,s矩阵为:
[0046][0047]
其中,(b0,l0)为观测站点的经纬度坐标。
[0048]
进一步地,根据生成的参数协因数矩阵,计算得到定位精度衰减因子的过程具体包括:
[0049]
根据公式(17)和公式(14),得到平面定位精度衰减因子hdop为:
[0050][0051]
高程定位精度衰减因子vdop为:
[0052][0053]
空间位置定位精度衰减因子pdop为:
[0054][0055]
接收机钟差精度衰减因子tdop为:
[0056][0057]
几何精度衰减因子gdop为:
[0058][0059]
有益效果:
[0060]
第一,本发明提出的混合星座卫星导航定位精度衰减因子估计方法,根据现有导航星座的设计参数和实际观测数据拟合得到不同类型卫星的出现概率分析模型,只需要将少量的星座设计参数导入相应类型卫星的出现概率分析模型,就可以准确估计单一或混合星座下,地面任意测站位置处的日平均dop值,计算效率较高,可以用于导航星座的设计阶段或者现有星座布局改进的方案设计阶段,为星座设计提供参考。
[0061]
第二,本发明提出的混合星座卫星导航定位精度衰减因子估计方法,综合考虑导航星座设计值和实测值之间的误差以及观测点地域差异,创新性地提出了通过卫星速度反推出现概率的方法,成功地在设计阶段计算得到误差值极小的dop值,且误差值会随着出现概率模型的验证频次不断修正。
附图说明
[0062]
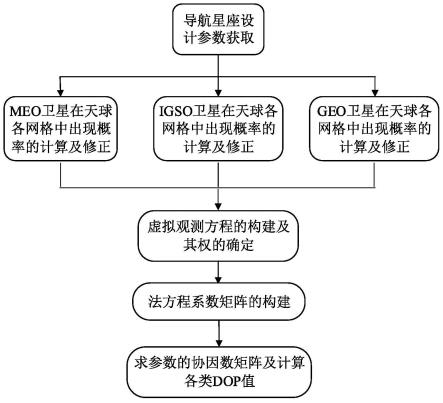
图1为本发明实施例的混合星座卫星导航定位精度衰减因子估计方法流程图。
[0063]
图2是平面定位精度衰减因子(hdop)与参考值(根据广播星历计算)的比较结果示意图,计算时采用东经116.5
°
上各纬度处的地面点,高度为0,截止高度角取5
°
。
[0064]
图3是高程定位精度衰减因子(vdop)与参考值(根据广播星历计算)的比较结果示意图,计算时采用东经116.5
°
上各纬度处的地面点,高度为0,截止高度角取5
°
。
[0065]
图4是接收机钟差精度衰减因子(tdop)与参考值(根据广播星历计算)的比较结果示意图,计算时采用东经116.5
°
上各纬度处的地面点,高度为0,截止高度角取5
°
。
具体实施方式
[0066]
下面的实施例可使本专业技术人员更全面地理解本发明,但不以任何方式限制本发明。
[0067]
图1为本发明实施例的混合星座卫星导航定位精度衰减因子估计方法流程图。该估计方法主要包括以下步骤:获取混合导航星座的设计参数;计算各类卫星在天球网格中出现的概率;构建虚拟观测方程及其对应的权;构建法方程系数矩阵;求参数些因数矩阵及计算各类dop值。
[0068]
本实施例提出的混合星座卫星导航定位精度衰减因子估计方法,可适用于多种轨道类型(如meo、igso和geo)卫星混合的导航系统。为验证本发明的有效性,以北斗三号星座(混合星座)设计参数为例,实施该方法,具体步骤为:
[0069]
步骤1、获取所设计星座的基本信息;具体如下:
[0070]
北斗三号星座具有meo、igso、geo三种轨道类型。其中,meo卫星对应的参数为:轨道倾角im=55
°
;轨道高度hm=21528km;轨道周期tm=46404s;卫星数目nm=24颗。igso卫星对应的参数为:轨道倾角ii=55
°
;轨道高度hi=35786km;轨道星下点轨迹交叉点经度λ0=118
°
e;卫星数目ni=3颗。geo卫星对应的参数为:卫星数目ng=3颗;各位行的经度分别为80
°
e、110.5
°
e和140
°
e。
[0071]
步骤2、计算各类卫星在天球网格中的出现概率;具体如下:
[0072]
将天球按地心经度和纬度分别做m=360和n=180等分,形成m
×
n个网格,则meo卫星在天球上任一个网格(i,j)内卫星出现的概率为:
[0073][0074]
公式(1)中,i=1,2,
…
,m,j=1,2,
…
,n;im为meo卫星的轨道倾角;为meo卫星出现概率修正函数,该函数与格网位置有关;为网格(i,j)中心点的地心纬度;tm为meo卫星轨道周期;cm表达式为:
[0075][0076]
公式(2)中nm为meo卫星的数目。
[0077]
对于igso卫星,根据卫星轨道高度hi、轨道倾角ii和星下轨迹交叉点经度λ0的设计值,确定其经过的天球网格,令igso卫星所经过的天球网格集为γ,根据实际数据处理经验,igso卫星在中心为的网格出现的出现概率分析模型为:
[0078][0079]
公式(3)中,为igso卫星出现概率修正函数,该函数与格网位置有关;max(ω
east
,ω
north
)为igso卫星东西向角速度和南北向角速度中的较大者,卫星东西和南北向
的角速度表达式为:
[0080][0081]ii
为igso卫星轨道倾角;ti为igso轨道周期;ωe为地球自转角速度。公式(3)中ci的表达式为:
[0082][0083]
其中ni为igso卫星的数目。
[0084]
geo卫星在地固系下是静止的,即它的地心经纬度为一恒定值,经度为设计的经度,纬度为0,即坐标为(λg,0),考虑到geo卫星漂移,根据实际数据处理经验,geo卫星在天球网格中出现的出现概率分析模型为:
[0085][0086]
公式(6)中,为geo卫星出现概率修正函数,该函数与格网位置有关,修正值用于弥补geo卫星漂移所引起的概率变化;表示geo卫星坐标在中心为的网格范围内;表示geo卫星坐标不在中心为的网格范围内。
[0087]
步骤3、虚拟观测方程构建;具体如下:
[0088]
若某一观测点o的大地坐标为(b,l,h),其对应的空间直角坐标为(xo,yo,zo)。天球上某一网格的中心点坐标为其对应的空间直角坐标为(xs,ys,zs),则网格中心相对于观测点的高度角为:
[0089][0090]
若高度角ele大于所设定的截止高度角ele0,则将格网中心作为卫星的位置,对观测点建立虚拟观测方程(误差方程)为:
[0091][0092]
方程(8)中v
ij
为残差项;(δx δy δz)为坐标改正数;δt为接收机钟误差;c为光速;l
ij
为其他项的组合;为卫星(格网中心位置)至观测点的方向余弦,其计算如下:
[0093][0094]
将方程(8)所对应的权w
ij
设为meo、igso和geo卫星在(λi,)为中心的天球网格中出现概率之和,即:
[0095][0096]
步骤4、法方程系数矩阵构建;具体如下:
[0097]
由(8)式可得误差方程组的系数矩阵为:
[0098][0099]
公式(11)中,i=1,2,
…
,m;j=1,2,
…
,n;t=m
×
n。误差方程组所对应的法方程的系数矩阵为:
[0100][0101]
公式(12)中,w为权矩阵,其形式为:
[0102][0103]
当某一天球网格中心相对于观测点的高度角小于所设定的截止高度角时,则对应的观测方程的权取0,即w
ij
=0。
[0104]
步骤5、参数协因数矩阵的生成及定位精度衰减因子计算;具体如下:
[0105]
坐标和钟差参数的协因数矩阵为法方程系数矩阵的逆矩阵,即:
[0106][0107]
公式(14)中q
xyzt
为空间直角坐标系下的协因数矩阵,将公式(14)中的三维坐标部分单独提取出来,得
[0108][0109]
则站心地平坐标系下的协因数矩阵为:
[0110][0111]
公式(16)中的h矩阵为:
[0112][0113]
其中(b0,l0)为观测站点的经纬度坐标。
[0114]
根据公式(17)和公式(14)可得平面定位精度衰减因子(hdop)为:
[0115][0116]
高程定位精度衰减因子(vdop)为:
[0117][0118]
空间位置定位精度衰减因子(pdop)为:
[0119][0120]
接收机钟差精度衰减因子(tdop)为:
[0121][0122]
几何精度衰减因子(gdop)为:
[0123][0124]
通过实施例计算了全球多个测站位置处的北斗三号定位精度衰减因子(日平均值),图2、图3和图4分别为平面定位精度衰减因子hdop、高程定位精度衰减因子vdop和接收机钟差精度衰减因子tdop的计算值与参考值,实线为本发明方法的计算值,虚线为参考值,参考值根据某一天的实际观测广播星历计算。各图中展示的是东经116.5
°
上的各纬度处的dop值,计算时测站大地高取0m,截止高度角取5
°
。各图均显示本发明方法计算值与参考值较为接近,并且随着纬度的变化,各类dop值的计算值与参考值的变化趋势完全一致,说明
了本发明方法的有效性。
[0125]
本实施例只需少量的星座参数设计值,即可快速准确地估计出任一测站位置处各类dop值的日平均值,可用于导航星座设计阶段的星座性能评估,也可用于对现有导航系统进行星座扩充时的定位改进分析等。
[0126]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。