技术特征:
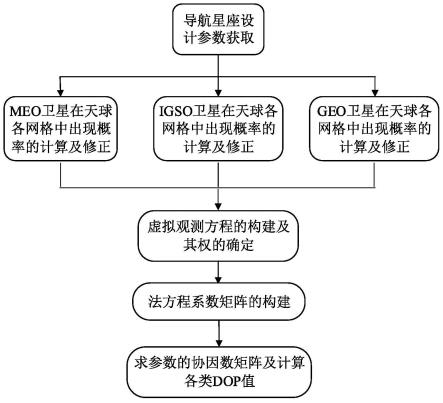
1.一种混合星座卫星导航定位精度衰减因子估计方法,其特征在于,所述估计方法包括以下步骤:步骤1、获取待设计导航星座的基本参数;对于meo卫星,获取meo卫星的轨道倾角i
m
、轨道高度h
m
、轨道周期t
m
和meo卫星数目n
m
;对于igso卫星,获取igso卫星的轨道倾角i
i
、轨道高度h
i
、轨道星下点轨迹交叉点经度λ0和igso卫星数目n
i
;对于geo卫星,获取geo卫星的数目n
g
和每一颗geo卫星的经度;步骤2、根据现有导航星座的实际观测数据,拟合得到各类卫星在天球网格的出现概率分析模型,将待设计导航星座的基本参数导入相应分类卫星的出现概率分析模型,计算得到待设计导航星座的理论出现概率值;具体包括:对于meo卫星,将天球按地心经度和纬度分别做m和n等分,形成m
×
n个网格;根据实际数据处理经验,meo卫星在天球上任一个网格(i,j)内出现的出现概率分析模型为:公式(1)中,i=1,2,...,m,j=1,2,...,n;为meo卫星出现概率修正函数,该函数与格网位置有关;为网格(i,j)中心点的地心纬度;c
m
表达式为:对于igso卫星,根据卫星轨道高度h
i
、轨道倾角i
i
和星下轨迹交叉点经度λ0的设计值,确定其经过的天球网格,令igso卫星所经过的天球网格集为γ,根据实际数据处理经验,igso卫星在中心为的网格出现的出现概率分析模型为:公式(3)中,为igso卫星出现概率修正函数,该函数与格网位置有关;max(ω
east
,ω
north
)为igso卫星东西向角速度ω
east
和南北向角速度ω
north
中的较大者,卫星东西向角速度ω
east
和南北向角速度ω
north
表达式为:公式(4)中,t
i
为igso轨道周期;ω
e
为地球自转角速度;公式(3)中c
i
的表达式为:
对于geo卫星,令geo卫星的坐标为(λ
g
,0),λ
g
是geo卫星的经度,geo卫星的纬度为0,根据实际数据处理经验,geo卫星在天球网格中出现的出现概率分析模型为:公式(6)中,为geo卫星出现概率修正函数,该函数与格网位置有关,修正值用于弥补geo卫星漂移所引起的概率变化;表示geo卫星坐标在中心为的网格范围内;表示geo卫星坐标不在中心为的网格范围内;步骤3、构建虚拟观测方程;具体包括:令观测点o的大地坐标为(b,l,h),其对应的空间直角坐标为(x
o
,y
o
,z
o
);天球上中心点坐标为的网格对应的空间直角坐标为(x
s
,y
s
,z
s
),网格中心相对于观测点的高度角ele为:若高度角ele大于所设定的截止高度角ele0,将格网中心作为卫星的位置,对观测点建立虚拟观测方程为:方程(8)中,v
ij
为残差项;(δx δy δz)为坐标改正数;δt为接收机钟误差;c为光速;l
ij
为其他项的组合;为卫星至观测点的方向余弦,其计算公式如下:由于不能确定方程(8)中观测值的精度,无法根据观测值精度定权;将方程(8)所对应的权w
ij
设为meo卫星、igso卫星和geo卫星在为中心的天球网格中出现概率之和,即:步骤4、构建法方程系数矩阵;具体包括:
由方程(8)计算得到误差方程组的系数矩阵a为:公式(11)中,a为t
×
4阶矩阵,t=m
×
n;误差方程组所对应的法方程的系数矩阵a
t
wa为:公式(12)中,w为权矩阵,其形式为:当天球网格中心相对于观测点的高度角小于所设定的截止高度角时,对应的观测方程的权w
ij
取0;步骤5、生成参数协因数矩阵,根据生成的参数协因数矩阵,计算得到定位精度衰减因子;参数协因数矩阵的生成过程具体如下:构建坐标和钟差参数的协因数矩阵q
xyzt
为:公式(14)中q
xyzt
为空间直角坐标系下的协因数矩阵,q
xx
、q
yy
、q
zz
、q
tt
分别为坐标参数x、y、z和时间参数t的协因数,q
xy
和q
yx
为参数x和y的互协因数,q
yx
和q
zx
为参数x和z的互协因数,q
yz
和q
zy
为参数y和z的互协因数,q
xt
和q
tx
为参数x和t的互协因数,q
ty
和q
ty
为参数y和t的互协因数,q
zt
和q
tz
为参数z和t的互协因数,提取公式(14)中的三维坐标部分,得到:
计算得到站心地平坐标系下的协因数矩阵q
neu
为:公式(16)中q
nn
、q
ee
、q
uu
分别为北坐标、东坐标和高程参数的协因数,q
ne
和q
en
为北坐标参数与东坐标参数互协因数,q
nu
和q
un
为北坐标参数与高程参数互协因数,q
eu
和q
ue
为东坐标参数与高程参数互协因数,s矩阵为:其中,(b0,l0)为观测站点的经纬度坐标。2.根据权利要求1所述的混合星座卫星导航定位精度衰减因子估计方法,其特征在于,根据生成的参数协因数矩阵,计算得到定位精度衰减因子的过程具体包括:根据公式(17)和公式(14),得到平面定位精度衰减因子hdop为:高程定位精度衰减因子vdop为:空间位置定位精度衰减因子pdop为:接收机钟差精度衰减因子tdop为:几何精度衰减因子gdop为:
技术总结
本发明公开了一种混合星座卫星导航定位精度衰减因子的估计方法,包括以下步骤:获取导航星座中轨道高度(或轨道周期)、轨道倾角、卫星数目等参数设计值;计算各类卫星在天球网格的出现概率值并根据现有星座实际观测数据进行修正;构建中地球轨道(MEO)卫星、倾斜同步地球轨道(IGSO)卫星和静止地球轨道(GEO)卫星虚拟观测方程,构建法方程系数矩阵;估计得到坐标和接收机钟差参数的协因数矩阵;计算平面位置精度衰减因子HDOP、高程精度衰减因子VDOP和接收机钟差精度衰减因子TDOP。本发明只需少量的星座参数设计值,即可快速准确地估计出任一测站位置处各类DOP值的日平均值,可用于导航星座设计阶段的星座性能评估,也可用于对现有导航系统进行星座扩充时的定位改进分析等。有导航系统进行星座扩充时的定位改进分析等。有导航系统进行星座扩充时的定位改进分析等。
技术研发人员:王明华 陈俊平 孟令东 吕卓宸 付居正 谢涛
受保护的技术使用者:中国科学院上海天文台
技术研发日:2022.08.17
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。