技术特征:
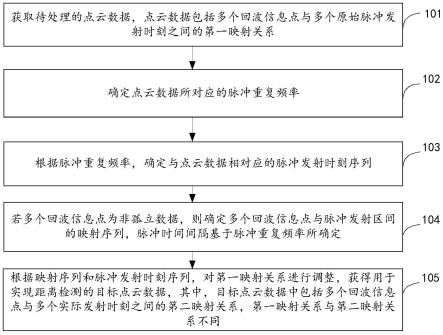
1.一种激光雷达距离模糊消除方法,其特征在于,包括:获取待处理的点云数据,所述点云数据包括多个回波信息点与多个原始脉冲发射时刻之间的第一映射关系;确定所述点云数据所对应的脉冲重复频率;根据所述脉冲重复频率,确定与所述点云数据相对应的脉冲发射时刻序列;若所述多个回波信息点为非孤立数据,则确定所述多个回波信息点与脉冲发射区间的映射序列,所述脉冲发射区间基于所述脉冲重复频率所确定;根据所述映射序列和所述脉冲发射时刻序列,对所述第一映射关系进行调整,获得用于实现距离检测的目标点云数据,其中,所述目标点云数据中包括多个回波信息点与多个实际发射时刻之间的第二映射关系,所述第一映射关系与所述第二映射关系不同。2.根据权利要求1所述的方法,其特征在于,所述根据所述脉冲重复频率,确定与所述点云数据相对应的脉冲发射时刻序列,包括:基于所述点云数据,确定原始脉冲发射时刻序列;根据所述脉冲重复频率,确定脉冲时间间隔;根据所述原始脉冲发射时刻序列和所述脉冲时间间隔,确定与所述点云数据相对应的脉冲发射时刻序列。3.根据权利要求1所述的方法,其特征在于,所述点云数据包括扫描角,确定所述多个回波信息点与脉冲发射区间的映射序列,包括:根据所述点云数据中的扫描角对所述点云数据进行分割处理,确定所述点云数据中各个回波信息点所对应的扫描线,所述扫描线中包括第一扫描线;确定所述第一扫描线中与所述扫描角相对应的目标数据点,所述扫描角为0
°
或者接近0
°
;根据所述点云数据所对应的脉冲重复频率,确定所述目标数据点与所述脉冲发射区间的初始映射序列;利用动态规划算法,以所述初始映射序列为起点进行回溯,确定所述第一扫描线中的多个回波信息点与所述脉冲发射区间的第一子映射序列;根据所述第一子映射序列和动态规划算法,确定所述第一扫描线以外的多个回波信息点与所述脉冲发射区间的第二子映射序列;基于所述第一子映射序列和所述第二子映射序列,确定所述多个回波信息点与脉冲发射区间的映射序列。4.根据权利要求3所述的方法,其特征在于,所述点云数据包括测量距离,所述利用动态规划算法,以所述初始映射序列为起点进行回溯,确定所述第一扫描线中的多个回波信息点与所述脉冲发射区间的第一子映射序列,包括:在所述脉冲发射时刻序列中确定所述第一扫描线中多个回波信息点各自对应的当前脉冲发射时刻;获取位于所述当前脉冲发射时刻之前的多个历史脉冲发射时刻;根据所述多个回波信息点各自对应的测量距离、当前脉冲发射时刻以及所述多个历史脉冲发射时刻,确定所述多个回波信息点所对应的二维距离信息;根据所述二维距离信息,确定所述多个回波信息点所对应的二维噪音能量信息;
根据所述二维噪音能量信息,确定所述多个回波信息点所对应二维指针信息;检测所述多个历史脉冲发射时刻中是否包括未被记录的脉冲发射时刻;若不包括未被记录的脉冲发射时刻,则根据所述二维指针信息和所述二维噪音能量信息,以所述初始映射序列为起点进行回溯,确定所述第一扫描线中的多个回波信息点与所述脉冲发射区间的第一子映射序列;或者,若包括未被记录的脉冲发射时刻,则将所述二维距离信息中所述回波信息点所对应的列信息、所述二维噪音能量信息中所述回波信息点所对应的列信息以及所述二维指针信息中的所述回波信息点所对应的列信息均设置为第二预设值。5.根据权利要求4所述的方法,其特征在于,所述根据所述多个回波信息点各自对应的测量距离、当前脉冲发射时刻以及所述多个历史脉冲发射时刻,确定所述多个回波信息点所对应的二维距离信息,包括:根据所述多个数据点中各自对应的测量距离、当前脉冲发射时刻以及所述多个历史脉冲发射时刻,在各个脉冲发射区间中分别确定所述多个回波信息点各自所对应的距离信息;根据所述多个回波信息点各自所对应的距离信息,确定所述多个回波信息点所对应的二维距离信息。6.根据权利要求4所述的方法,其特征在于,所述根据所述二维距离信息,确定所述多个回波信息点所对应的二维噪音能量信息,包括:获取所述多个回波信息点与目标数据点之间的数据关系;若所述多个回波信息点为所述目标数据点之前所获得的数据,则根据所述二维距离信息,以第一个回波信息点开始,按照预设的递增顺序确定所述多个回波信息点各自对应的二维噪音能量信息;若所述回波信息点为目标回波信息点之后所获得的数据,则根据所述二维距离信息,以最后一个回波信息点开始,按照预设的递减顺序确定所述多个回波信息点各自对应的二维噪音能量信息。7.根据权利要求6所述的方法,其特征在于,所述根据所述二维距离信息,以第一个回波信息点开始,按照预设的递增顺序确定所述多个回波信息点各自对应的二维噪音能量信息,包括:将所述二维噪音能量信息中与第一个回波信息点相对应的列信息设置为初始态;从所述第一个回波信息点开始按照递增的顺序,依次获取所述二维距离信息中所述回波信息点在各个位置上所对应的距离值、以及前一回波信息点所对应的前一距离值;获取所述前一回波信息点所对应的前一噪音能量值;根据所述各个回波信息点所对应的距离值、所述前一距离值以及所述前一噪音能量值,确定所述多个回波信息点在各个位置上的噪音能量值;根据所述多个回波信息点在各个位置上的噪音能量值,确定所述多个回波信息点所对应的二维噪音能量信息。8.根据权利要求6所述的方法,其特征在于,所述根据所述二维距离信息,以最后一个回波信息点开始,按照预设的递减顺序确定所述多个回波信息点各自对应的二维噪音能量信息,包括:
将所述二维噪音能量信息中与最后一个回波信息点相对应的列信息设置为初始态;从所述最后一个回波信息点开始按照递减的顺序,依次获取所述二维距离信息中所述回波信息点在各个位置上所对应的距离值、以及后一回波信息点所对应的后一距离值;获取所述后一回波信息点所对应的后一噪音能量值;根据所述各个回波信息点所对应的距离值、所述后一距离值以及所述后一噪音能量值,确定所述多个回波信息点在各个位置上的噪音能量值;根据所述多个回波信息点在各个位置上的噪音能量值,确定所述多个回波信息点所对应的二维噪音能量信息。9.根据权利要求4所述的方法,其特征在于,所述根据所述二维噪音能量信息,确定所述多个回波信息点所对应二维指针信息,包括:根据所述二维噪音能量信息中各个回波信息点所在位置的噪音能量值,确定各个回波信息点所对应的指针值;根据所述各个回波信息点所对应的指针值,确定所述各个回波信息点所对应的二维指针信息。10.根据权利要求4所述的方法,其特征在于,所述根据所述二维指针信息和所述二维噪音能量信息,以所述初始映射序列为起点进行回溯,确定所述第一扫描线中多个回波信息点与所述脉冲发射区间之间的第一子映射序列,包括:获取所述多个回波信息点与目标数据点之间的数据关系;若所述多个回波信息点为所述目标数据点之前所获得的数据,则根据所述二维指针信息和所述二维噪音能量信息,从所述初始映射序列开始按照递减的顺序进行回溯,确定所述多个回波信息点所对应的映射序列;若所述多个回波信息点为所述目标数据点之后所获得的数据,则根据所述二维指针信息和所述二维噪音能量信息,从所述初始映射序列开始按照递增的顺序进行回溯,确定所述多个数据点所对应的映射序列。11.根据权利要求3所述的方法,其特征在于,所述根据所述第一子映射序列和动态规划算法,确定所述第一扫描线以外的多个回波信息点与所述脉冲发射区间的第二子映射序列,包括:在所述脉冲发射时刻序列中确定所述第一扫描线以外的多个回波信息点各自对应的当前脉冲发射时刻;获取位于所述当前脉冲发射时刻之前的多个历史脉冲发射时刻;根据所述多个回波信息点各自对应的测量距离、当前脉冲发射时刻以及所述多个历史脉冲发射时刻,确定所述多个回波信息点所对应的二维距离信息;根据所述二维距离信息和第一子映射序列,确定所述多个回波信息点所对应的二维噪音能量信息;根据所述二维噪音能量信息,确定所述多个回波信息点所对应二维指针信息;检测所述多个历史脉冲发射时刻中是否包括未被记录的脉冲发射时刻;若不包括未被记录的脉冲发射时刻,则确定最后一个回波信息点与所述脉冲发射区间之间的目标映射序列,并根据所述二维指针信息和所述二维噪音能量信息,以所述目标映射序列为起点进行回溯,确定所述第一扫描线外的多个回波信息点与所述脉冲发射区间的
第二子映射序列;或者,若包括未被记录的脉冲发射时刻,则将所述二维距离信息中所述回波信息点所对应的列信息、所述二维噪音能量信息中所述回波信息点所对应的列信息以及所述二维指针信息中的所述回波信息点所对应的列信息均设置为第二预设值。12.根据权利要求1所述的方法,其特征在于,所述根据所述映射序列和所述脉冲发射时刻序列对所述第一映射关系进行调整,获得用于实现距离检测的目标点云数据,包括:根据所述映射序列和所述脉冲发射时刻序列,确定所述多个回波信息点各自对应的实际脉冲发射时刻;基于所述多个回波信息以及与各个回波信息相对应的实际发射时刻对所述第一映射关系进行更新,获得用于实现距离检测的目标点云数据。13.根据权利要求1所述的方法,其特征在于,所述方法还包括:若所述多个回波信息点为孤立数据,则确定所述多个回波信息点各自所对应的虚拟回波位置;确定所述多个回波信息点各自对应的地物目标点;根据所述地物目标点和虚拟回波位置,对所述第一映射关系进行调整,获得用于实现距离检测的目标点云数据。14.根据权利要求13所述的方法,其特征在于,所述确定所述多个回波信息点各自所对应的虚拟回波位置,包括:获取所述多个回波信息点各自对应的测量距离;获取所述多个回波信息点中各自对应的当前脉冲发射时刻;获取所述多个回波信息点在脉冲发射区间中所对应的区间内脉冲发射时刻;获取所述当前脉冲发射时刻与所述区间内脉冲发射时刻的时刻差;根据所述时刻差和激光传播速度,确定所述多个回波信息点各自对应的空间距离;获取所述回波信息点所对应的测量距离与所述空间距离之间的距离和值;将所述距离和值确定为在各个脉冲发射区间中的与所述多个回波信息点各自对应的虚拟回波位置。15.根据权利要求13所述的方法,其特征在于,所述回波信息点包括测量距离,所述确定所述多个回波信息点各自对应的地物目标点,包括:获取与所述多个数据点各自相邻的多个相邻回波信息点,所述多个相邻回波信息点为非孤立数据;在所述多个相邻回波信息点中,确定最大测量距离所对应的目标相邻回波信息点;分别将所述多个回波信息点各自对应的目标相邻回波信息点,确定为所述多个回波信息点各自对应的地物目标点。16.根据权利要求13所述的方法,其特征在于,所述根据所述地物目标点和虚拟回波位置对所述第一映射关系进行调整,获得用于实现距离检测的目标点云数据,包括:获取用于进行距离检测操作容忍度;获取所述地物目标点的测量距离和虚拟回波位置的差值;根据所述容忍度以及所述差值,对所述第一映射关系进行调整,获得用于实现距离检测的目标点云数据。
技术总结
本发明实施例提供一种激光雷达距离模糊消除方法,该方法包括:获取待处理的点云数据,确定点云数据所对应的脉冲重复频率;根据脉冲重复频率,确定与点云数据相对应的脉冲发射时刻序列;确定多个回波信息点与脉冲发射区间的映射序列。根据映射序列和脉冲发射时刻序列,对第一映射关系进行调整,获得用于实现距离检测的目标点云数据。通过映射序列,确定多个回波信息点所位于的脉冲发射区间,结合脉冲发射时刻序列,确定出多个回波信息点所对应的实际脉冲发射时刻,以建立回波脉冲和脉冲发射时刻之间的正确映射关系,从而修正距离模糊的点云数据的错误位置,以实现消除点云数据中存在的距离模糊问题。距离模糊问题。距离模糊问题。
技术研发人员:卢昊 郝大禹 周楷 李明珠 范光鹏 王晗
受保护的技术使用者:北京林业大学
技术研发日:2022.08.17
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。