技术特征:
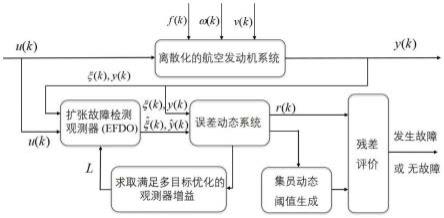
1.一种基于扩张故障检测观测器和集员估计的鲁棒故障检测方法,其特征在于,包括如下步骤建立航空发动机的离散的系统状态空间模型,所述模型包括集总扰动、测量噪声和执行器故障的参数;建立扩张故障检测观测器,所述扩张故障检测观测器中集总扰动增广后和状态向量形成新的增广向量;根据离散的系统状态空间模型和扩张故障检测观测器获得动态误差系统,所述动态误差系统包括第一动态误差子系统和第二动态误差子系统,所述第一动态误差子系统使残差对扰动和噪声具有鲁棒性,所述第二动态误差子系统使残差对故障具有敏感性,所述残差包括输出观测误差;根据所述第一动态误差子系统和第二动态误差子系统获取观测器增益矩阵;根据所述观测器增益矩阵建立基于集员估计的残差评价,根据所述残差评价确定所述系统故障发生或未发生。2.如权利要求1所述的一种基于扩张故障检测观测器和集员估计的鲁棒故障检测方法,其特征在于,所述离散的系统状态空间模型:其中:ξ(k 1)表示k 1时刻的增广向量;a表示已知具有合适维度的矩阵,e
d
表示已知具有合适维度的矩阵,表示维数为n
d
的单位矩阵,表示k时刻的增广向量,k表示仿真采样步长,表示转置,x表示系统的状态向量,d表示集总扰动;b表示已知具有合适维度的矩阵,u表示系统的控制输入向量;f表示具有合适维度的故障矩阵,f表示航空发动机执行器故障信号;f表示具有合适维度的故障矩阵,f表示航空发动机执行器故障信号;表示维数为n
d
的单位矩阵,h(k)=d(k 1)-d(k),h表示集总扰动的变化率,即下一时刻集总扰动和上一时刻的差;y表示系统的测量输出向量;c表示已知具有合适维度的矩阵;d
v
表示已知具有合适维度的矩阵,v表示测量噪声。3.如权利要求2所述的一种基于扩张故障检测观测器和集员估计的鲁棒故障检测方法,其特征在于,所述故障检测观测器:其中:
表示k 1时刻的增广向量的估计值,表示k时刻的增广向量的估计值,l表示故障检测观测器的增益,表示系统的测量输出的估计;是故障检测观测器的增益矩阵,l
x
表示状态观测器的增益矩阵,l
d
表示集总扰动观测器的增益矩阵。4.如权利要求3所述的一种基于扩张故障检测观测器和集员估计的鲁棒故障检测方法,其特征在于,所述动态误差系统:其中:e
x
(k)表示状态观测误差,x表示系统状态,表示状态的观测值;e
d
(k)表示总扰动观测误差,d表示集总扰动,表示集总扰动的观测值;a表示已知具有合适维度的矩阵,l表示状态观测器的增益矩阵,c表示已知具有合适维度的矩阵;d
v
表示已知具有合适维度的矩阵,v表示测量噪声;适维度的矩阵,v表示测量噪声;表示维数为n
d
的单位矩阵,h表示集总扰动的变化率,即下一时刻集总扰动和上一时刻的差;f表示具有合适维度的故障矩阵,f表示航空发动机执行器故障信号;r(k)表示输出观测误差。5.如权利要求4所述的一种基于扩张故障检测观测器和集员估计的鲁棒故障检测方法,其特征在于,将动态误差系统分为两个子系统;第一动态误差子系统:第二动态误差子系统:e(k)=e
l1
(k) e
l2
(k),r(k)=r
ι1
(k) r
ι2
(k),ι1表示第一动态误差子系统中残差的下角标,ι2表示第二动态误差子系统中残差的下角标;e
ι1
(k)表示第一动态误差子系统状态观测误差;e
ι2
(k)表示第二动态误差子系统状态观测误差;r
ι1
(k)表示第一动态误差子系统输出观测误差;r
ι2
(k)表示第二动态误差子系统输出观测误差。其中:(
ⅰ
)动态误差系统的第一动态误差子系统满足条件||g
ι1
(z)||
∞
<γ,g
ι1
(z)表示第一动态误差子系统输入的传递函数,|| ||
∞
表示无穷范数,γ表示满足线性矩阵不等式条件的
参数;(
ⅱ
)动态误差的第二动态误差子系统满足条件g
rι2
表示第二动态误差子系统输入的传递函数,β表示满足线性矩阵不等式条件的参数。6.如权利要求5所述的一种基于扩张故障检测观测器和集员估计的鲁棒故障检测方法,其特征在于,观测器增益矩阵l=g-1
w,参数g、w、p1、p2、α、γ、β满足以下的线性矩阵不等式条件,使用优化工具箱进行计算求得具体数值:式条件,使用优化工具箱进行计算求得具体数值:其中,∑
″
42
=-wd
v
∑
″
43
=gt=gt=gt=gt=gt=gt=gt其中:g、w、p1、p2是使用matlab优化工具箱进行增益矩阵计算过程中产生的参数矩阵;α、γ、β是使用matlab优化工具箱进行增益矩阵计算过程中的参数;i表示具有合适维度的单位矩阵;θ
l
表示给定的故障频域;he表示对于一个矩阵w,定义he(w)=w
·
w;δ表示一个给定的标量;k表示一个矩阵;η表示一个给定的标量;q表示一个正定矩阵。7.如权利要求6所述的一种基于扩张故障检测观测器和集员估计的鲁棒故障检测方法,其特征在于,在所述航空发动机系统无故障时,根据第一动态误差子系统得到r
ι1
(k)的一个集员估计ω
r
(k),r(k)=r
ι1
(k),r(k)∈ω
r
(k),
通过对第一动态误差子系统进行可达集分析,获取动态误差系统的可达集:其中:ω
e
(k)表示e(k)的可达集,h表示系统集总扰动变化率的集合,v表示系统噪声的集合,ω
r
(k)表示r(k)的可达集;根据动态误差系统的可达集,获取r(k)的可达集ω
r
(k)的区间包络:令得到残差r(k)的区间估计,r(k)表示所得残差的下界,表示所得残差的上界,在系统无故障时一旦所得到的残差r(k)超出区间,则系统发生故障。
技术总结
一种基于扩张故障检测观测器和集员估计的鲁棒故障检测方法,属于自动控制领域,为了解决航空发动机系统的故障检测生成残差鲁棒性低和阈值保守性大影响故障检测速度和准确度的问题,要点是根据离散的系统状态空间模型和扩张故障检测观测器获得动态误差系统,所述动态误差系统包括第一动态误差子系统和第二动态误差子系统,所述第一动态误差子系统使残差对扰动和噪声具有鲁棒性,所述第二动态误差子系统使残差对故障具有敏感性,所述残差包括输出观测误差,效果是分别使残差对扰动和噪声具有鲁棒性,使残差对故障具有敏感性,能够更准确输出鲁棒故障检测的残差信号,针对现有方法故障检测精度能够提高。法故障检测精度能够提高。法故障检测精度能够提高。
技术研发人员:孙希明 付水 汤文涛 汪锐
受保护的技术使用者:大连理工大学
技术研发日:2022.09.26
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。