1.本发明涉及城市轨道交通智慧防护,具体涉及一种基于图像指纹特征的城轨防汛防寒预警系统及方法。
背景技术:
2.城市轨道交通是城市公共交通的主干线,客流运送的大动脉,城市轨道交通的安全运行已成为社会关注的焦点和热点。目前,地铁等轨道交通设施的积水、积雪、结冰等灾害风险的识别和评估一定程度上依赖于工作人员巡检工作和主观判断,灾害的发现过程需要大量人员参与,从而导致风险规避能力差,风险发现不及时,处置效率低。如何通过科学有效的方法快速准确识别积水、积雪、结冰情况,从而及时地采取相应的防御措施以排除安全隐患,是现阶段城市轨道交通亟需解决的关键问题。
3.传统积水、积雪、结冰等灾情监测一般依靠水位传感器、温度传感器、雷达传感器等传感设施,需要提供专门供电和网络通讯设施,存在成本较高,施工与维护难度较大等问题。采用计算机视觉技术识别积水、积雪、结冰等场景,可直接在视频监控中心部署检测系统,不需在路面另外铺设电源与通讯线路,具有使用灵活、成本低等优点。近年出现了系列以纹理、颜色、边缘为特征对积水、积雪、结冰进行场景识别的检测算法,但这类技术易受噪声干扰,检测准确率较低,且无法提供定量的灾害情况分析。
技术实现要素:
4.发明目的:本发明旨在提出一种基于图像指纹特征的城轨防汛防寒预警系统及方法,快速、准确地给出积水、积雪、结冰等灾害识别和灾情量化分析,帮助迅速做出应急响应,提高灾情应对能力。
5.技术方案:第一方面,一种基于图像指纹特征的城轨防汛防寒预警系统,包括:
6.图像采集模块,用于获取监测区域的视频传输至监测坐标、面积数据库构建模块;
7.坐标、面积数据库构建模块,用于将视频图像分割成多个大小相同的切片单元,将每一个切片单元的像素坐标和像素面积与监测区域的实际空间坐标和实际空间面积相对应,存入坐标、面积数据库中;
8.灾害样本特征库构建模块,用于基于历史积水、积雪、结冰样本图像分割后得到的多个大小相同的切片单元,利用h、s、v三维空间分析构造哈希序列作为各切片单元的图像指纹特征,输入灾害识别模块;
9.实时图像特征提取模块,用于基于监控区域实时图像分割后得到的多个大小相同的切片单元,利用h、s、v三维空间分析构造哈希序列作为各切片单元的图像指纹特征,输入灾害识别模块;
10.灾害识别模块,用于计算实时图像各切片单元的指纹特征与样本图像切片单元指纹特征的汉明距离,基于汉明距离确定各切片单元属性,传输至灾害定位模块和灾害面积、深度检测模块;
11.灾害定位模块,用于从区域坐标数据库中检索积水、积雪、结冰切片单元对应的空间坐标,并计算重心坐标,确定灾情在监测区域中的位置;
12.灾害面积、深度检测模块,用于统计被确定为积水、积雪、结冰切片单元的数量,结合切片单元对应的实际空间面积,判断积水、积雪、结冰区域面积;以及针对积水情景,通过标定位检测与测量,识别积水深度;
13.智能预警模块,用于根据灾情检测结果,触发预警预案库中的应急预案,推送警报信息给相关工作人员进行处理。
14.第二方面,一种基于图像指纹特征的城轨防汛防寒预警方法,包括以下步骤:
15.对监控区域的历史积水、积雪、结冰样本图像进行分割,得到多个大小相同的切片单元,利用h、s、v三维空间分析构造哈希序列作为各切片单元的图像指纹特征;
16.对监控区域实时图像进行分割,得到的多个大小相同的切片单元,利用h、s、v三维空间分析构造哈希序列作为各切片单元的图像指纹特征;
17.分别计算实时图像各切片单元的指纹特征与样本图像切片单元指纹特征的汉明距离,基于汉明距离确定各切片单元属性;
18.从区域坐标数据库中检索积水、积雪、结冰切片单元对应的空间坐标,并计算重心坐标,进而确定灾情在监测区域中的位置,其中所述区域坐标数据库包括实时图像每一个切片单元的像素坐标与监测区域的实际空间坐标的对应关系以及切片单元的像素面积与监测区域的实际空间面积的对应关系;
19.统计被确定为积水、积雪、结冰切片单元的数量,结合切片单元对应的实际空间面积,判断积水、积雪、结冰区域面积;针对积水情景,通过标定位检测与测量,识别积水深度;
20.根据灾情检测结果,触发预警预案库中的应急预案,推送警报信息给相关工作人员进行处理。
21.进一步地,利用h、s、v三维空间分析构造哈希序列作为各切片单元的图像指纹特征包括:
22.以图像行方向为x轴正方向,图像列方向为y轴正方向,像素处的c分量值为z轴坐标建立三维空间坐标系,其中c∈{h,s,v},定义二维图像像素位置(i,j)处像素的c分量为lc(i,j),映射到三维空间中的坐标为(i,j,lc(i,j)),像素位置(i,j)上、下、左、右四个像素位置(i 1,j)、(i-1,j)、(i,j 1)、(i,j-1)处的c分量lc(i 1,j)、lc(i-1,j)、lc(i,j 1)、lc(i,j-1)映射到三维空间坐标系中的坐标分别为(i 1,j,lc(i 1,j))、(i-1,j,lc(i-1,j))、(i,j,lc(i,d 1))、(i,j,lc(i,j-1)),求出坐标(i 1,j,lc(i 1,j))、(i-1,j,lc(i-1,j))、(i,j,lc(i,j 1))、(i,j,lc(i,j-1))四个点在三维空间中围成的四边形的重心坐标o
i,j
,求出点(i,j,lc(i,j))与o
i,j
的距离d(i,j),构建距离特征矩阵d:
[0023][0024]
其中,n表示大小为n像素*n像素切片单元的行宽和列宽;
[0025]
基于距离特征矩阵d,若对应位置的距离值大于预设阈值t则置1,否则置0;
[0026]
将h分量、s分量、v分量的空间距离矩阵所有元素按顺序组合在一起构造成基于hsv空间分析的哈希序列g,作为各切片单元的图像指纹特征。
[0027]
进一步地,计算实时图像切片单元的指纹特征与样本图像切片单元指纹特征的汉明距离,基于汉明距离确定各切片单元属性包括:
[0028]
通过异或操作逐位比较切片单元的指纹特征,并按照下式进行求和:
[0029][0030]
式中,xc[i]为样本特征库中第i个切片单元的c分量的指纹特征,yc[i]为实时图像第i个切片单元的c分量的指纹特征,c∈{h,s,v},分别表示h通道、s通道和v通道;
[0031]
根据h、s、v不同分量的权重,计算图像指纹特征的加权相似度值:
[0032][0033]
式中,wc表示c分量对应的权重,dc表示c分量对应的汉明距离;
[0034]
若第i个切片单元的指纹特征的加权相似度值小于预设阈值t,则将该加权相似度值放入集合a,计算集合a中加权相似度值的平均值:
[0035][0036]
式中,pi(x,y)表示集合a中第i个切片单元的指纹特征的加权相似度值,z为集合a中元素总数,l表示积水、积雪、结冰三种类型之一,d
l
(x,y)作为最终确定的实时图像切片单元的指纹特征与样本图像切片单元指纹特征的汉明距离;
[0037]
取最终确定的汉明距离最小的值对应的样本库类别作为实时图像切片单元的属性。
[0038]
进一步地,确定灾情在监测区域中的位置包括:
[0039]
将被识别为积水、积雪、结冰区域的切片单元放入集合b中,统计切片单元集合b的中各切片单元的像素坐标,从坐标数据库中查找对应的实际空间坐标,分析积水、积雪、结冰区域最小外接矩形的四个顶点的实际空间坐标,以最小外接矩形的中心作为积水、积雪、结冰区域的实际位置坐标。
[0040]
进一步地,通过标定位检测与测量,识别积水深度包括:
[0041]
在积水检测监控区域标注多个深度标志位,当判定检测区图像为积水时,依次分割各深度标志位对应的标识图像,转换成64级灰度图后,计算灰度图的离散余弦变换矩阵,计算64个像素值的离散余弦变换矩阵的平均值,最终离散余弦变换矩阵中数值大于等于均值处设为1,小于均值处设为0,得到64位哈希序列的图像指纹;
[0042]
基于标志位区域图像的哈希特征,结合积水深度预置位初始图像的各深度预置位图像的哈希特征,计算二者的特征相似度,当二者的特征相似度小于指定阈值d时,判断判断积水深度未达到该标志位;反之,判断积水深度达到该标志位。
[0043]
进一步地,所述方法还包括:
[0044]
对检测出的灾情面积qk采用最小二乘法拟合得出曲线函数并求偏导,得出灾情面积变化度量值基于γ进行灾情趋势分析,γ大于零,说明灾情面积变大;γ小于零,说明灾情面积变小;|γ|越大,说明灾情面积变化速度越快。
[0045]
第三方面,一种计算机设备,包括:存储器,存储有一个或多个程序;以及处理器,
通信地耦接至所述存储器,并且被配置为由所述处理器执行,所述程序被处理器执行时实现如本发明第二方面所述的基于图像指纹特征的城轨防汛防寒预警方法。
[0046]
第四方面,一种非暂时性处理器可读存储介质,其上存储有处理器可执行指令,所述处理器可执行指令被移动终端的处理器执行时实现如本发明第二方面所述的基于图像指纹特征的城轨防汛防寒预警方法。
[0047]
有益效果:
[0048]
1、本发明通过采集大量历史积水、积雪、结冰图像,采用基于hsv空间分析的哈希序列构造算法,提取图像指纹特征,构建样本图像特征库,更全面、精准地表征图像,且具有较强的鲁棒性;通过建立积水、积雪、结冰灾害检测模型,提取监控区域实时图像指纹特征,计算与样本图像特征库中的指纹特征的汉明距离,实现积水、积雪、结冰等灾情的实时、精准有效识别;通过划分图像切片单元,建立各个切片单元像素坐标、面积与监控区域实际坐标、面积的对应关系,实现积水、积雪、结冰区域位置、面积的量化分析。此外,通过设置深度检测标志位,基于汉明距离度量积水、积雪状态下标志位与正常状态下标志位的相似度,进而判断积水、积雪深度。本发明结合积水、积雪、结冰的时空演变特征,综合分析灾害检测置信度,提供定量的灾害严重等级判定,有效助力地铁运营人员及时掌控灾害状况,确保强降雨强降雪期间地铁运营安全秩序稳定。
[0049]
2、本发明充分利用城轨现有的视频设备进行监测,硬件成本可忽略不计,采用计算机视觉及图像处理技术对各点位进行全天候不间断监测,无需人工干预,一旦监测到积水、积雪等灾害情况,系统自动生成预警数据,告知监控管理中心,提醒相关人员及时处理。本发明有效提高了地铁运营人员对积水、积雪、结冰等灾害识别的及时性和准确性,有助于决策人员迅速做出应急响应,进而更好地实现灾前预警预控、综合协调管理、统一应急指挥、高效智慧联动。
附图说明
[0050]
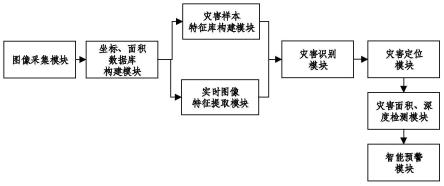
图1为本发明的系统框图;
[0051]
图2为基于图像指纹特征的城轨防汛防寒预警方法流程图;
[0052]
图3为基于hsv空间分析的图像指纹特征提取流程图;
[0053]
图4为基于图像确定灾情属性流程图。
具体实施方式
[0054]
下面结合附图对本发明的技术方案作进一步说明。
[0055]
本发明提出一种基于图像指纹特征的城轨防汛预警系统,包括图像采集模块,坐标、面积数据库构建模块,灾害样本特征库构建模块,实时图像特征提取模块,灾害识别模块,灾害定位模块,灾害面积、深度检测模块,智能预警模块,各个模块的连接关系如图1所示,其中:
[0056]
图像采集模块:获取监测区域的视频传输至监测区域坐标数据库构建模块,并将获取的往年同期积水、积雪、结冰状态的监控视频传输至灾害样本特征库构建模块,将获取的实时监控视频影像传输至实时图像特征提取模块。
[0057]
坐标、面积数据库构建模块:将摄像头获取的图像分割成多个大小相同的切片单
元,将每一个切片单元的像素坐标和像素面积与监测区域的实际空间坐标和实际空间面积相对应,存入坐标、面积数据库中。
[0058]
灾害样本特征库构建模块:采集历史的积水、积雪、结冰样本图像,分割后得到多个大小相同的切片单元,基于h、s、v三维空间分析构造哈希序列作为各切片单元的图像指纹特征,输入灾害识别模块。
[0059]
实时图像特征提取模块:将获取的监控区域实时图像,分割成多个大小相同的切片单元,基于h、s、v三维空间分析构造哈希序列作为各切片单元的图像指纹特征,输入灾害识别模块。
[0060]
灾害识别模块:分别计算实时图像各切片单元的指纹特征,与城轨积水、积雪、结冰样本图像切片单元指纹特征的汉明距离,分析汉明距离判断各切片单元属性,传输至灾害定位模块和灾害面积、深度检测模块。
[0061]
灾害定位模块:从监测区域坐标数据库中检索积水、积雪、结冰切片单元对应的空间坐标,并计算重心坐标,进而确定灾情在监测区域中的位置。
[0062]
灾害面积、深度检测模块:统计检测为积水、积雪、结冰切片单元的数量,结合切片单元对应的实际空间面积,判断积水、积雪、结冰区域面积。针对积水情景,通过标定位检测与测量,识别积水深度。
[0063]
智能预警模块:根据灾情检测结果,触发预警预案库中的应急预案,通过警报器、系统警报、app警报、微信小程序警报、短信警报等方式推送给相关工作人员进行处理。
[0064]
基于上述城轨防汛防寒预警系统,具体处理和分析过程包括如下步骤,如图2所示:
[0065]
步骤1:视频流抽帧解码及格式转化。
[0066]
通过标准视频流协议rtsp进行视频流的传输采集,并解码生成连续帧的图像。
[0067]
在一个实施例中,步骤1中进行视频流抽帧解码及格式转化的操作可以由图像采集模块完成。
[0068]
步骤2:建立区域坐标数据库。
[0069]
通过监控区域多个摄像头获取图像,对图像的像素按照n像素*n像素进行切分,得到多个切片单元,采用人工标注的方式,获取每一个切片单元的中心像素坐标、像素面积所对应的监控区域实际坐标和面积,保存至区域坐标数据库。
[0070]
在一个实施例中,步骤2中建立区域坐标数据库的操作可以由坐标、面积数据库构建模块完成。
[0071]
步骤3:构建积水、积雪、结冰灾害样本图像指纹特征库。
[0072]
参照图3,步骤3具体包括:
[0073]
步骤3.1:从监控区域历史视频中采集积水、积雪、结冰灾害图像,每帧按照n像素*n像素分割成多个切片单元。
[0074]
步骤3.2:对各个切片单元进行图像增强、小波滤波处理,降低光照和噪声对图像的影响。
[0075]
步骤3.3:计算每一帧图像的归一化色调、饱和度和亮度值,即归一化hsv信息:
[0076]
[0077][0078][0079]
其中,r、g、b分别代表图像像素点的红、绿、蓝三个颜色分量,h、s、v代表hsv颜色空间的色调、饱和度和亮度分量值。
[0080]
以图像行方向为x轴正方向,图像列方向为y轴正方向,像素处的h分量值为z轴坐标建立三维空间坐标系。定义二维图像像素位置(i,j)处像素的h分量为lh(i,j),映射到三维空间中的坐标为(i,j,lh(i,j))。像素位置(i,j)上、下、左、右四个像素位置(i 1,j)、(i-1,j)、(i,j 1)、(i,j-1)处的h分量lh(i 1,j)、lh(i-1,j)、lh(i,j 1)、lh(i,j-1)映射到三维空间坐标系中的坐标分别为(i 1,j,lh(i 1,j))、(i-1,j,lh(i-1,j))、(i,j,lh(i,j 1))、(i,j,lh(i,j-1)),求出坐标(i 1,j,lh(i 1,j))、(i-1,j,lh(i-1,j))、(i,j,lh(i,j 1))、(i,j,lh(i,j-1))四个点在三维空间中围成的四边形的重心坐标o
i,j
为(x
i,j
,y
i,j
,z
i,j
),求出点(i,j,lh(i,j))与o
i,j
的距离d(i,j),构建空间距离特征。
[0081]
可得距离特征矩阵d:
[0082][0083]
其中,n为大小为n像素*n像素切片单元的行宽和列宽。以此类推,求出s分量,v分量的空间距离矩阵。
[0084]
设置阈值t,若对应位置的距离值大于阈值t则置1,否则置0。将h分量、s分量、v分量的空间距离矩阵所有元素按顺序组合在一起构造成基于hsv空间分析的哈希序列g。所得到的哈希序列可称为样本图像切片单元指纹特征、或样本切片单元指纹特征、或样本切片单元指纹、或样本切片单元特征。所有样本切片单元指纹特征构成样本图像指纹特征库。
[0085]
在一个实施例中,步骤3中构建积水、积雪、结冰灾害样本图像指纹特征库的操作可以由灾害样本特征库构建模块来完成。
[0086]
步骤4:实时图像指纹特征提取。
[0087]
步骤4具体包括以下步骤:
[0088]
步骤4.1:对于采集的实时图像,按照n像素*n像素分割成多个切片单元;
[0089]
步骤4.2:按照步骤3.3的特征提取算法,计算每个切片单元的指纹特征,称为实时切片单元图像指纹特征、或实时切片单元指纹特征、或实时切片单元指纹、或实时切片单元特征。
[0090]
在一个实施例中,步骤4中实时图像指纹特征提取的操作可以由实时图像特征提取模块来完成。
[0091]
步骤5:基于提取的特征进行灾害识别。
[0092]
参照图4,分析各切片单元h通道、s通道、v通道指纹特征与积水、积雪、结冰样本特征库中图像指纹的汉明距离,汉明距离越大则说明图像的不一致程度越高,反之,汉明距离越小则说明图像越相似。
[0093]
以h通道为例,通过异或操作逐位比较切片单元的指纹特征,并按照下式进行求和:
[0094][0095]
式中,xh[i]为各样本特征库中第i个切片单元的h分量的指纹特征,yh[i]为实时图像第i个切片单元的h分量的指纹特征。
[0096]
以此类推,分别计算出s分量、v分量的指纹特征。
[0097]
根据h、s、v不同分量的权重,计算哈希序列最终的加权相似度值:
[0098][0099]
式中,c∈{h,s,v},分别表示h通道、s通道和v通道,wc表示c分量对应的权重,dc表示c分量对应的汉明距离。该加权相似度值也称为加权汉明距离。
[0100]
设置阈值t,若第i个切片单元的加权汉明距离小于阈值t,将该加权汉明距离放入集合a,计算集合a中加权汉明距离的平均值。以计算积水图像指纹的加权汉明距离平均值为例:
[0101][0102]
式中,z为集合a中的图像指纹特征个数,pi(x,y)为集合a中第i个切片单元图像指纹特征的加权汉明距离。
[0103]
以此类推,分别计算积雪图像指纹和结冰图像指纹的加权汉明距离平均值ds(x,y),db(x,y)。选取最小的加权汉明距离平均值所对应的样本库类别作为该切片单元的属性,若加权汉明距离大于预设阈值,判断该切片单元的属性不为积水、积雪、结冰之一。
[0104]
在一个实施例中,步骤5中进行灾害识别的操作可以由灾害识别模块来完成。
[0105]
步骤6、灾害检测置信度计算。
[0106]
通过多帧置信分析的策略,提高灾害检测的准确率。在提取图像进行分类的同时,启动计数器c、cw、cs、cr,c、cw、cs、cr分别表示检测帧数、积水、积雪和结冰检测结果累计帧数,每识别一帧,则c累加1,如分类结果为积水,则cw累加1,如分类结果为积雪,则cs累加1;如分类结果为结冰,则cr累加1;当c累计到一定数量如200帧时,分别统计积水、积雪和结冰的置信度αw、αs、ar,按以下公式计算:
[0107][0108][0109]
[0110]
设置置信度阈值l,当αr>l,]且αr=max(aw,αs,αr)时,判定类别为积水;当αw>l,且αw=max(αw,as,αr)时,判定类别为积雪;当αs>l,且αs=max(aw,as,αr)时,判定类别为结冰。
[0111]
在一个实施例中,步骤6中灾害检测置信度计算的操作可以由灾害识别模块来完成。
[0112]
步骤7、进行灾害位置、面积、深度检测。
[0113]
(1)灾害位置检测。
[0114]
根据识别为积水、积雪、结冰的切片单元在图像中的像素坐标,从坐标数据库中查找对应的实际空间坐标,从而确定积水、积雪、结冰区域的实际位置。例如识别为积水的区域由切片单元集合b构成,统计切片单元集合b的中各切片单元的像素坐标,从坐标数据库中查找对应的实际空间坐标,分析积水区域最小外接矩形的四个顶点的实际空间坐标,以最小外接矩形的中心作为积水区域的实际位置坐标。
[0115]
在一个实施例中,步骤7中的灾害位置检测的操作可以由灾害定位模块来完成。
[0116]
(2)灾害面积检测。
[0117]
根据识别为积水、积雪、结冰的切片单元像素面积与实际空间面积的对应关系,计算积水、积雪、结冰区域的实际面积。
[0118]
以计算第k帧图像中的积水灾害面积为例:
[0119][0120]
式中,qn为检测为积水的第n个切片单元的实际面积,n为检测为积水的切片单元总数。
[0121]
(3)积水深度检测。
[0122]
在积水检测监控区域采用彩条等标识标注出5cm、10cm、15cm等深度标志位,当判定检测区图像为积水时,依次分割各深度标志位对应的标识图像,转换成64级灰度图后,计算灰度图的离散余弦变换(dct)矩阵。
[0123]
计算64个像素值的dct矩阵的平均值,最终dct矩阵中数值大于等于均值处设为1,小于均值处设为0,得到64位哈希序列的图像指纹。
[0124]
提取标志位区域图像的哈希特征,结合积水深度预置位初始图像的各深度预置位图像的哈希特征,采用基于汉明距离的图像特征相似度判定法,检测该深度标志位是否积水。
[0125]
以5cm标志位的检测为例,汉明距离计算公式如下:
[0126][0127]
式中,p[i]为实时图像中5cm标志位区域的图像指纹特征,q[i]为无积水正常状态下5cm标志位的图像指纹特征。
[0128]
当检测到积水时,设置阈值d,当相似度s(x,y)小于阈值d时,判断积水深度未达到该标志位;反之,判断积水深度达到该标志位。
[0129]
在一个实施例中,步骤7中的灾害面积检测和积水深度检测的操作可以由灾害面积、深度检测模块来完成。
[0130]
(4)灾情位置、面积、深度演化趋势分析。
[0131]
在一个实施例中,步骤7中的灾情位置演化趋势分析可以由灾害定位模块来完成,面积、深度演化趋势分析可以由灾害面积、深度检测模块来完成。
[0132]
以积水面积演化趋势分析为例,对检测出的积水面积qk采用最小二乘法拟合得出曲线函数并求偏导,得出积水面积变化度量值用于灾情趋势分析。如γ大于零,说明积水面积变大;如γ小于零,说明积水面积变小;|γ|越大,说明积水面积变化速度越快。
[0133]
步骤9:智能预警。
[0134]
根据灾害面积占监测区域面积的比例、深度数据,以及灾害演化趋势,综合分析得到灾害风险值,以及相应的预警等级。
[0135]
在一个实施例中,步骤9中智能预警的操作可以由智能预警模块来完成。
[0136]
以积水风险值计算为例:
[0137]
灾害面积占监测区域面积的比例ps为:
[0138][0139]
其中,s为积水面积,s为监测区域面积。
[0140]
积水深度占监测区域高度的比例ph为:
[0141][0142]
其中,h为积水深度,h为监测区域高度。
[0143]
积水灾害的风险值r为:
[0144]
当γ>0时,
[0145][0146]
当γ≤0时,
[0147][0148]
其中,w
p
为积水面积指标权重,wh为积水深度指标权重,c为定值
[0149]
在一个示例中,风险值与预警等级的对应关系如表1所示。
[0150]
表1风险值与预警等级对照表
[0151][0152]
根据不同的灾害严重程度级别,判断预警等级,并启动相应的应急措施,智能预警包括声光警报器、系统警报、app警报、微信小程序警报、短信警报等,推送给相关工作人员进行处理。
[0153]
本发明还提供一种计算机设备,包括:一个或多个处理器;存储器;以及一个或多个程序,其中所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述程序被处理器执行时实现如上所述的基于图像指纹特征的城轨防汛防寒预警方法的步骤。
[0154]
本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的基于图像指纹特征的城轨防汛防寒预警方法的步骤。
[0155]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0156]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图来描述的。应理解可由计算机程序指令实现流程图中的每一流程、以及流程图中的流程的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程中指定的功能的装置。
[0157]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程中指定的功能。
[0158]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程中指定的功能的步骤。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
