1.本发明属于无人机辅助的无线通信领域,具体涉及到无人机空间位置的优化和系统资源分配的优化。
背景技术:
2.无人机与地面之间的非正交多址接入通信是一种空对地通信技术。非正交多址接入技术在提高频谱效率、支持海量连接、降低传输延迟等方面具有广阔的应用前景。非正交多址接入技术是在发射机的相同时间域、频率域或码域中叠加不同功率级别的多个用户信号,并利用连续干扰抵消技术在接收机区分不同用户的信号。无人机以其低成本、高机动性等优点在边境监视、应急搜索、环境监测、直播、航拍等领域受到广泛关注。无人机可以作为空中基站或者中继进行辅助通信,同时,无人机适用于在难以进入的地区进行辅助通信或者信号监测。
3.粒子群优化方法是由kennedy博士和eberhart博士提出的一种优化方法,本质是通过模拟鸟群觅食行为而发展起来的一种基于群体协作的随机搜索方法,通过不断更新粒子的速度和位置,比较更新前后粒子的局部最优值和全局最优值,最终得到全局最优值对应的最优位置。粒子群优化方法作为一种简单有效的快速优化方法在各个领域的集体智慧中得到了广泛的应用。
技术实现要素:
4.本发明所要解决的技术问题在于克服上述现有技术问题的缺点,提供一种速率高、适用于带宽分配因子和用户传输功率的无人机空间位置和系统资源分配的联合优化方法。
5.解决上述技术问题采用的技术方案是由下述步骤组成:
6.(1)构建信号传输模型
7.按下式确定空对地链路的信道增益h
mn
:
[0008][0009]
p
nlos,mn
=1-p
los,mn
[0010][0011]
其中,mn表示用户k到无人机u的链路或无人机u到基站b的链路,ρ0为单位信道增益,ρ0取值为-70~100db,d
mn
为节点m与节点n之间的距离、且不为零,ω
los
为视距的额外路径损耗,ω
nlos
为非视距的额外路径损耗,p
los,mn
为视距发生的概率,p
nlos,mn
为非视距发生的概率,c0和d0均为常数,θ
mn
为节点m与节点n之间的连线与地面的夹角;在第一阶段,所有的地面用户k共享频谱资源,k为有限正整数,按下式确定用户k到无人机u的可行速率r
ku
。
[0012][0013]
其中,b
t
为系统可用带宽,b
t
取值为1~1.5mhz,β1是第一阶段的带宽分配因子,β1∈(0,1),pk是用户k的传输功率,pj,j∈((k 1),k)是用户j的传输功率,h
ku
为用户k到无人机u的信道增益,h
ju
为用户j到无人机u的信道增益,n0为单位信道噪声功率,取值为-169dbm/hz;按下式确定无人机u到基站b的可行速率r
ub
:
[0014][0015]
其中β2为第二阶段的带宽分配因子,β2∈(0,1),(β1 β2)∈(0,1],h
ub
为无人机u到基站b的信道增益,pu是无人机u的传输功率,pu取值范围为0.7~1.2w。
[0016]
(2)优化无人机到基站的可行速率
[0017]
按下式优化无人机u到基站b的可行速率r
ub
:
[0018][0019]
优化条件如下:
[0020][0021]
0<β1<1
[0022]
0<β2<1
[0023]
0<β1 β2≤1
[0024][0025]
min{xk}≤xu≤max{xk}
[0026]
min{yk}≤yu≤max{yk}
[0027]hmin
≤hu≤h
max
[0028]
其中,表示对任意用户k,p
max
为用户的最大传输功率,(xu,yu,hu)是无人机u的空间位置,(xk,yk)是用户k的水平位置,h
min
是无人机u的最低高度,h
max
是无人机u的最高高度;将优化无人机u到基站b的可行速率分为优化无人机u空间位置和优化系统资源,通过粒子群优化方法求解无人机的最优空间位置,将无人机的位置信息代入系统资源分配优化中最大化无人机到基站的速率,直到收敛。
[0029]
(3)优化无人机空间位置
[0030]
采用粒子群优化方法,按下式更新粒子速度v(t 1):
[0031]
v(t 1)=ωv(t) c1r1(t)[p(t)-x(t)] c2r2(t)[g-x(t)]
[0032]
其中,x(t)是第t次迭代的粒子群位置,v(t)为第t次迭代的粒子群速度,ω为惯性权重系数,c1和c2是学习因子,r1(t)和r2(t)均为第t次迭代的(0,1)之间的随机数,p(t)是第t次迭代的局部最优粒子群位置,g为全局最优粒子位置。
[0033]
按下式更新粒子位置x(t 1):
[0034]
x(t 1)=x(t) v(t 1)
[0035]
按下式更新粒子局部最优适应度值p
best
(n):
[0036]
p
best
(n)=max(p
best
(n),fit(n))
[0037][0038]
其中,n∈n,n为粒子总数且为有限正整数,fit(n)为第n个粒子的适应度值;按下式更新粒子全局最优适应度值g
best
:
[0039]gbest
=max(g
best
,fit(n))
[0040]
其中,n∈n,迭代次数t达到迭代总数t或全局最优适应度值g
best
收敛时停止迭代,t为有限正整数,得到无人机最优空间位置。
[0041]
(4)优化系统资源
[0042]
按下式优化系统资源β1,β2和pk:
[0043][0044]
优化条件如下:
[0045][0046]
0<β1<1
[0047]
0<β2<1
[0048]
0<β1 β2≤1
[0049]
0<r≤kα
[0050][0051][0052][0053][0054][0055]
其中,l为迭代次数,且为有限正整数,α=min(r
ku
),r为目标函数的辅助变量,r≤r
ub
且γ
ku
为用户速率的辅助变量,γ
ub
为无人机速率的辅助变量。
[0056]
在本发明的(1)步骤中,所述的ω
los
取值为1~1.4,ω
nlos
取值为20~26。
[0057]
在本发明的(1)步骤中,所述的c0取值为0.56~0.63,d0取值为0.09~0.13。
[0058]
在本发明的(1)步骤中,所述的β1初值取值最佳为0.5,β2初值取值最佳为0.5。
[0059]
本发明与现有技术相比,具有以下有益效果:
[0060]
1)本发明优化了无人机的空间位置,采用了粒子群优化方法确定解无人机空间位置优化的技术问题,提高了无人机到基站链路的速率。
[0061]
2)本发明的无人机空间位置优化方法与现有的方法相比,经验证,在无人机传输功率为1.2w时,速率提升了4
×
104bps;与无人机空间位置随机生成的方法相比,速率提升了6
×
104bps;与不优化带宽分配因子和用户传输功率的方法相比,速率提升了1
×
105bps。
附图说明
[0062]
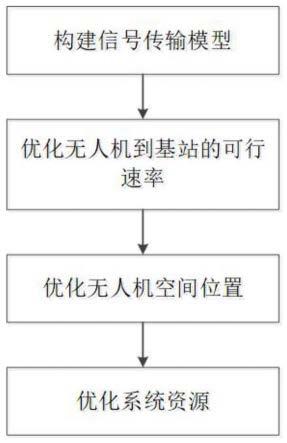
图1是本发明实施例1的流程图。
[0063]
图2是本发明实施例1无人机传输功率与速率关系在不同条件的对比仿真实验结果图。
具体实施方式
[0064]
下面结合附图和具体实施例对本发明进一步说明,但本发明不限于下述的实施例。
[0065]
实施例1
[0066]
本实施例的无人机空间位置和系统资源分配的联合优化方法由下述步骤组成(参见图1):
[0067]
(1)构建信号传输模型
[0068]
按下式确定空对地链路的信道增益h
mn
:
[0069][0070]
p
nlos,mn
=1-p
los,mn
[0071][0072]
其中,mn表示用户k到无人机u的链路或无人机u到基站b的链路,ρ0为单位信道增益,ρ0取值为-70~100db,本实施例ρ0取值为-80db,d
mn
为节点m与节点n之间的距离、且不为零,ω
los
为视距的额外路径损耗,ω
nlos
为非视距的额外路径损耗,ω
los
取值为1~1.4,ω
nlos
取值为20~26,本实施例的ω
los
取值为1.2,ω
nlos
取值为23。
[0073]
p
los,mn
为视距发生的概率,p
nlos,mn
为非视距发生的概率,c0和d0均为常数,c0取值为0.56~0.63,d0取值为0.09~0.13,本实施例的c0取值为0.60,d0取值为0.11,θ
mn
为节点m与节点n之间的连线与地面的夹角。在第一阶段,所有的地面用户k共享频谱资源,k为有限正整数,按下式确定用户k到无人机u的可行速率r
ku
:
[0074][0075]
其中,b
t
为系统可用带宽,b
t
取值为1~1.5mhz,本实施例的b
t
取值为1.2mhz,β1是第一阶段的带宽分配因子,β1∈(0,1),本实施例的β1初值取值为0.5,pk是用户k的传输功
率,pj,j∈((k 1),k)是用户j的传输功率,h
ku
为用户k到无人机u的信道增益,h
ju
为用户j到无人机u的信道增益,n0为单位信道噪声功率,取值为-169dbm/hz;按下式确定无人机u到基站b的可行速率r
ub
:
[0076][0077]
其中β2为第二阶段的带宽分配因子,β2∈(0,1),(β1 β2)∈(0,1],本实施例的β2初值取值为0.5,h
ub
为无人机u到基站b的信道增益,pu是无人机u的传输功率,pu取值范围为0.7~1.2w。本实施例的pu取值范围为1.0w。
[0078]
(2)优化无人机到基站的可行速率
[0079]
按下式优化无人机u到基站b的可行速率r
ub
:
[0080][0081]
优化条件如下:
[0082][0083]
0<β1<1
[0084]
0<β2<1
[0085]
0<β1 β2≤1
[0086][0087]
min{xk}≤xu≤max{xk}
[0088]
min{yk}≤yu≤max{yk}
[0089]hmin
≤hu≤h
max
[0090]
其中,β1、β2的取值与(1)步骤相同,表示对任意用户k,p
max
为用户的最大传输功率,(xu,yu,hu)是无人机u的空间位置,(xk,yk)是用户k的水平位置,h
min
是无人机u的最低高度,h
max
是无人机u的最高高度;将优化无人机u到基站b的可行速率分为优化无人机u空间位置和优化系统资源,通过粒子群优化方法求解无人机的最优空间位置,将无人机的位置信息代入系统资源分配优化中最大化无人机到基站的速率,直到收敛。
[0091]
(3)优化无人机空间位置
[0092]
采用粒子群优化方法,按下式更新粒子速度v(t 1):
[0093]
v(t 1)=ωv(t) c1r1(t)[p(t)-x(t)] c2r2(t)[g-x(t)]
[0094]
其中,x(t)是第t次迭代的粒子群位置,v(t)为第t次迭代的粒子群速度,ω为惯性权重系数,c1和c2是学习因子,r1(t)和r2(t)均为第t次迭代的(0,1)之间的随机数,p(t)是第t次迭代的局部最优粒子群位置,g为全局最优粒子位置。
[0095]
按下式更新粒子位置x(t 1):
[0096]
x(t 1)=x(t) v(t 1)
[0097]
按下式更新粒子局部最优适应度值p
best
(n):
[0098]
p
best
(n)=max(p
best
(n),fit(n))
[0099][0100]
其中,n∈n,n为粒子总数且为有限正整数,fit(n)为第n个粒子的适应度值;按下式更新粒子全局最优适应度值g
best
:
[0101]gbest
=max(g
best
,fit(n))
[0102]
其中,n∈n,迭代次数t达到迭代总数t或全局最优适应度值g
best
收敛时停止迭代,t为有限正整数,得到无人机最优空间位置。
[0103]
(4)优化系统资源
[0104]
按下式优化系统资源β1,β2和pk:
[0105][0106]
优化条件如下:
[0107][0108]
0<β1<1
[0109]
0<β2<1
[0110]
0<β1 β2≤1
[0111]
0<r≤kα
[0112][0113][0114][0115][0116][0117]
其中,l为迭代次数,且为有限正整数,α=min(r
ku
),r为目标函数的辅助变量,r≤r
ub
且γ
ku
为用户速率的辅助变量,γ
ub
为无人机速率的辅助变量。
[0118]
完成无人机空间位置和系统资源分配的联合优化方法。
[0119]
实施例2
[0120]
本实施例的无人机空间位置和系统资源分配的联合优化方法由下述步骤组成:
[0121]
(1)构建信号传输模型
[0122]
按下式确定空对地链路的信道增益h
mn
:
[0123]
[0124]
p
nlos,mn
=1-p
los,mn
[0125][0126]
其中,mn表示用户k到无人机u的链路或无人机u到基站b的链路,ρ0为单位信道增益,ρ0取值为-70~100db,本实施例ρ0取值为-70db,d
mn
为节点m与节点n之间的距离、且不为零,ω
los
为视距的额外路径损耗,ω
nlos
为非视距的额外路径损耗,ω
los
取值为1~1.4,ω
nlos
取值为20~26,本实施例的ω
los
取值为1,ω
nlos
取值为20。
[0127]
p
los,mn
为视距发生的概率,p
nlos,mn
为非视距发生的概率,c0和d0均为常数,c0取值为0.56~0.63,d0取值为0.09~0.13,本实施例的c0取值为0.56,d0取值为0.09,θ
mn
为节点m与节点n之间的连线与地面的夹角。在第一阶段,所有的地面用户k共享频谱资源,k为有限正整数,按下式确定用户k到无人机u的可行速率r
ku
:
[0128][0129]
其中,b
t
为系统可用带宽,b
t
取值为1~1.5mhz,本实施例b
t
取值为1mhz,β1是第一阶段的带宽分配因子,β1∈(0,1),本实施例的β1初值取值为0.5,pk是用户k的传输功率,pj,j∈((k 1),k)是用户j的传输功率,h
ku
为用户k到无人机u的信道增益,h
ju
为用户j到无人机u的信道增益,n0为单位信道噪声功率,取值为-169dbm/hz;按下式确定无人机u到基站b的可行速率r
ub
:
[0130][0131]
其中β2为第二阶段的带宽分配因子,β2∈(0,1),(β1 β2)∈(0,1],本实施例的β2初值取值为0.5,h
ub
为无人机u到基站b的信道增益,pu是无人机u的传输功率,pu取值范围为0.7~1.2w,本实施例pu取值为0.7w。
[0132]
其它步骤与实施例1相同。完成无人机空间位置和系统资源分配的联合优化方法。
[0133]
实施例3
[0134]
本实施例的无人机空间位置和系统资源分配的联合优化方法由下述步骤组成:
[0135]
(1)构建信号传输模型
[0136]
按下式确定空对地链路的信道增益h
mn
:
[0137][0138]
p
nlos,mn
=1-p
los,mn
[0139][0140]
其中,mn表示用户k到无人机u的链路或无人机u到基站b的链路,ρ0为单位信道增益,ρ0取值为-70~100db,本实施例ρ0取值为-100db,d
mn
为节点m与节点n之间的距离、且不为零,ω
los
为视距的额外路径损耗,ω
nlos
为非视距的额外路径损耗,ω
los
取值为1~1.4,ω
nlos
取值为20~26,本实施例的ω
los
取值为1.4,ω
nlos
取值为26,p
los,mn
为视距发生的概率,
p
nlos,mn
为非视距发生的概率,c0和d0均为常数,c0取值为0.56~0.63,d0取值为0.09~0.13,本实施例的c0取值为0.63,d0取值为0.13,θ
mn
为节点m与节点n之间的连线与地面的夹角。在第一阶段,所有的地面用户k共享频谱资源,k为有限正整数,按下式确定用户k到无人机u的可行速率r
ku
:
[0141][0142]
其中,b
t
为系统可用带宽,b
t
取值为1~1.5mhz,本实施例b
t
取值为1.5mhz,β1是第一阶段的带宽分配因子,β1∈(0,1),本实施例的β1初值取值为0.3,pk是用户k的传输功率,pj,j∈((k 1),k)是用户j的传输功率,h
ku
为用户k到无人机u的信道增益,h
ju
为用户j到无人机u的信道增益,n0为单位信道噪声功率,取值为-169dbm/hz;按下式确定无人机u到基站b的可行速率r
ub
:
[0143][0144]
其中β2为第二阶段的带宽分配因子,β2∈(0,1),(β1 β2)∈(0,1],本实施例的β2初值取值为0.7,h
ub
为无人机u到基站b的信道增益,pu是无人机u的传输功率,pu取值范围为0.7~1.2w,本实施例的pu取值范围为1.2w。
[0145]
其它步骤与实施例1相同。完成无人机空间位置和系统资源分配的联合优化方法。
[0146]
为了验证本发明的有益效果,发明人采用本发明实施例1的无人机空间位置和系统资源分配的联合优化方法与b.hu,l.wang,s.chen,j.cui and l.chen,"an uplink throughput optimization scheme for uav-enabled urban emergency communications,"in ieee internet of things journal,vol.9,no.6,pp.4291-4302,15march15,2022(以下简称对比方案1)、无人机空间位置随机生成的方法(以下简称对比方案2)、不优化带宽分配因子和用户传输功率(以下简称对比方案3)进行了对比仿真实验,实验结果见图2,图2显示了无人机传输功率与速率关系。由图2可见,在无人机传输功率为1.2w时,本发明与对比方案1方法相比,速率提升了4
×
104bps;与对比方案2方法相比,速率提升了6
×
104bps;与对比方案3方法相比,速率提升了1
×05
bps。本发明的速率优于对比方案1、对比方案2、对比方案3。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。