技术特征:
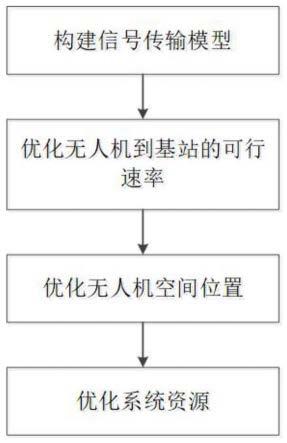
1.一种无人机空间位置和系统资源分配的联合优化方法,其特征在于它是由下述步骤组成:(1)构建信号传输模型按下式确定空对地链路的信道增益h
mn
:p
nlos,mn
=1-p
los,mn
其中,mn表示用户k到无人机u的链路或无人机u到基站b的链路,ρ0为单位信道增益,ρ0取值为-70~100db,d
mn
为节点m与节点n之间的距离、且不为零,ω
los
为视距的额外路径损耗,ω
nlos
为非视距的额外路径损耗,p
los,mn
为视距发生的概率,p
nlos,mn
为非视距发生的概率,c0和d0均为常数,θ
mn
为节点m与节点n之间的连线与地面的夹角;在第一阶段,所有的地面用户k共享频谱资源,k为有限正整数,按下式确定用户k到无人机u的可行速率r
ku
:其中,b
t
为系统可用带宽,b
t
取值为1~1.5mhz,β1是第一阶段的带宽分配因子,β1∈(0,1),p
k
是用户k的传输功率,p
j
,j∈((k 1),k)是用户j的传输功率,h
ku
为用户k到无人机u的信道增益,h
ju
为用户j到无人机u的信道增益,n0为单位信道噪声功率,取值为-169dbm/hz;按下式确定无人机u到基站b的可行速率r
ub
:其中β2为第二阶段的带宽分配因子,β2∈(0,1),(β1 β2)∈(0,1],h
ub
为无人机u到基站b的信道增益,p
u
是无人机u的传输功率,p
u
取值范围为0.7~1.2w;(2)优化无人机到基站的可行速率按下式优化无人机u到基站b的可行速率r
ub
:优化条件如下:0<β1<10<β2<10<β1 β2≤1min{x
k
}≤x
u
≤max{x
k
}
min{y
k
}≤y
u
≤max{y
k
}h
min
≤h
u
≤h
max
其中,表示对任意用户k,p
max
为用户的最大传输功率,(x
u
,y
u
,h
u
)是无人机u的空间位置,(x
k
,y
k
)是用户k的水平位置,h
min
是无人机u的最低高度,h
max
是无人机u的最高高度;将优化无人机u到基站b的可行速率分为优化无人机u空间位置和优化系统资源,通过粒子群优化方法求解无人机的最优空间位置,将无人机的位置信息代入系统资源分配优化中最大化无人机到基站的速率,直到收敛;(3)优化无人机空间位置采用粒子群优化方法,按下式更新粒子速度v(t 1):v(t 1)=ωv(t) c1r1(t)[p(t)-x(t)] c2r2(t)[g-x(t)]其中,x(t)是第t次迭代的粒子群位置,v(t)为第t次迭代的粒子群速度,ω为惯性权重系数,c1和c2是学习因子,r1(t)和r2(t)均为第t次迭代的(0,1)之间的随机数,p(t)是第t次迭代的局部最优粒子群位置,g为全局最优粒子位置;按下式更新粒子位置x(t 1):x(t 1)=x(t) v(t 1)按下式更新粒子局部最优适应度值p
best
(n):p
best
(n)=max(p
best
(n),fit(n))其中,n∈n,n为粒子总数且为有限正整数,fit(n)为第n个粒子的适应度值;按下式更新粒子全局最优适应度值g
best
:g
best
=max(g
best
,fit(n))其中,n∈n,迭代次数t达到迭代总数t或全局最优适应度值g
best
收敛时停止迭代,t为有限正整数,得到无人机最优空间位置;(4)优化系统资源按下式优化系统资源β1,β2和p
k
:优化条件如下:0<β1<10<β2<10<β1 β2≤10<r≤kα0<r≤kα
其中,l为迭代次数,且为有限正整数,α=min(r
ku
),r为目标函数的辅助变量,r≤r
ub
且γ
ku
为用户速率的辅助变量,γ
ub
为无人机速率的辅助变量。2.根据权利要求1所述的无人机空间位置和系统资源分配的联合优化方法,其特征在于:在(1)步骤中,所述的ω
los
取值为1~1.4,ω
nlos
取值为20~26。3.根据权利要求1所述的无人机空间位置和系统资源分配的联合优化方法,其特征在于:在(1)步骤中,所述的c0取值为0.56~0.63,d0取值为0.09~0.13。4.根据权利要求1所述的无人机空间位置和系统资源分配的联合优化方法,其特征在于:在(1)步骤中,所述的β1初值取值为0.5,β2初值取值为0.5。
技术总结
一种无人机空间位置和系统资源分配的联合优化方法,由构建信号传输模型、优化无人机到基站的可行速率、优化无人机空间位置、优化系统资源步骤组成。本发明在满足功率约束、用户服务质量约束和无人机空间位置约束的前提下,联合优化了无人机空间位置、系统可用带宽分配因子和用户传输功率;由于本发明采用了粒子群方法,优化了无人机的空间位置,提高了无人机到基站链路的速率。人机到基站链路的速率。人机到基站链路的速率。
技术研发人员:任远 曹欣欣 张雪薇 江帆 王军选 卢光跃
受保护的技术使用者:西安邮电大学
技术研发日:2022.07.22
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。