1.本实用新型涉及一种瞄准镜,具体涉及一种集成信息采集和视景显示的模拟迫击炮瞄准镜。
背景技术:
2.迫击炮是支援和伴随步兵作战的一种有效的压制兵器,作为对遮蔽目标实施曲射的火炮,是步兵极为重要的常规兵器。其质量轻、体积小、机动性强,而且结构简单,操作方便,造价低廉,世界各国大量装备,在现代战争中依然是一种不可或缺的武器。对部队来说,迫击炮打得快、打得准是重要的要求,而其前提是迅速获得射击诸元、快速瞄准射击。因此,迫击炮需要装配瞄准镜,以辅助迫击炮实现快速瞄准。
3.准确获取瞄准镜的姿态,是辅助迫击炮实现快速瞄准的基础和前提。现有技术中,瞄准镜姿态主要依靠人工读取,瞄准镜姿态获取的精度有限,不利于其辅助迫击炮快速瞄准。
技术实现要素:
4.针对现有技术存在的缺陷,本实用新型提供一种集成信息采集和视景显示的模拟迫击炮瞄准镜,可有效解决上述问题。
5.本实用新型采用的技术方案如下:
6.本实用新型提供一种集成信息采集和视景显示的模拟迫击炮瞄准镜,包括:目镜单元(100)和支撑单元(200);
7.所述目镜单元(100)包括目镜壳体(101)、数据采集器(102)、目镜镜筒(103)、目镜组件(104)和目镜姿态采集传感器(105);所述目镜壳体(101)的一侧固定安装所述目镜镜筒(103),所述目镜镜筒(103)内设置所述目镜组件(104);所述目镜壳体(101)的内部安装所述数据采集器(102)和所述目镜姿态采集传感器(105);
8.所述支撑单元(200)包括支撑座体(201)、支撑座俯仰调节采集组件(202)和支撑座方向调节采集组件(203);其中,所述支撑座俯仰调节采集组件(202)和所述支撑座方向调节采集组件(203)均安装于所述支撑座体(201)的内部,所述支撑座俯仰调节采集组件(202)包括支撑座俯仰调节机构和支撑座俯仰采集编码器(2021);所述支撑座方向调节采集组件(203)包括支撑座方向调节机构和支撑座方向采集编码器(2031);
9.所述目镜壳体(101)安装于所述支撑座体(201)的上方,相动于所述支撑座体(201)可进行俯仰动作;
10.所述支撑座俯仰采集编码器(2021)、所述支撑座方向采集编码器(2031)和所述目镜姿态采集传感器(105),均与所述数据采集器(102)连接;所述数据采集器(102)配置有通讯接口。
11.优选的,所述目镜组件(104)包括显示器(1041)和放大镜组(1042);所述目镜镜筒(103)内,按从内向外的方向,依次安装所述显示器(1041)和所述放大镜组(1042)。
12.优选的,所述显示器(1041)为oled微型显示屏。
13.优选的,所述支撑座俯仰采集编码器(2021)和所述支撑座方向采集编码器(2031),均为旋转编码器。
14.优选的,所述支撑座俯仰调节机构包括表尺转螺(2022)、俯仰蜗杆(2023)和俯仰蜗轮(2024);
15.所述俯仰蜗杆(2023)的一端与所述表尺转螺(2022)固定;所述俯仰蜗杆(2023)的另一端与所述支撑座俯仰采集编码器(2021)的编码器轴固定;所述俯仰蜗杆(2023)的中部与所述俯仰蜗轮(2024)啮合;所述俯仰蜗轮(2024)与所述支撑座体(201)连接。
16.优选的,所述俯仰蜗杆(2023)的一端沿轴向开设与所述支撑座俯仰采集编码器(2021)的编码器轴相匹配的俯仰蜗杆轴孔(2025);所述支撑座俯仰采集编码器(2021)的编码器轴插入到所述俯仰蜗杆轴孔(2025)中;
17.所述俯仰蜗杆(2023)的一端沿径向开设与所述俯仰蜗杆轴孔(2025)垂直且连通的俯仰销孔,所述俯仰销孔内安装俯仰螺钉(2026),所述俯仰螺钉(2026)的一端顶于所述支撑座俯仰采集编码器(2021)的编码器轴外面,进而实现所述支撑座俯仰采集编码器(2021)的编码器轴和所述俯仰蜗杆(2023)的固定。
18.优选的,所述支撑座方向调节机构包括方向转螺(2032)、方向蜗杆(2033)和方向蜗轮(2034);
19.所述方向蜗杆(2033)的一端与所述方向转螺(2032)固定;所述方向蜗杆(2033)的另一端与所述支撑座方向采集编码器(2031)的编码器轴固定;所述方向蜗杆(2033)的中部与所述方向蜗轮(2034)啮合;所述方向蜗轮(2034)与所述支撑座体(201)连接。
20.优选的,所述方向蜗杆(2033)的一端沿轴向开设与所述支撑座方向采集编码器(2031)的编码器轴相匹配的方向蜗杆轴孔(2035);所述支撑座方向采集编码器(2031)的编码器轴插入到所述方向蜗杆轴孔(2035)中;
21.所述方向蜗杆(2033)的一端沿径向开设与所述方向蜗杆轴孔(2035)垂直且连通的方向销孔,所述方向销孔内安装方向螺钉(2036),所述方向螺钉(2036)的一端顶于所述支撑座方向采集编码器(2031)的编码器轴外面,进而实现所述支撑座方向采集编码器(2031)的编码器轴和所述方向蜗杆(2033)的固定。
22.本实用新型提供的集成信息采集和视景显示的模拟迫击炮瞄准镜具有以下优点:
23.(1)数据采集快速、准确:本实用新型通过在瞄准镜中嵌入支撑座俯仰采集编码器和支撑座方向采集编码器,实时采集瞄准镜支撑座俯仰角和方向角;嵌入目镜姿态采集传感器,采集目镜姿态信息;从而得到瞄准镜准确的姿态信息。这种方法采集到的姿态信息快速、准确、合理,有效解决了现有技术的弊端;
24.(2)本实用新型在oled屏前安装放大镜组,能够清晰显示上位机传来的视景信息。
25.(3)本实用新型设计巧妙,结构紧凑,布局合理,集成度高。集瞄准镜姿态信息采集、处理及视景显示于一体。
附图说明
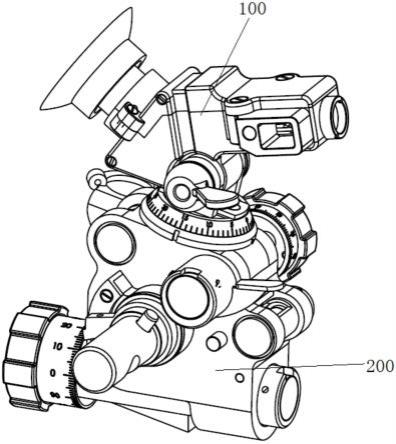
26.图1为本实用新型提供的集成信息采集和视景显示的模拟迫击炮瞄准镜的立体结构示意图;
27.图2为本实用新型提供的集成信息采集和视景显示的模拟迫击炮瞄准镜的剖面图;
28.图3为本实用新型提供的目镜单元的剖面图;
29.图4为本实用新型提供的目镜单元中显示器和放大镜组的装配图;
30.图5为本实用新型提供的支撑座俯仰调节采集组件的立体图;
31.图6为本实用新型提供的支撑座俯仰调节采集组件的剖面图;
32.图7为本实用新型提供的支撑座方向调节采集组件的立体图;
33.图8为本实用新型提供的支撑座方向调节采集组件的剖面图。
具体实施方式
34.为了使本实用新型所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
35.本实用新型提供一种集成信息采集和视景显示的模拟迫击炮瞄准镜,能够准确采集瞄准镜的姿态信息,具有采集精度高的优点,从而有利于其辅助迫击炮快速瞄准。
36.参考图1和图2,本实用新型提供一种集成信息采集和视景显示的模拟迫击炮瞄准镜,包括:目镜单元100和支撑单元200。
37.目镜单元100装配于支撑单元200的上部,可相对于支撑单元200进行俯仰运动。
38.本技术中,可分别采集目镜单元100的姿态和支撑单元200的姿态。
39.下面对目镜单元100和支撑单元200分别详细介绍:
40.(一)目镜单元100
41.参考图2、图3和图4,目镜单元100包括目镜壳体101、数据采集器102、目镜镜筒103、目镜组件104和目镜姿态采集传感器105;
42.目镜壳体101的一侧固定安装目镜镜筒103,目镜镜筒103内设置目镜组件104;其中,目镜组件104包括显示器1041和放大镜组1042;具体的,目镜镜筒103内,按从内向外的方向,依次安装显示器1041和放大镜组1042。显示器1041用于将上位机下发的场景显示,并通过放大镜组1042放大后,呈现到人眼。
43.目镜壳体101的内部安装数据采集器102和目镜姿态采集传感器105。
44.目镜姿态采集传感器105可采用三轴加速度计,用于采集目镜单元100的俯仰角和方向角,并将采集到的信息传输给数据采集器102。
45.数据采集器102具有通讯单元,用于与上位机通信,将采集到的相关信息上传给上位机,实现瞄准镜和上位机之间的通信。
46.(二)支撑单元200
47.支撑单元200用于装配到迫击炮上面。支撑单元200包括支撑座体201、支撑座俯仰调节采集组件202和支撑座方向调节采集组件203;
48.支撑座体201用于装配目镜单元100,具体的,支撑座体201的上方安装目镜壳体101,使目镜壳体101相动于支撑座体201可进行俯仰动作。
49.其中,支撑座俯仰调节采集组件202和支撑座方向调节采集组件203均安装于支撑座体201的内部,支撑座俯仰调节采集组件202包括支撑座俯仰调节机构和支撑座俯仰采集
编码器2021;通过支撑座俯仰调节机构调节支撑座体201的俯仰角,通过支撑座俯仰采集编码器2021采集支撑座体201的俯仰角;
50.支撑座方向调节采集组件203包括支撑座方向调节机构和支撑座方向采集编码器2031;通过支撑座方向调节机构调节支撑座体201的方向角,并通过支撑座方向采集编码器2031采集支撑座体201的方向角。
51.支撑座俯仰采集编码器2021、支撑座方向采集编码器2031和目镜姿态采集传感器105,均与数据采集器102连接;数据采集器102配置有通讯接口。因此,数据采集器102可将采集到的支撑座俯仰角、支撑座方向角和目镜姿态,并上传给上位机。
52.作为一种具体实现方式,支撑座俯仰采集编码器2021和支撑座方向采集编码器2031,均为旋转编码器。
53.下面对支撑座俯仰调节采集组件202和支撑座方向调节采集组件203详细介绍:
54.(2.1)支撑座俯仰调节采集组件202
55.参考图5和图6,支撑座俯仰调节机构包括表尺转螺2022、俯仰蜗杆2023和俯仰蜗轮2024;
56.俯仰蜗杆2023的一端与表尺转螺2022固定;俯仰蜗杆2023的另一端与支撑座俯仰采集编码器2021的编码器轴固定;俯仰蜗杆2023的中部与俯仰蜗轮2024啮合;俯仰蜗轮2024与支撑座体201连接。
57.因此,当旋转表尺转螺2022时,带动俯仰蜗杆2023旋转;当俯仰蜗杆2023旋转时,一方面,通过与其啮合的俯仰蜗轮2024带动支撑座体201整体进行俯仰运动,从而改变支撑座体201的俯仰姿态;另一方面,在俯仰蜗杆2023旋转时,带动支撑座俯仰采集编码器2021的编码器轴同步旋转,因此,支撑座俯仰采集编码器2021的本体可采集到俯仰角。
58.本技术对支撑座俯仰采集编码器2021与支撑座俯仰调节机构的装配方式进行创新,采用以下方式,具有支撑座俯仰采集编码器2021装配简单的优点:
59.俯仰蜗杆2023的一端沿轴向开设与支撑座俯仰采集编码器2021的编码器轴相匹配的俯仰蜗杆轴孔2025;支撑座俯仰采集编码器2021的编码器轴插入到俯仰蜗杆轴孔2025中;
60.俯仰蜗杆2023的一端沿径向开设与俯仰蜗杆轴孔2025垂直且连通的俯仰销孔,俯仰销孔内安装俯仰螺钉2026,俯仰螺钉2026的一端顶于支撑座俯仰采集编码器2021的编码器轴外面,进而实现支撑座俯仰采集编码器2021的编码器轴和俯仰蜗杆2023的固定。
61.(2.2)支撑座方向调节采集组件203
62.参考图7和图8,支撑座方向调节机构包括方向转螺2032、方向蜗杆2033和方向蜗轮2034;
63.方向蜗杆2033的一端与方向转螺2032固定;方向蜗杆2033的另一端与支撑座方向采集编码器2031的编码器轴固定;方向蜗杆2033的中部与方向蜗轮2034啮合;方向蜗轮2034与支撑座体201连接。
64.因此,当旋转方向转螺2032时,带动方向蜗杆2033旋转;当方向蜗杆2033旋转时,一方面,通过与其啮合的方向蜗轮2034带动支撑座体201整体进行水平转动运动,从而改变支撑座体201的方向姿态;另一方面,在方向蜗杆2033旋转时,带动支撑座方向采集编码器2031的编码器轴同步旋转,因此,支撑座方向采集编码器2031的本体可采集到方向角。
65.本技术对支撑座方向采集编码器2031与支撑座方向调节机构的装配方式进行创新,采用以下方式,具有支撑座方向采集编码器2031装配简单的优点:
66.方向蜗杆2033的一端沿轴向开设与支撑座方向采集编码器2031的编码器轴相匹配的方向蜗杆轴孔2035;支撑座方向采集编码器2031的编码器轴插入到方向蜗杆轴孔2035中;
67.方向蜗杆2033的一端沿径向开设与方向蜗杆轴孔2035垂直且连通的方向销孔,方向销孔内安装方向螺钉2036,方向螺钉2036的一端顶于支撑座方向采集编码器2031的编码器轴外面,进而实现支撑座方向采集编码器2031的编码器轴和方向蜗杆2033的固定。
68.本实用新型提供一种集成信息采集和视景显示的模拟迫击炮瞄准镜,其工作原理为:
69.(1)将模拟迫击炮瞄准镜装配到迫击炮上面;对模拟迫击炮瞄准镜的支撑单元200的姿态进行调整,并分别通过支撑座俯仰采集编码器和支撑座方向采集编码器,分别采集到支撑座俯仰角和支撑座方向角;
70.调节目镜单元100相对于支撑单元200的俯仰姿态,并通过目镜姿态采集传感器采集到目镜姿态,包括目镜俯仰角和目镜方向角;其中,由于目镜单元100相对于支撑单元200仅进行俯仰调节,因此,目镜方向角和支撑座方向角基本相同;
71.(2)然后,支撑座俯仰角、支撑座方向角、目镜俯仰角和目镜方向角,均上传给数据采集器;数据采集器再通过串口将采集到的参数发送给上位机;
72.(3)上位机接收数据采集器采集到的相关参数,上位机运行模拟训练等战场场景,在瞄准镜相应姿态下,获得视野中的视频场景,并通过显示器1041显示;
73.其中,显示器1041可采用微型oled显示屏,该显示屏集成有图像驱动控制电路,通过hdmi线与上位机连接,可以实时显示上位机的视频信息。
74.(4)显示器1041显示的视频信息,通过放大镜组放大后,模拟出相当于2米远处50英寸的画面,供使用者观察。
75.本实用新型提供一种集成信息采集和视景显示的模拟迫击炮瞄准镜,具有以下创新设计:
76.(1)支撑座俯仰采集编码器的安装位置选择及结构设计
77.经过充分论证,支撑座俯仰采集编码器安装在表尺转螺的同轴对面,是最优的方案,既能有效采集数据信息,又不会影响表尺转螺的操作。
78.支撑座俯仰采集编码器的轴嵌入到俯仰蜗杆2023的轴孔中,在俯仰蜗杆2023上预先安装一个销钉,其功能是顶住支撑座俯仰采集编码器的轴,限制支撑座俯仰采集编码器的轴自由转动,保证其与俯仰蜗杆2023一起转动。
79.(2)支撑座方向采集编码器的安装位置选择及结构设计
80.经过充分论证,支撑座方向采集编码器安装在方向转螺的对面是最优的方案,既能有效采集数据信息,又不会影响方向转螺的转动操作。支撑座方向采集编码器的安装采用嵌入式,支撑座方向采集编码器的轴嵌入到方向蜗杆轴中,在方向蜗杆轴上预先安装一个销钉,其功能是顶住支撑座方向采集编码器的轴,限制支撑座方向采集编码器的轴自由转动,保证其与方向蜗杆轴一起转动。
81.(3)数据采集器结构设计
82.设计制作数据采集器盒,用于放置oled显示屏和数据采集器,目镜姿态采集传感器可集成在数据采集器上,采集到的各项数据通过串口传递给上位机。数据采集器留有usb接口,通信线可插拔,不影响瞄准镜的拆装练习。
83.(4)放大镜组
84.放大镜组由两组镜片组成,镜片间的距离可以微调以适应不同人员的需要。
85.本实用新型提供一种集成信息采集和视景显示的模拟迫击炮瞄准镜,具有以下优点:
86.(1)数据采集快速、准确:本实用新型通过在瞄准镜中嵌入支撑座俯仰采集编码器和支撑座方向采集编码器,实时采集瞄准镜支撑座俯仰角和方向角;嵌入目镜姿态采集传感器,采集目镜姿态信息;从而得到瞄准镜准确的姿态信息。这种方法采集到的姿态信息快速、准确、合理,有效解决了现有技术的弊端;
87.(2)本实用新型在oled屏前安装放大镜组,能够清晰显示上位机传来的视景信息。
88.(3)本实用新型设计巧妙,结构紧凑,布局合理,集成度高。集瞄准镜姿态信息采集、处理及视景显示于一体。
89.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。