技术特征:
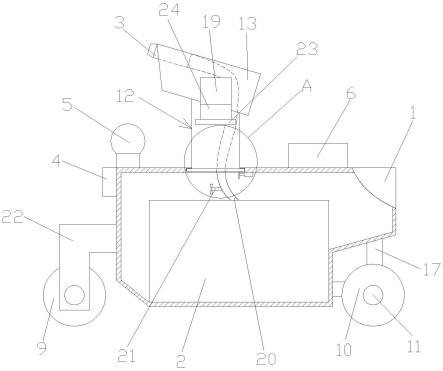
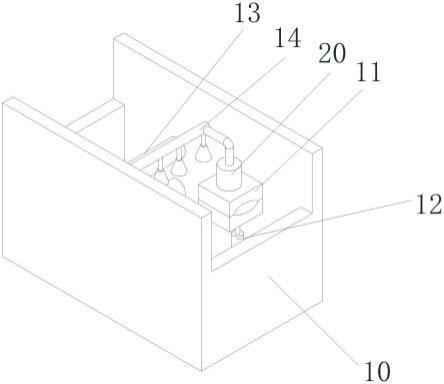
1.一种消防灭火机器人,其特征在于:包括机器人车体、均设置在所述机器人车体上且用于灭火的灭火机构和用于监测所述机器人车体周围环境的监测模块;所述机器人车体包括车体外壳(1)和设置在车体外壳(1)下部且用于带动车体外壳(1)移动的行走机构;所述灭火机构包括设置在车体外壳(1)内的灭火器(2)、与灭火器(2)连接且用于喷洒灭火器(2)内灭火剂的灭火雾化喷嘴(3),以及设置在车体外壳(1)顶部且用于调节灭火雾化喷嘴(3)喷洒高度和喷洒方向的安装调节座;所述监测模块包括均设置在车体外壳(1)顶部的红外避障模块(4)、监控摄像头(5)和箱体(6),所述箱体(6)内设置有电子线路板,所述电子线路板上集成有微控制器(7)和与微控制器(7)相接的无线通信模块(8),所述红外避障模块(4)的输出端与微控制器(7)的输入端连接,所述监控摄像头(5)的输出端与无线通信模块(8)相接。2.按照权利要求1所述的一种消防灭火机器人,其特征在于:所述行走机构包括均设置在车体外壳(1)下部的前行走轮(9)和后行走轮(10),以及用于驱动后行走轮(10)行走的行走驱动电机(11),所述前行走轮(9)、后行走轮(10)和行走驱动电机(11)的数量均为两个,两个所述后行走轮(10)与两个行走驱动电机(11)一一对应,所述行走驱动电机(11)由微控制器(7)进行控制。3.按照权利要求1所述的一种消防灭火机器人,其特征在于:所述安装调节座包括设置在车体外壳(1)顶部的方向调节筒(12)和与方向调节筒(12)铰接的高度调节筒(13),以及用于驱动方向调节筒(12)转动的第一驱动器和用于驱动高度调节筒(13)转动的第二驱动器。4.按照权利要求3所述的一种消防灭火机器人,其特征在于:所述方向调节筒(12)与车体外壳(1)呈垂直布设,所述方向调节筒(12)包括筒体(12-1)和设置在筒体(12-1)底部的环形卡板(12-2),以及多个设置在环形卡板(12-2)底部的齿槽(12-3),多个所述齿槽(12-3)沿环形卡板(12-2)的圆周方向布设在环形卡板(12-2)的底部;所述第一驱动器包括设置在车体外壳(1)内的第一驱动电机(14),以及套设在第一驱动电机(14)的输出轴上且与齿槽(12-3)啮合的驱动齿轮(15),所述第一驱动电机(14)由微控制器(7)进行控制。5.按照权利要求4所述的一种消防灭火机器人,其特征在于:所述车体外壳(1)的顶板上开设有用于连通车体外壳(1)和方向调节筒(12)的通孔(16),所述通孔(16)的内侧壁上沿其圆周方向开设有供环形卡板(12-2)安装的卡槽,所述环形卡板(12-2)与所述卡槽滑动配合。6.按照权利要求3所述的一种消防灭火机器人,其特征在于:所述高度调节筒(13)通过销轴(18)与方向调节筒(12)铰接,所述方向调节筒(12)与销轴(18)转动配合,所述高度调节筒(13)与销轴(18)固定连接;所述第二驱动器包括设置在方向调节筒(12)上的第二驱动电机(19),所述第二驱动电机(19)由微控制器(7)进行控制,所述销轴(18)套设在第二驱动电机(19)的输出轴上。7.按照权利要求1所述的一种消防灭火机器人,其特征在于:所述灭火雾化喷嘴(3)通过导管(20)与灭火器(2)连通,所述导管(20)上设置有用于控制导管(20)内液体流通的电磁阀(21),所述电磁阀(21)由微控制器(7)进行控制。
8.按照权利要求3所述的一种消防灭火机器人,其特征在于:所述灭火雾化喷嘴(3)设置在高度调节筒(13)内,且灭火雾化喷嘴(3)伸出高度调节筒(13)。
技术总结
本实用新型公开了一种消防灭火机器人,包括机器人车体、均设置在机器人车体上且用于灭火的灭火机构和用于监测机器人车体周围环境的监测模块。本实用新型结构简单、设计合理,通过设置行走机构带动车体外壳在待灭火区域行走,对待灭火区域进行全方位灭火,解决了现有灭火设备只能安装在固定位置对待灭火区域灭火的问题,灭火效果好;通过设置灭火雾化喷嘴对灭火器内的灭火剂进行雾化后喷洒至待灭火区域,灭火效率高;通过设置安装调节座为灭火雾化喷嘴提供安装位置,并实现灭火雾化喷嘴喷洒方向和喷洒高度的调节,便于该机器人对待灭火区域进行灭火,灭火范围广。灭火范围广。灭火范围广。
技术研发人员:李晓贤 侯健 朱康熹 王刚 王奔 王杰 杜梦岩
受保护的技术使用者:西安中核核仪器股份有限公司
技术研发日:2021.08.31
技术公布日:2022/11/28
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。