技术特征:
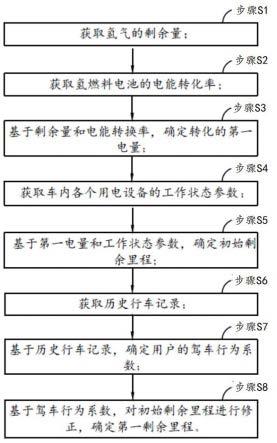
1.一种氢电整车控制器,其特征在于,包括:剩余里程规划模块;所述剩余里程规划模块执行如下操作:获取氢气的剩余量;获取氢燃料电池的电能转化率;基于所述剩余量和所述电能转换率,确定转化的第一电量;获取车内各个用电设备的工作状态参数;基于所述第一电量和所述工作状态参数,确定初始剩余里程;获取历史行车记录;基于所述历史行车记录,确定用户的驾车行为系数;基于所述驾车行为系数,对所述初始剩余里程进行修正,确定第一剩余里程。2.如权利要求1所述的氢电整车控制器,其特征在于,所述剩余里程规划模块基于所述第一电量和所述工作状态参数,确定初始剩余里程,执行如下操作:基于预设的第一参数化模板对所述第一电量进行参数化,获取第一参数值;基于各个所述工作状态参数对应的预设的第二参数化模板对各个所述工作状态参数进行参数化,获取各个工作状态参数对应的第二参数值;基于所述第一参数值和所述第二参数值,确定状态参数集;获取预设的里程预测库;将所述状态参数集与所述里程预测库中各个预测参数集匹配;获取与所述状态参数集匹配的所述预测参数集对应关联的里程值,作为所述初始剩余里程。3.如权利要求1所述的氢电整车控制器,其特征在于,所述剩余里程规划模块获取氢燃料电池的电能转化率,执行如下操作:获取氢燃料电池的电能转化历史数据;解析所述电能转化历史数据,确定电能转化率。4.如权利要求1所述的氢电整车控制器,其特征在于,所述剩余里程规划模块基于所述历史行车记录,确定用户的驾车行为系数,执行如下操作:确定所述历史行车记录中距离当前最近的行车记录的截至时间与当前时刻的差值是否在预设的时间阈值范围内以及行车记录的对应的时长是否大于预设的时长阈值;当都为是时,提取距离当前最近的行车记录作为第一待处理数据;解析所述第一待处理数据,确定路况信息和驾驶信息;基于预设的第一类特征提取模板,对所述路况信息进行特征提取,获取多个第一类特征;基于预设的第二类特征提取模板,对所述驾驶信息进行特征提取,获取多个第二类特征;基于多个所述第一类特征和多个所述第二类特征,构建所述第一待处理数据对应的第一特征集;获取预设的驾车行为分析库;将所述第一特征集与驾车行为分析库中各个标准行为分析集匹配;获取与所述第一特征集匹配的所述标准行为分析集关联的第一系数作为用户的驾车
行为系数;当不都为是时,按照预设采样规则对所述历史行车记录进行采样,获取多个第二待处理数据;解析各个所述第二待处理数据,确定各个所述第二待处理数据对应的路况信息和驾驶信息;基于预设的第一类特征提取模板,对所述路况信息进行特征提取,获取多个第一类特征;基于预设的第二类特征提取模板,对所述驾驶信息进行特征提取,获取多个第二类特征;基于多个所述第一类特征和多个所述第二类特征,构建各个所述第二待处理数据对应的第二特征集;获取预设的驾车行为分析库;将所述第二特征集与驾车行为分析库中各个标准行为分析集匹配;获取与所述第二特征集匹配的所述标准行为分析集关联的第一系数;获取各个所述第二待处理数据对应的权重;基于各个所述第二待处理数据对应的第一系数和权重,确定第二系数并将所述第二系数作为用户的驾车行为系数。5.如权利要求1所述的氢电整车控制器,其特征在于,还包括:加气建议模块;所述加气建议模块执行如下操作:接收用户的输入的出行计划;基于出行计划,规划对应所述出行计划的行驶路线;确定所述行驶路线对应的第一需求电量;当所述第一电量小于等于所述第一需求电量时,获取所述行驶路线周围的加气点分布情况,确定各个待选加气点;确定至各个待选加气点的加气路线;确定各个加气路线对应的第二需求电量;基于所述第二需求电量和所述第一电量,对所述待选加气点进行筛选,获取一次确定点;获取各个所述一次确定点的待加气的车辆的情况和采用一次确定点进行加气后的行驶路线变化情况;基于各个所述一次确定点的待加气的车辆的情况和采用一次确定点进行加气后的行驶路线变化情况,对各个所述一次确定点进行筛选,确定二次确定点;将任一所述二次确定点作为目标加气点;将所述目标加气点输出并同步输出基于所述目标加气点更新的行驶路线。6.如权利要求5所述的氢电整车控制器,其特征在于,所述加气建议模块还执行如下操作:当所述第一电量大于所述第一需求电量但小于所述第一需求电量的两倍时,确定所述出行计划对应的目标点是否为预设的目标库中的第一类目标点;当为第一类目标点时,获取所述出行计划对应的目标点周围的加气点分布情况,确定
从目标点出发的路线最短的加气点对应的第三需求电量;当所述第一电量与所述第一需求电量的差值小于第三需求电量时,输出预设的第一提示信息以及对应的第一待确认信息;当接收到第一待确认信息的确定时,在出行计划对应的行驶路线周围的加气点确定目标加气点并同步输出基于所述目标加气点更新的行驶路线;当所述第一电量与所述第一需求电量的差值等于第三需求电量时,将从目标点出发的路线最短的加气点作为目标加气点并在用户到达所述出行计划对应的目标点后输出开往所述目标加气点的加气路线;当所述第一电量与所述第一需求电量的差值大于第三需求电量时,获取用户是否有返程计划;当存在返程计划时,基于所述行驶路线确定返程路线;获取所述返程路线周围的加气点分布情况,确定各个待选加气点;确定至各个待选加气点的加气路线;确定各个加气路线对应的第二需求电量;基于所述第二需求电量和所述第一电量与所述第一需求电量的差值,对所述待选加气点进行筛选,获取一次确定点;获取各个所述一次确定点的待加气的车辆的情况和采用一次确定点进行加气后的行驶路线变化情况;基于各个所述一次确定点的待加气的车辆的情况和采用一次确定点进行加气后的行驶路线变化情况,对各个所述一次确定点进行筛选,确定二次确定点;将任一所述二次确定点作为目标加气点;将所述目标加气点输出并同步输出基于所述目标加气点更新的返程路线。7.如权利要求5所述的氢电整车控制器,其特征在于,所述一次确定点的待加气的车辆的情况,通过如下步骤确定:通过设置在所述一次确定点的第一图像采集设备获取所述一次确定点内的第一图像;基于所述第一图像,识别所述一次确定点内的现有的待加气的车辆的实际数量;基于所述一次确定点的历史待加气的车辆的数据对用户到达所述一次确定点时的待加气的车辆数据进行预测,获得预测数量;将所述实际数量和所述预测数量,作为所述一次确定点的待加气的车辆的情况。8.如权利要求7所述的氢电整车控制器,其特征在于,所述基于各个所述一次确定点的待加气的车辆的情况和采用一次确定点进行加气后的行驶路线变化情况,对各个所述一次确定点进行筛选,确定二次确定点,包括:基于所述实际数量和所述预测数量,查询预设的数量与第一评分值对照表,确定第一评分值;基于行驶路线的增加路程,查询预设的路程与第二评分值对照表,确定第二评分值;提取第一评分值和第二评分值的和值大于预设的评分阈值的所述一次确定作为所述二次确定点。9.如权利要求1所述的氢电整车控制器,其特征在于,还包括:剩余里程预测模块;所述剩余里程预测模块执行如下操作:
获取用户输入的本日行程计划;基于本日行程计划,确定行程路线;基于所述第一剩余里程和所述行程路线对应的里程,确定第二剩余里程并输出显示。10.如权利要求1所述的氢电整车控制器,其特征在于,还包括:策略调整模块,所述策略调整模块执行如下操作:基于所述第一电量和所述工作状态参数,确定策略调整参数集;基于策略调整参数集和预设的控制策略调整确定库,确定控制策略调整分析结果;解析所述控制策略调整分析结果,确定是否调整控制策略以及当需要调整时调整后的控制策略。
技术总结
本发明涉及氢燃料电池汽车控制器技术领域,特别涉及一种氢电整车控制器,包括:剩余里程规划模块;剩余里程规划模块执行如下操作:获取氢气的剩余量;获取氢燃料电池的电能转化率;基于剩余量和电能转换率,确定转化的第一电量;获取车内各个用电设备的工作状态参数;基于第一电量和工作状态参数,确定初始剩余里程;获取历史行车记录;基于历史行车记录,确定用户的驾车行为系数;基于驾车行为系数,对初始剩余里程进行修正,确定第一剩余里程。本发明的氢电整车控制器,根据氢气的剩余量以及用户的驾车习惯,确定还可行驶的里程,并显示给用户,方便用户对行程进行准确规划。方便用户对行程进行准确规划。方便用户对行程进行准确规划。
技术研发人员:米胜荣
受保护的技术使用者:新汽有限公司
技术研发日:2022.10.27
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。