技术特征:
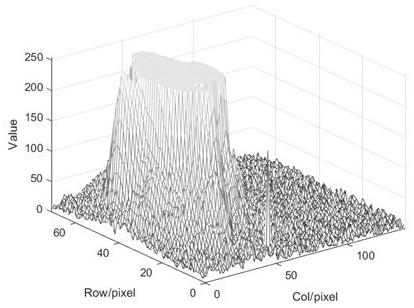
1.一种基于液晶光闭环系统的光斑高精度提取定位方法,其特征在于,包括以下步骤:s1:对ccd采集到的原始衍射光斑图像进行中值滤波处理;s2:对中值滤波处理后的光斑图像通过迭代法进行阈值分割并输出图像;s3:对s2中输出的图像进行开运算操作;s4:对开运算操作后的图像进行横向扫描和纵向扫描,寻找横向和纵向跨度最大的连通区域,即目标光斑所在的区域;s5: 根据s4中得到的目标光斑所在的区域,提取s2中中值滤波后的图像中的目标光斑饱和平面区域的边缘轮廓线,并对提取的边缘轮廓线进行高斯截线拟合,边缘像素点的分布表达式为:;其中:x和y为像素点在图像中所在的横纵坐标,x0和y0为斯曲面的顶点所在的空间位置,δ
x
和δ
y
为高斯曲面函数的方差,a为幅值;将上述表达式作为目标函数进行最小二乘拟合,求出x0和y0,(x0,y0) 即为所求的光斑中心坐标。2.根据权利要求1所述的方法,其特征在于,所述步骤s2中迭代法进行阈值分割具体步骤为:s2.1:选取一个初始阈值t0;s2.2:利用阈值t0把图像分割成两部分,两部分的图像灰度分别为r1和r2;s2.3:计算r1的均值和r2的均值,分别记作μ1和μ2;s2.4:选取一个新的阈值t,且;s2.5:若t与t0差值的绝对值小于预设值,则t为最终阈值,否则令t0=t并重复步骤s2.2-s2.5。3.根据权利要求1所述的方法,其特征在于,所述步骤s4中对图像横向扫描的具体步骤为:s4.1.1:对图像第一行进行扫描,记录该行像素值为1的点的个数,压入栈中;s4.1.2:遍历所有行,对其它行重复步骤s4.1.1中对第一行扫描的步骤;s4.1.3:逐个读出栈中的元素,并记录读出的顺序;s4.1.4:找到能够连续读出非零值最长的序列,该序列的读出顺序对应主光斑的行位置。4.根据权利要求1所述的方法,其特征在于,所述步骤s4中对图像纵向扫描的具体步骤为:s4.2.1:对图像第一列进行扫描,记录该列像素值为1的点的个数,压入栈中;s4.2.2:遍历所有列,对其它行重复步骤s4.2.1中对第一列扫描的步骤;s4.2.3:逐个读出栈中的元素,并记录读出的顺序;s4.2.4:找到能够连续读出非零值最长的序列,该序列的读出顺序对应主光斑的列位置。
5.根据权利要求2所述的方法,其特征在于,所述初始阈值t0为图像中最大的灰度值和最小的灰度值的均值。6.根据权利要求2所述的方法,其特征在于,所述预设值为0.1。7.一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1-6任一项所述方法的步骤。8.一种计算机可读存储介质,用于存储计算机指令,其特征在于,所述计算机指令被处理器执行时实现权利要求1-6任一项所述方法的步骤。
技术总结
本发明涉及一种基于液晶光闭环系统的光斑高精度提取定位方法,包括以下步骤:S1:对采集到的原始衍射光斑图像进行滤波处理;S2:对处理后的光斑图像通过进行阈值分割并输出图像;S3:对S2中输出的图像进行开运算操作;S4:对开运算操作后的图像进行横向扫描和纵向扫描,寻找目标光斑所在的区域;S5:根据S4中得到的目标光斑所在的区域,提取S2中处理后的图像中的目标光斑饱和平面区域的边缘轮廓线,并对提取的边缘轮廓线进行高斯截线拟合,得出边缘像素点的分布表达式,将表达式作为目标函数进行最小二乘拟合,通过计算求出求的光斑中心坐标,本发明与其它几种提取和定位方法相比较,在保证高精度的前提下,有着更快运算速度。有着更快运算速度。有着更快运算速度。
技术研发人员:董科研 宋延嵩 刘超 张博 吴宏凯 梁宗林
受保护的技术使用者:长春理工大学
技术研发日:2022.10.27
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。