1.本发明属于计量测试领域,涉及一种负荷传感器动力学模型参数辨识方法和装置、计算机设备、计算机可读存储介质。
背景技术:
2.航空、航天、船舶、装甲车辆、海洋工程、建筑土木、智能制造等领域大量使用力传感器、扭矩传感器等负荷传感器进行力与扭矩参数的动态测量,为了确保这些负荷传感器量值的准确可靠,需要对这些传感器进行动态校准。作为传感器动态校准的现有技术,cn114485760a公开了一种传感器校准方法,cn108759875a公开了一种基于系统辨识与频响校正的传感器动态补偿方法。但是,现有的动态校准获得的有限性能指标已经不能满足工程现场力与扭矩高精度动态测量的需求,为了满足现场力与扭矩动态测量评价与修正的要求,需要获取负荷传感器的本征的动力学模型参数。
技术实现要素:
3.本发明的目的是提供一种负荷传感器动力学模型参数辨识方法和装置、计算机设备、计算机可读存储介质,能够获取负荷传感器的本征的动力学模型参数。
4.本发明的一个方面提供一种负荷传感器动力学模型参数辨识方法,包括:幅频响应曲线获取步骤:在绝对法正弦力标准装置上使用惯性质量的惯性块或在绝对法正弦扭矩标准装置上使用转动惯量的惯性块,对负荷传感器进行校准,获取负荷传感器的幅频响应曲线,其中,i=1、2、3
…
;固有频率与阻尼比系数获取步骤:对所获取的幅频响应曲线进行加权最小二乘法二次拟合,得到校准状态下的负荷传感器的固有频率与阻尼比系数;固有频率序列与阻尼比系数序列获取步骤:改变校准时所使用的惯性块的惯性质量或转动惯量,重复执行幅频响应曲线获取步骤和固有频率与阻尼比系数获取步骤的操作,直到i≥3,从而获取由3组以上的惯性质量或转动惯量、固有频率与阻尼比系数构成的固有频率序列与阻尼比系数序列;等效惯量与刚度获取步骤:对所述固有频率序列进行最小二乘法线性拟合,得到负荷传感器自身的等效刚度或扭矩刚度k以及负荷传感器自身的等效惯性质量或转动惯量;结构阻尼获取步骤:根据所述固有频率序列、所述阻尼比系数序列以及等效刚度或扭矩刚度k计算得到由惯性质量或转动惯量与阻尼构成的阻尼序列,对所述阻尼序列进行最小二乘法二次拟合,得到负荷传感器自身的结构阻尼。
5.优选地,所述固有频率与阻尼比系数获取步骤包括:对进行差分计算得到;
对进行第一运算转换:,;以为加权系数,进行第一拟合方程的加权最小二乘法拟合,得到第一系数、第二系数、第三系数;计算该校准状态下的负荷传感器的固有频率与阻尼比系数: 。
6.优选地,所述等效惯量与刚度获取步骤包括:对所述固有频率序列进行第二运算转换:或,;进行第二拟合方程的最小二乘法线性拟合,得到斜率与截距;由第二拟合方程的斜率得到负荷传感器自身的等效刚度或扭矩刚度k,由第二拟合方程的截距得到负荷传感器自身的等效惯性质量或转动惯量;;或。
7.优选地,所述结构阻尼获取步骤包括:根据固有频率、阻尼比系数、等效刚度或扭矩刚度k,如下计算阻尼,得到由惯性质量或转动惯量与阻尼构成的阻尼序列:;对所述阻尼序列进行第三运算转换:或,;进行第三拟合方程的最小二乘法二次拟合,得到第四系数、第五系数、第六系数,由第四系数得到负荷传感器自身的结构阻尼。
8.本发明的另一个方面提供一种负荷传感器动力学模型参数辨识装置,包括:幅频响应曲线获取模块:构成为在绝对法正弦力标准装置上使用惯性质量的惯性块或在绝对法正弦扭矩标准装置上使用转动惯量的惯性块,对负荷传感器进行校准,获取负荷传感器的幅频响应曲线,其中,i=1、2、3
…
;固有频率与阻尼比系数获取模块:构成为对所获取的幅频响应曲线进行加权最小二乘法二次拟合,得到校准状态下的负荷传感器的固有频率与阻尼比系数;固有频率序列与阻尼比系数序列获取模块:构成为改变校准时所使用的惯性块的惯性质量或转动惯量,重复执行幅频响应曲线获取模块和固有频率与阻尼比系数获取
模块的操作,直到i≥3,从而获取由3组以上的惯性质量或转动惯量、固有频率与阻尼比系数构成的固有频率序列与阻尼比系数序列;等效惯量与刚度获取模块:构成为对所述固有频率序列进行最小二乘法线性拟合,得到负荷传感器自身的等效刚度或扭矩刚度k以及负荷传感器自身的等效惯性质量或转动惯量;结构阻尼获取模块:构成为根据所述固有频率序列、所述阻尼比系数序列以及等效刚度或扭矩刚度k计算得到由惯性质量或转动惯量与阻尼构成的阻尼序列,对所述阻尼序列进行最小二乘法二次拟合,得到负荷传感器自身的结构阻尼。
9.优选地,所述固有频率与阻尼比系数获取模块进一步构成为:对进行差分计算得到;对进行第一运算转换:,;以为加权系数,进行第一拟合方程的加权最小二乘法拟合,得到第一系数、第二系数、第三系数;计算该校准状态下的负荷传感器的固有频率与阻尼比系数: 。
10.优选地,所述等效惯量与刚度获取模块进一步构成为:对所述固有频率序列进行第二运算转换:或,;进行第二拟合方程的最小二乘法线性拟合,得到斜率与截距;由第二拟合方程的斜率得到负荷传感器自身的等效刚度或扭矩刚度k,由第二拟合方程的截距得到负荷传感器自身的等效惯性质量或转动惯量;;或。
11.优选地,所述结构阻尼获取模块进一步构成为:根据固有频率、阻尼比系数、等效刚度或扭矩刚度k,如下计算阻尼,得到由惯性质量或转动惯量与阻尼构成的阻尼序列:;对所述阻尼序列进行第三运算转换:或,;进行第三拟合方程的最小二乘法二次拟合,得到第
四系数、第五系数、第六系数,由第四系数得到负荷传感器自身的结构阻尼。
12.本发明的又一个方面提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法的步骤。
13.本发明的又一个方面一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现上述的方法的步骤。
14.本发明以上方面的负荷传感器动力学模型参数辨识方法和装置、计算机设备和计算机可读存储介质,能够获取刚度、等效惯性质量或转动惯量、结构阻尼等负荷传感器本征的动力学模型参数,且只需要绝对法标准装置一种校准设备。
附图说明
15.为了更清楚地说明本发明的技术方案,下面将对本发明实施例的描述中所使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图:图1是本发明一种实施方式的负荷传感器动力学模型参数辨识方法的流程图。
16.图2是本发明一种实施方式的多次校准的负荷传感器的幅频响应曲线。
17.图3是本发明一种实施方式的对幅频响应曲线进行加权最小二乘法二次拟合得到的曲线。
18.图4是本发明一种实施方式的对固有频率序列进行最小二乘法线性拟合得到的直线。
19.图5是本发明一种实施方式的对阻尼序列进行最小二乘法二次拟合得到的曲线。
20.图6是本发明一种实施方式的负荷传感器动力学模型参数辨识装置的构成图。
21.图7是本发明一种实施方式的计算机设备的结构图。
具体实施方式
22.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图,对本发明的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.本发明的实施方式提供一种负荷传感器动力学模型参数辨识方法,这里所说的负荷传感器包括力传感器、扭矩传感器等,负荷传感器为力传感器的情况下,动力学模型参数包括等效刚度、惯性质量、结构阻尼等,负荷传感器为扭矩传感器的情况下,动力学模型参数包括扭矩刚度、转动惯量、结构阻尼等。
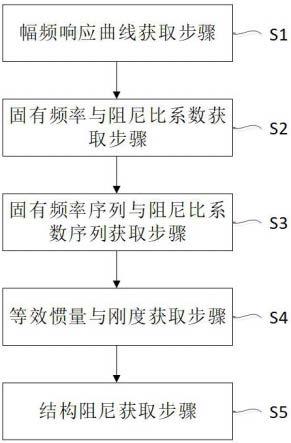
24.图1是本发明一种实施方式的负荷传感器动力学模型参数辨识方法的流程图,如图1所示,本发明实施方式的负荷传感器动力学模型参数辨识方法包括步骤s1-s5。
25.步骤s1为幅频响应曲线获取步骤,在该步骤中,在绝对法正弦力标准装置上使用惯性质量的惯性块或在绝对法正弦扭矩标准装置上使用转动惯量的惯性块,对负荷传感器进行校准,获取负荷传感器的幅频响应曲线,其中,i=1、2、3
…
。
26.其中,绝对法正弦力标准装置是指采用基于激光干涉测量的惯性力溯源方法的正弦力标准装置,在负荷传感器为力传感器的情况下,在绝对法正弦力标准装置上使用惯性质量的惯性块对力传感器进行校准,获取力传感器的幅频响应曲线。
27.绝对法正弦扭矩标准装置是指采用基于激光干涉测量的惯性力矩溯源方法的正弦扭矩标准装置,在负荷传感器为扭矩传感器的情况下,在绝对法正弦扭矩标准装置上使用转动惯量的惯性块对扭矩传感器进行校准,获取扭矩传感器的幅频响应曲线。
28.这里采用绝对法标准装置而不采用比较法标准装置的原因是,比较法标准装置采用的参考传感器、连接工装、固定支架等与被校传感器动力学耦合,从校准结果中辨识出被校力/扭矩传感器自身的模型参数将更为困难。
29.一般的力传感器与扭矩传感器等负荷传感器的动力学模型可简化为单自由度质量弹簧系统,其本征的动力学模型参数包括等效刚度(力传感器)/扭矩刚度(扭矩传感器)k、等效惯性质量/转动惯量与结构阻尼。实际工况下(包括动态校准状态下)的负荷传感器系统会附加额外的质量/转动惯量,校准状态下会使该附加的额外的质量/转动惯量与负荷传感器本征的等效质量/转动惯量成刚性连接,同时实际阻尼与本征的结构阻尼相比也有变化,此时传感器系统对应的传递函数主要参数包括固有频率与阻尼比系数,两种参数之间的关系为下式(1)、(2):或
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)或
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)则:,由传递函数得到其幅频响应函数如下式(3),其中k为传递函数的比例系数:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)在一个实施例中,通过绝对法正弦力标准装置上首先使用质量=2kg的惯性块,对某应变式力传感器进行校准得到其幅频响应曲线。图2是本发明一种实施方式的多次校准的负荷传感器的幅频响应曲线。使用质量=2kg的惯性块进行校准得到的幅频响应曲线是图2中的最右侧的曲线,频率从500hz到1000hz,频率分辨率5hz,共计101个数据点。从图2的幅频响应曲线上可以比较明显地看出,该力传感器在校准工况下的幅频响应曲线比较符合理想的单自由度二阶系统响应,谐振频率约750hz。
30.步骤s2为固有频率与阻尼比系数获取步骤,在该步骤中,对所获取的幅频响应曲线进行加权最小二乘法二次拟合,得到校准状态下的负荷传感器的固有频率与阻尼比系数。
31.优选地,所述固有频率与阻尼比系数获取步骤可以包括以下步骤s11~s14。
32.步骤s11:对进行差分计算得到,作为具体的计算方式,例如使
,其中为幅频响应曲线上第j个数据点对应的频率。
33.步骤s12:对进行第一运算转换:,。
34.步骤s13:以为加权系数,进行第一拟合方程的加权最小二乘法拟合,得到第一系数、第二系数、第三系数。
35.步骤s14:计算该校准状态下的负荷传感器的固有频率与阻尼比系数: 。
36.步骤s14的计算推导过程如下:以为自变量,为因变量,代入前面的幅频响应函数式(3),得到:其中。
37.则得到:在上面的步骤s13中,加权系数的选取,主要考虑拟合的目的是为了获取固有频率与阻尼比,幅频响应曲线上谐振峰位置与谐振峰的陡峭程度是影响结果的主要因素,把设为加权系数将增加谐振峰上数据的权重尤其是谐振峰上升段与下降段的权重。
38.在上述实施例中,对图2所示的最左侧幅频响应曲线进行加权最小二乘法二次拟合的结果如图3所示,其横坐标为,纵坐标为。可见由于加权系数的作用,拟合曲线与原始数据在中间数据段(对应图2的幅频响应曲线中的谐振峰上数据段)吻合比较好。拟合得到的方程参数为=2.36675e-13, =-2.69423e-07, =7.68012e-02。通过拟合参数计算后的固有频率为,阻尼比。
39.步骤s3为固有频率序列与阻尼比系数序列获取步骤,在该步骤中,改变校准时所使用的惯性块的惯性质量或转动惯量,重复执行幅频响应曲线获取步骤和固有频率与阻尼比系数获取步骤的操作,直到i≥3,从而获取由3组以上的惯性质量或转动惯量、固有频率与阻尼比系数构成的固有频率序列与阻尼比系数序列。
40.在上述实施例中,把=2kg依次改为,重复步骤s1与s2,得到5条不同工况下的幅频响应曲线如图2所示,5条幅频响应曲线分别所对应的固有频率序列与阻尼比系数序列如表1所示。
41.表1 不同工况下正弦校准得到的固有频率序列与阻尼比序列序号12345惯性质量/kg23456固有频率/hz754.751623.527543.257487.664446.257阻尼比0.02021470.01683440.01477090.01330580.012217
ꢀꢀꢀꢀ
步骤s4为等效惯量与刚度获取步骤,在该步骤中,对所述固有频率序列进行最小二乘法线性拟合,得到负荷传感器自身的等效刚度或扭矩刚度k以及负荷传感器自身的等效惯性质量或转动惯量。
42.优选地,所述等效惯量与刚度获取步骤包括以下步骤s21~s23。
43.步骤s21:对所述固有频率序列进行第二运算转换:或,。
44.步骤s22:进行第二拟合方程的最小二乘法线性拟合,得到斜率与截距。
45.步骤s23:由第二拟合方程的斜率得到负荷传感器自身的等效刚度或扭矩刚度k,由第二拟合方程的截距得到负荷传感器自身的等效惯性质量或转动惯量;;或。
46.步骤s23的计算推导过程如下:以或为自变量,为因变量,代入前面的关系式(1),得到:或则得到:则得到:或。
47.在上述实施例中,对在固有频率序列与阻尼比系数序列获取步骤s3中多次校准得
到的固有频率序列进行最小二乘法线性拟合得到的直线如图4所示。由此计算得到此力传感器的自身等效刚度k=4.835e 7、等效惯性质量=0.1501kg。由得到没有附加质量的情况下传感器自身的固有频率=2856.6hz,可见附加质量将显著降低传感器的固有频率。
48.步骤s5为结构阻尼获取步骤,在该步骤中,根据所述固有频率序列、所述阻尼比系数序列以及等效刚度或扭矩刚度k计算得到由惯性质量或转动惯量与阻尼构成的阻尼序列,对所述阻尼序列进行最小二乘法二次拟合,得到负荷传感器自身的结构阻尼。
49.优选地,所述结构阻尼获取步骤包括以下步骤s31~s33。
50.步骤s31:根据固有频率、阻尼比系数、等效刚度或扭矩刚度k,如下计算阻尼,得到由惯性质量或转动惯量与阻尼构成的阻尼序列:。
51.步骤s32:对所述阻尼序列进行第三运算转换:或,;步骤s33:进行第三拟合方程的最小二乘法二次拟合,得到第四系数、第五系数、第六系数,由第四系数得到负荷传感器自身的结构阻尼。
52.在上述实施例中,在步骤s31中,5次不同工况下校准对应计算的阻尼分别为412.22 、415.535 、418.473 、419.937、421.35。
53.在步骤s33中,以或为自变量,为应变量,在比较了线性方程、指数方程等不同方程的拟合度后,构建了第三拟合方程,此时本构阻尼。
54.在上述实施例中,对阻尼序列进行最小二乘法二次拟合得到的曲线如图5所示,拟合结果得到的力传感器本征阻尼为。
55.综上所述,本发明实施方式的负荷传感器动力学模型参数辨识方法是一种基于正弦校准的负荷传感器动力学模型参数辨识方法,所述方法通过绝对法正弦力或正弦扭矩标准装置对负荷传感器进行动态校准,获取负荷传感器的幅频响应曲线;对所获取的幅频响应曲线进行加权最小二乘法二次拟合,得到校准状态下的负荷传感器系统的固有频率与阻尼比系数;改变校准时使用的惯性块质量或转动惯量,多次获取校准状态下的负荷传感器系统的固有频率与阻尼比系数;基于所获取的多个校准状态下的固有频率与阻尼比系数,通过线性拟合得到负荷传感器自身的等效惯性质量或转动惯量以及传感器自身的等效刚度或扭矩刚度;基于多个校准状态下通过换算得到的阻尼,通过二次拟合得到传感器自身的结构阻尼。
56.由此,本发明实施方式提供的基于正弦校准的负荷传感器动力学模型参数辨识方法具有如下有益效果:1、本发明实施方式通过对负荷传感器(力传感器或扭矩传感器)在不同工况下的多次绝对法正弦校准,不仅能获取到当时工况下传感器系统的动态测量参数化数学模型
(传递函数)的相关参数,还能获取到负荷传感器本征的动态测量物理模型参数(动力学模型参数,包括刚度、等效惯量、结构阻尼等),从而能够反映负荷传感器更加真实与基础的特性信息,有助于负荷传感器在工程动态测量中的误差评价与修正。
57.2、本发明实施方式所采用的校准设备只需要绝对法正弦力或正弦扭矩标准装置一种校准设备,避免使用多套设备对各主要参数分别进行测量,简化了试验系统与程序,提高了实用能力。
58.本发明的实施方式还提供一种负荷传感器动力学模型参数辨识装置。图6是本发明一种实施方式的负荷传感器动力学模型参数辨识装置的构成图。如图6所示,本实施方式的负荷传感器动力学模型参数辨识装置包括:幅频响应曲线获取模块101:构成为在绝对法正弦力标准装置上使用惯性质量的惯性块或在绝对法正弦扭矩标准装置上使用转动惯量的惯性块,对负荷传感器进行校准,获取负荷传感器的幅频响应曲线,其中,i=1、2、3
…
;固有频率与阻尼比系数获取模块102:构成为对所获取的幅频响应曲线进行加权最小二乘法二次拟合,得到校准状态下的负荷传感器的固有频率与阻尼比系数;固有频率序列与阻尼比系数序列获取模块103:构成为改变校准时所使用的惯性块的惯性质量或转动惯量,重复执行幅频响应曲线获取模块101和固有频率与阻尼比系数获取模块102的操作,直到i≥3,从而获取由3组以上的惯性质量或转动惯量、固有频率与阻尼比系数构成的固有频率序列与阻尼比系数序列;等效惯量与刚度获取模块104:构成为对所述固有频率序列进行最小二乘法线性拟合,得到负荷传感器自身的等效刚度或扭矩刚度k以及负荷传感器自身的等效惯性质量或转动惯量;结构阻尼获取模块105:构成为根据所述固有频率序列、所述阻尼比系数序列以及等效刚度或扭矩刚度k计算得到由惯性质量或转动惯量与阻尼构成的阻尼序列,对所述阻尼序列进行最小二乘法二次拟合,得到负荷传感器自身的结构阻尼。
59.优选地,所述固有频率与阻尼比系数获取模块102进一步构成为:对进行差分计算得到;对进行第一运算转换:,;以为加权系数,进行第一拟合方程的加权最小二乘法拟合,得到第一系数、第二系数、第三系数;计算该校准状态下的负荷传感器的固有频率与阻尼比系数: 。
60.优选地,所述等效惯量与刚度获取模块104进一步构成为:
对所述固有频率序列进行第二运算转换:或,;进行第二拟合方程的最小二乘法线性拟合,得到斜率与截距;由第二拟合方程的斜率得到负荷传感器自身的等效刚度或扭矩刚度k,由第二拟合方程的截距得到负荷传感器自身的等效惯性质量或转动惯量;;或。
61.优选地,所述结构阻尼获取模块105进一步构成为:根据固有频率、阻尼比系数、等效刚度或扭矩刚度k,如下计算阻尼,得到由惯性质量或转动惯量与阻尼构成的阻尼序列:;对所述阻尼序列进行第三运算转换:或,;进行第三拟合方程的最小二乘法二次拟合,得到第四系数、第五系数、第六系数,由第四系数得到负荷传感器自身的结构阻尼。
62.本实施方式的负荷传感器动力学模型参数辨识装置的具体实施例可以参见上文中对于负荷传感器动力学模型参数辨识方法的限定,在此不再赘述。上述负荷传感器动力学模型参数辨识装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
63.本发明的实施方式还提供一种计算机设备,该计算机设备可以是服务器,其内部结构图可以如图7所示。该计算机设备包括通过系统总线连接的处理器、存储器和网络接口。其中,该计算机设备的处理器用于提供计算和控制能力。该计算机设备的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统、计算机程序和数据库。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的数据库用于存储各个框架的运行参数数据。该计算机设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现本实施方式的负荷传感器动力学模型参数辨识方法的步骤。
64.本领域技术人员可以理解,图7中示出的结构,仅仅是与本技术方案相关的部分结构的框图,并不构成对本技术方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
65.本发明的实施方式还提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现本发明实施方式的负荷传感器动力学模型参数辨识方法的步骤。
66.以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领
域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。