1.本发明属于三维模型构建技术领域,具体涉及一种基于web端的坡道路线的快速规划方法。
背景技术:
2.大坝的填筑施工过程中,“之”字型坡道的规划,是施工前重要的准备工作,其规划的合理与否,直接关乎大坝施工过程中物料运输的安全性和便捷性以及该坡道本身的施工工程量。因此如何科学合理快速规划该路线,使得坡道纵向坡度在满足运输车辆安全上坝要求的前提下,最大程度减少该坡道长度,又能直观形象展示规划路线和施工方案,就显得尤为重要。
3.现有情况上坝“之”字型坡道的规划,主要依靠cad等其他二维绘图工具,其中通过绘制平面布置图进行上坝“之”字型坡道的平面设计,通过绘制坡道剖面图进行上坝“之”字型坡道的纵坡设计,然后结合上述成果进行比对试算,一般需要多次调整后才能确定最终坡道规划设计方案,操作流程复杂,且设计过程易出错,对设计人员的能力素质要求较高。
技术实现要素:
4.本发明的目的在于提供一种基于web端的坡道路线的快速规划方法,与现有的二维坡道路线规划方法相比,采用半自动化的几何建模的方式,提高了坡道的规划效率,且坡道规划结果直观形象。
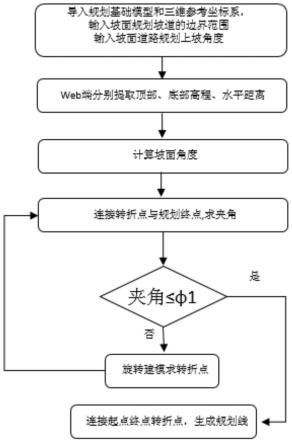
5.本发明所采用的技术方案是:基于web端的坡道路线的快速规划方法,包括以下步骤:
6.步骤1、在web端导入规划基础模型γ和三维参考坐标系,输入坡面规划坡道的边界范围π;
7.步骤2、提取步骤1边界范围π的坡面顶部高程h1和底部高程h2,获得坡面上下边界高差δh=h
1-h2;
8.步骤3、做步骤1边界范围π的水平投影π1,提取水平投影π1上下边界水平距离l,根据水平距离l和步骤2中的高差δh,计算得出规划范围坡面坡度
9.步骤4、在步骤1的边界范围π上,分别指定坡道规划起点a和坡道规划终点b,并提取步骤1中边界范围π所在的平面β;
10.步骤5、输入规划坡道的纵坡角度使其满足
11.步骤6、连接坡道规划起点a和坡道规划终点b,获取连接线ab与水平面xoy的夹角判断夹角与步骤5中纵坡角度的大小,当的大小,当时进入步骤8;当时,以坡道规划起点a建模与平面β求相交线,在相交线选取转折点an`,令旋转基点an=转折点an`,进入步骤7;
12.步骤7、连接旋转基点an和坡道规划终点b,获取连接线anb与水平面xoy的夹角
判断夹角与步骤5中纵坡角度的大小,当时进入步骤8;当时,以旋转基点an建模与平面β求相交线,在相交线上取转折点an``,令旋转基点an=转折点an``,重复步骤7;
13.步骤8、连接坡道规划起点a、转折点和坡道规划终点b生成坡道规划路线。
14.本发明的特点还在于,
15.步骤6中当时:
16.当过步骤4中规划起点a的选取位置,在坡道规划范围下边界上时,过步骤4中坡道规划起点a做平行于z轴的直线z1,过坡道规划起点a点做一条与水平面xoy呈夹角的直线l1,使直线l1绕直线z1旋转,生成锥面体λ1,锥面体λ1与步骤4中的平面β存在两条相交线l1和l2,相交线l1和l2中至少存在一个相交线与边界范围π有交点,即:当坡道规划起点a的选取位置在坡道规划范围下边界的两侧角点上时,相交线l1相交边界范围π于转折点a1,则线段aa1为坡道规划路线的起始段;当坡道规划起点a的选取位置在坡道规划范围下边界除角点位置外的中部位置上时,两条相交线l1和l2分别与边界范围π的存在交点a1、b1,则线段aa1、ab1分别为两种坡道规划路线的起始段,选取aa1或ab1进行坡道路线的后续规划。
17.步骤6中线段aa1、ab1的位置计算方法具体为:
18.在直线l1上取任意点d,其在水平面xoy上的为投影点c,过点d做垂线交z1于点e;设坡道规划起点a坐标(x0,y0,z0),ac长度为m;设β的平面的法向量为(a,b,c),且平面β过起点a(x0,y0,z0),那么β的点法式平面方程为:
19.a(x-x0) b(y-y0) c(z-z0)=0
20.直线l1绕直线z1旋转生成以直线l1为母线,以
⊙
e为准线的圆锥面,其中以
⊙
e为准线的曲线方程为:
21.(x
1-x0)
2
(y
1-y0)2=m2;
[0022][0023]
则通过顶点点a(x0,y0,z0)和准线
⊙
e上的一点(x1,y1,z1)的母线方程为:
[0024][0025]
令上式比值等于1/t(t≠0),得:
[0026]
x1=x0 (x-x0)t
[0027]
y1=y0 (y-y0)t
[0028]
z1=z0 (z-z0)t
[0029]
带入
⊙
e准线方程,消去t,即得锥面的普通方程:
[0030][0031]
与β的平面方程a(x-x0) b(y-y0) c(z-z0)=0联立,即获得代表两条直线的方程:
[0032][0033]
利用上述直线方程与步骤1中的边界范围π求交点,即获得转折点a1、b1,分别连接aa1、ab1线段即得。
[0034]
步骤7中当时,令步骤6中的旋转基点an=转折点an`,过旋转基点an做平行于z轴的直线zn,过旋转基点an做一条与水平面xoy呈夹角的直线ln,使直线ln绕直线zn旋转,生成锥面体λn,锥面体λn与步骤4中的平面β存在一条相交线ln,相交线ln交边界范围π于转折点an``。
[0035]
步骤8具体为:
[0036]
当步骤6中的时,连接坡道规划起点a和坡道规划终点b生成坡道规划路线ab;
[0037]
当步骤7中的时,连接坡道规划起点a、转折点an`和坡道规划终点b生成坡道规划路线aan`b;
[0038]
当步骤7中的时,连接坡道规划起点a、转折点an`、转折点an``和坡道规划终点b生成坡道规划路线aan`an``b。
[0039]
本发明的有益效果是:本发明的基于web端的坡道路线的快速规划方法,将原有坡道规划的方法通过构建三维空间几何模型的方式直接具象化,将坡道规划中设计要素转变为程序的输入变量,在预设的符合坡道规划设计的算法下,消除了原有坡道规划设计过程中,需要结合多张二维设计图进行比对的设计过程,设计规划成果相比原有方式准确高效,实现了高效直观进行坡道规划方案设计的目的。
附图说明
[0040]
图1是本发明的基于web端的坡道路线的快速规划方法的流程图;
[0041]
图2是本发明的基于web端的坡道路线的快速规划方法中边界范围π的特点的示意图;
[0042]
图3是本发明的基于web端的坡道路线的快速规划方法中坡道规划路线的示意图;
[0043]
图4是本发明的基于web端的坡道路线的快速规划方法中边界范围π的平面示意图;
[0044]
图5是本发明的基于web端的坡道路线的快速规划方法中步骤6的示意图;
[0045]
图6是本发明的基于web端的坡道路线的快速规划方法中步骤7的示意图。
具体实施方式
[0046]
下面结合附图以及具体实施方式对本发明进行详细说明。
[0047]
本发明提供了一种基于web端的坡道路线的快速规划方法,如图1所示,具体按照以下步骤实施:
[0048]
步骤1、在web端导入规划基础模型γ和三维参考坐标系。输入坡面规划坡道的边界范围π,如图2所示,该边界范围可为不规则的平面图形,与此同时输入边界范围π的目的是在变坡度坡面上进行局部或整体坡面范围的路线规划。
[0049]
步骤2、如图3所示,提取步骤1边界范围的坡面顶部高程h1和边界范围的底部高程h2,上述作为输入条件,可获得坡面上下边界高差δh=h
1-h2。在web端以步骤1导入的三维参考坐标系为参考,可自动提取边界范围π的坡面顶部高程h1和底部高程h2,运算其高差δh。
[0050]
步骤3、如图4所示,做步骤1边界范围π的水平投影π1,提取水平投影π1上下边界水
平距离l。根据水平距离l和步骤2中的高差δh,可计算得出规划范围坡面坡度
[0051]
步骤4、在步骤1的边界范围π上,分别指定坡道规划起点a、和坡道规划终点b。提取步骤1中的边界范围π所在的平面β。坡道规划起点a和坡道规划终点b,可直接在三维指定点位,也可通过先在步骤3中边界范围π的水平投影π1上指定坡道规划起点a和坡道规划终点b的投影点来获取,后者可方便设计人员,在二维图纸上做前期规划。另外提取步骤1中边界范围π所在的平面β,是后续通过几何建模的方式寻找规划路线的基础。
[0052]
步骤5、根据施工道路规范要求及运输车辆载重下的行驶条件等,输入规划坡道的纵坡角度当满足即表示需要做“之”字形坡道规划。(当满足即代表车辆可沿ab路线直接上坡,连接ab点即可获得坡道路线)。
[0053]
步骤6、连接坡道规划起点a和坡道规划终点b,获取连接线ab与水平面xoy的夹角判断夹角与步骤5中纵坡角度的大小,当的大小,当时进入步骤8,即直接连接坡道规划起点a和坡道规划终点b生成坡道规划路线ab;当时,过步骤4中坡道规划起点a做平行于z轴的直线z1,过坡道规划起点a点做一条与水平面xoy呈夹角的直线l1(即保证规划坡道的纵坡角度一直满足规划需求),如图5所示。使直线l1绕直线z1旋转,生成锥面体λ1,锥面体λ1将与步骤4中的平面β存在两条相交线l1和l2。相交线l1和l2分别交边界范围π于转折点a1、b1。线段aa1,ab1即分别为两种坡道规划路线的起始段,其中以求相交线段aa1,ab1为例:
[0054]
在直线l1上取任意点d,其在水平面xoy上的为投影点c,过点d做垂线交z1于点e。
[0055]
设坡道规划起点a坐标(x0,y0,z0),ac长度为m
[0056]
设β的平面的法向量为(a,b,c),且平面β过起点a(x0,y0,z0):
[0057]
那么β的点法式平面方程为:
[0058]
a(x-x0) b(y-y0) c(z-z0)=0
[0059]
直线l1绕直线z1旋转生成以直线l1为母线,以
⊙
e为准线的圆锥面,
[0060]
其中以
⊙
e为准线的曲线方程为:(x
1-x0)
2
(y
1-y0)2=m2;
[0061]
则通过顶点点a(x0,y0,z0),和准线
⊙
e上的一点(x1,y1,z1)
[0062]
的母线方程为:
[0063][0064]
令上式比值等于1/t(t≠0),
[0065]
得x1=x0 (x-x0)t,y1=y0 (y-y0)t,z1=z0 (z-z0)t
[0066]
带入
⊙
e准线方程,消去t,即得锥面的普通方程:
[0067][0068]
与β的平面方程:a(x-x0) b(y-y0) c(z-z0)=0联立:即获得代表两条直线的方程:
[0069]
[0070]
利用上述直线方程与步骤1中的边界范围π求交点,即获得转折点a1,b1,分别连接aa1,ab1线段即为所求。
[0071]
选择两种坡道规划路线其中之一进行下一步,以选线段aa1为坡道规划路线的起始段为例。
[0072]
步骤7、连接转折点a1,坡道规划终点b。获取连接线a1b与水平面xoy的夹角判断夹角与步骤5中纵坡角度的大小,当时进入步骤8;当此时点a1即为旋转基点,过点a1做一条平行于z轴的直线z2,过a1做一条与水平面xoy呈夹角的直线l2,使直线l2绕直线z2旋转,生成锥面体λ2,锥面体λ2将与步骤4中的平面β存在至少一条相交线l3。相交线l3交边界范围π于转折点a2。线段a1a2即为以aa1作为坡道规划起始段方案的第二段。
[0073]
如图6所示,其中aa1的获取原理和相交线段aa1、ab1获取方式同理。随即连接转折点a2、坡道规划终点b,获取连接线a2b与水平面xoy的夹角判断夹角与步骤5中纵坡角度的大小,重复本步的判断条件,依次类推,生成n个转折点an``。就以生成三个转折点为例,过旋转基点a2做平行于z轴的直线z3,过旋转基点a2做一条与水平面xoy呈夹角的直线l3,使直线l3绕直线z3旋转,生成锥面体λ3,锥面体λ3与步骤4中的平面β存在一条相交线l4,相交线l4交边界范围π于转折点a3。连接转折点a3,坡道规划终点b。获取连接线a3b与水平面xoy的夹角判断得到夹角小于步骤5中纵坡角度此时进入步骤8;
[0074]
步骤8、连接坡道规划起点a、转折点a1、a2、a3和坡道规划终点b生成坡道规划路线aa1a2a3b;同理获得以ab1作为坡道规划起始段的坡道规划路线方案。结合现场施工需求可对坡道规划路线方案进行二选一。
[0075]
通过上述方式,本发明的基于web端的坡道路线的快速规划方法,将原有坡道规划的方法通过构建三维空间几何模型的方式直接具象化,将坡道规划中设计要素转变为程序的输入变量,在预设的符合坡道规划设计的算法下,消除了原有坡道规划设计过程中,需要结合多张二维设计图进行比对的设计过程,设计规划成果相比原有方式准确高效,实现了高效直观进行坡道规划方案设计的目的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。