技术特征:
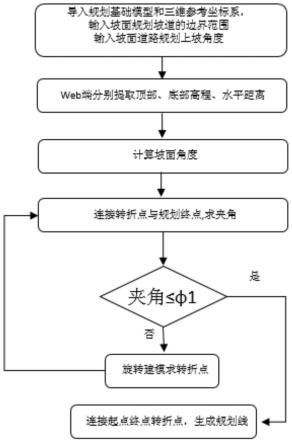
1.基于web端的坡道路线的快速规划方法,其特征在于,包括以下步骤:步骤1、在web端导入规划基础模型γ和三维参考坐标系,输入坡面规划坡道的边界范围π;步骤2、提取步骤1边界范围π的坡面顶部高程h1和底部高程h2,获得坡面上下边界高差δh=h
1-h2;步骤3、做步骤1边界范围π的水平投影π1,提取水平投影π1上下边界水平距离l,根据水平距离l和步骤2中的高差δh,计算得出规划范围坡面坡度步骤4、在步骤1的边界范围π上,分别指定坡道规划起点a和坡道规划终点b,并提取步骤1中边界范围π所在的平面β;步骤5、输入规划坡道的纵坡角度使其满足步骤6、连接坡道规划起点a和坡道规划终点b,获取连接线ab与水平面xoy的夹角判断夹角与步骤5中纵坡角度的大小,当的大小,当时进入步骤8;当时,以坡道规划起点a建模与平面β求相交线,在相交线选取转折点a
n
`,令旋转基点a
n
=转折点a
n
`,进入步骤7;步骤7、连接旋转基点a
n
和坡道规划终点b,获取连接线a
n
b与水平面xoy的夹角判断夹角与步骤5中纵坡角度的大小,当时进入步骤8;当时,以旋转基点a
n
建模与平面β求相交线,在相交线上取转折点a
n
``,令旋转基点a
n
=转折点a
n
``,重复步骤7;步骤8、连接坡道规划起点a、转折点和坡道规划终点b生成坡道规划路线。2.如权利要求1所述的基于web端的坡道路线的快速规划方法,其特征在于,所述步骤6中当时:当过步骤4中规划起点a的选取位置,在坡道规划范围下边界上时,过步骤4中坡道规划起点a做平行于z轴的直线z1,过坡道规划起点a点做一条与水平面xoy呈夹角的直线l1,使直线l1绕直线z1旋转,生成锥面体λ1,锥面体λ1与步骤4中的平面β存在两条相交线l1和l2,相交线l1和l2中至少存在一个相交线与边界范围π有交点,即:当坡道规划起点a的选取位置在坡道规划范围下边界的两侧角点上时,相交线l1相交边界范围π于转折点a1,则线段aa1为坡道规划路线的起始段;当坡道规划起点a的选取位置在坡道规划范围下边界除角点位置外的中部位置上时,两条相交线l1和l2分别与边界范围π的存在交点a1、b1,则线段aa1、ab1分别为两种坡道规划路线的起始段,选取aa1或ab1进行坡道路线的后续规划。3.如权利要求2所述的基于web端的坡道路线的快速规划方法,其特征在于,所述步骤6中线段aa1、ab1的位置计算方法具体为:在直线l1上取任意点d,其在水平面xoy上的为投影点c,过点d做垂线交z1于点e;设坡道规划起点a坐标(x0,y0,z0),ac长度为m;设β的平面的法向量为(a,b,c),且平面β过起点a(x0,y0,z0),那么β的点法式平面方程为:a(x-x0) b(y-y0) c(z-z0)=0直线l1绕直线z1旋转生成以直线l1为母线,以
⊙
e为准线的圆锥面,其中以
⊙
e为准线的曲线方程为:
(x
1-x0)
2
(y
1-y0)2=m2;则通过顶点点a(x0,y0,z0)和准线
⊙
e上的一点(x1,y1,z1)的母线方程为:令上式比值等于1/t(t≠0),得:x1=x0 (x-x0)ty1=y0 (y-y0)tz1=z0 (z-z0)t带入
⊙
e准线方程,消去t,即得锥面的普通方程:与β的平面方程a(x-x0) b(y-y0) c(z-z0)=0联立,即获得代表两条直线的方程:利用上述直线方程与步骤1中的边界范围π求交点,即获得转折点a1、b1,分别连接aa1、ab1线段即得。4.如权利要求1所述的基于web端的坡道路线的快速规划方法,其特征在于,所述步骤7中当时,令步骤6中的旋转基点a
n
=转折点a
n
`,过旋转基点a
n
做平行于z轴的直线z
n
,过旋转基点a
n
做一条与水平面xoy呈夹角的直线l
n
,使直线l
n
绕直线z
n
旋转,生成锥面体λ
n
,锥面体λ
n
与步骤4中的平面β存在一条相交线l
n
,相交线l
n
交边界范围π于转折点a
n
``。5.如权利要求1所述的基于web端的坡道路线的快速规划方法,其特征在于,所述步骤8具体为:当步骤6中的时,连接坡道规划起点a和坡道规划终点b生成坡道规划路线ab;当步骤7中的时,连接坡道规划起点a、转折点a
n
`和坡道规划终点b生成坡道规划路线aa
n
`b;当步骤7中的时,连接坡道规划起点a、转折点a
n
`、转折点a
n
``和坡道规划终点b生成坡道规划路线aa
n
`a
n
``b。
技术总结
本发明公开的本发明的基于web端的坡道路线的快速规划方法,将原有坡道规划的方法通过构建三维空间几何模型的方式直接具象化,将坡道规划中设计要素转变为程序的输入变量,在预设的符合坡道规划设计的算法下,消除了原有坡道规划设计过程中,需要结合多张二维设计图进行比对的设计过程,设计规划成果相比原有方式准确高效,实现了高效直观进行坡道规划方案设计的目的。计的目的。计的目的。
技术研发人员:孙龙田 黄晋 李建东 栗煜 史姣 史命 李相臣 穆台力甫 牙森 钱国文 昌新华 牛书宇
受保护的技术使用者:中国葛洲坝集团股份有限公司
技术研发日:2022.08.23
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。