1.本发明属于智能制造技术领域,涉及一种智能制造平台。
背景技术:
2.智能制造是基于新一代信息通信技术与先进制造技术深度融合,贯穿于设计、生产、管理和服务等智能制造活动的各个环节,具有自感知、自学习、自决策、自执行和自适应等功能的新型生产方式。现代的制造系统已经不再是单纯地追求某个自动化设备,而是更加强调设备间的联动,将制造系统的设备通过各种网络通信连接到一起,在提高自动化程度和高效生产的同时使其更加智能化。同时,5g具有媲美光纤的传输速度、万物互联的泛在连接和接近工业总线的实时能力。因此,基于5g技术优势,提出一种基于5g的智能制造平台,用以解决工业制造信息化水平低、生产效率低的问题。
技术实现要素:
3.本发明的目的在于提供一种智能制造平台,以解决上述背景技术中提出的问题。
4.本发明的目的可通过下列技术方案来实现:一种智能制造平台,所述智能制造平台包括仓储系统、物料配送agv、智能制造输送线、中控台和包装工位,所述智能制造输送线由输送线、六轴机器人、四轴机器人和视觉识别模组组成,所述输送线包括第一工位、第二工位和第三工位。
5.与现有技术相比,本发明一种智能制造平台的优点为:采用5g技术,通过工业以太网完成对数据的快速交换和流程控制,利用mes采集所有设备的运行信息和工作状态,对工艺过程实时调配,实现系统的仓储取料、检测识别、自动装配、分拣入位等生产工艺环节的智能控制,从而实现制造过程的信息化和数字化,有效提升生产效率和生产精度,具有数字化、智能化程度高的优点,装配的产品生产精度高、生产效率快,并且可实时监测产品状态、管理产品信息。
附图说明
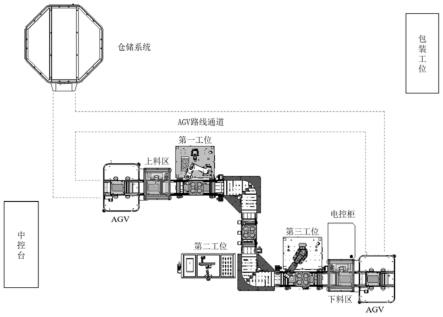
6.图1是本发明一种智能制造平台结构布局示意图。
7.图2是本发明一种智能制造平台的框架结构示意图。
8.图3是本发明一种智能制造平台生产流程示意图。
具体实施方式
9.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
10.如图1、图2和图3所示,本发明一种智能制造平台,智能制造平台包括仓储系统、物料配送agv、智能制造输送线、中控台和包装工位,智能制造输送线由输送线、六轴机器人、四轴机器人和视觉识别模组组成,输送线包括第一工位、第二工位和第三工位。
11.其中:仓储系统用于存储物料,并记录和管理物料、使用人员信息等;物料配送agv用于仓储系统与输送线间配送物料,运输产品;智能制造输送线由输送线、六轴机器人、四轴机器人、视觉识别系统等组成;输送线共分有3个工位,第一工位为点胶装配工位,第二工位为人工装配工位,第三工位为检测工位;中控台用于安排订单,监控各子系统的生产信息和任务状态。
12.托盘存储于仓储系统中,物料配送agv与仓储系统对接,从仓储系统中搬运托盘至智能制造输送线,物料配送agv通过读写器将托盘的数据信息存入rf标签中,数据传输至mes中。
13.mes给自动化产线派送任务。
14.物料配送agv运送托盘至智能制造输送线,托盘随产线运动,至第一工位处,接近开关感应到托盘,顶升机构顶起托盘,机器人吸取物料a放至托盘,机器人进行点胶操作,随即利用视觉识别系统检测物料b的位置,并反馈信号给其协作的机器人,机器人前往追踪物料并抓取物料b,安装于点胶处。完成后,顶升机构下降,挡停机构放行。
15.托盘随产线运动至第二工位,接近开关感应到托盘,顶升机构顶起托盘,mes系统给第二工位派单,物料c亮灯,人工拿取待装配件和物料c,执行装配操作,完成后再放至原处,放行该托盘。
16.托盘随产线运动至第三工位,接近开关感应到托盘,顶升机构顶起托盘,六轴机器人携带相机运动至物料上方,拍摄照片并传输至视觉服务器,视觉检测系统反馈信号给机器人,若装配正确,产线放行;若装配ng,机器人夹取工件至废料区。
17.托盘运行至下料区,mes给agv派送任务。agv运行至下料处,与皮带线对接,将装配完成的物料运送至人工包装区,并将空托盘运送至仓储。仓储皮带线前端设置读写器,读取托盘的rf信息,并将信息存储于仓储的wms系统中。
18.作为补充,如图2所示,mes系统作为执行层的管理系统,连接wms、fms、ads系统,wms为仓储管理系统,fms为制造线管理系统,ads为agv管理系统,其软件部分通过上位机开发,并结合服务器、数据库等共同实现制造系统的计划排产、实时追踪、调度安排、数据采集和分析等功能,plc作为控制层的主控单元,根据生产、存储、控制等方面的需求,采用tcp/ip协议实现与设备间的通信,直接或间接地采集数据,从而实现对设备的控制功能。实施层由各种自动化设备组成,根据生产需求将设备相连,各设备间相互协作共同完成系统的加工任务。
19.本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
技术特征:
1.一种智能制造平台,其特征在于,所述智能制造平台包括仓储系统、物料配送agv、智能制造输送线、中控台和包装工位,所述智能制造输送线由输送线、六轴机器人、四轴机器人和视觉识别模组组成,所述输送线包括第一工位、第二工位和第三工位;其工作步骤如下:托盘存储于仓储系统中,物料配送agv与仓储系统对接,从仓储系统中搬运托盘至智能制造输送线,物料配送agv通过读写器将托盘的数据信息存入rf标签中,数据传输至mes中;mes给自动化产线派送任务;物料配送agv运送托盘至智能制造输送线,托盘随产线运动,至第一工位处,接近开关感应到托盘,顶升机构顶起托盘,机器人吸取物料a放至托盘,机器人进行点胶操作,随即利用视觉识别系统检测物料b的位置,并反馈信号给其协作的机器人,机器人前往追踪物料并抓取物料b,安装于点胶处;完成后,顶升机构下降,挡停机构放行;托盘随产线运动至第二工位,接近开关感应到托盘,顶升机构顶起托盘,mes系统给第二工位派单,物料c亮灯,人工拿取待装配件和物料c,执行装配操作,完成后再放至原处,放行该托盘;托盘随产线运动至第三工位,接近开关感应到托盘,顶升机构顶起托盘,六轴机器人携带相机运动至物料上方,拍摄照片并传输至视觉服务器,视觉检测系统反馈信号给机器人,若装配正确,产线放行;若装配ng,机器人夹取工件至废料区;托盘运行至下料区,mes给agv派送任务;agv运行至下料处,与皮带线对接,将装配完成的物料运送至人工包装区,并将空托盘运送至仓储;仓储皮带线前端设置读写器,读取托盘的rf信息,并将信息存储于仓储的wms系统中。
技术总结
本发明提供了一种智能制造平台,智能制造平台包括仓储系统、物料配送AGV、智能制造输送线、中控台和包装工位,智能制造输送线由输送线、六轴机器人、四轴机器人和视觉识别模组组成,输送线包括第一工位、第二工位和第三工位。本发明采用5G技术,通过工业以太网完成对数据的快速交换和流程控制,利用MES采集所有设备的运行信息和工作状态,对工艺过程实时调配,实现系统的仓储取料、检测识别、自动装配、分拣入位等生产工艺环节的智能控制,从而实现制造过程的信息化和数字化,有效提升生产效率和生产精度,具有数字化、智能化程度高的优点,装配的产品生产精度高、生产效率快,并且可实时监测产品状态、管理产品信息。管理产品信息。管理产品信息。
技术研发人员:张颖 楼佩煌 宋允辉 宋凯 马春光
受保护的技术使用者:南京航空航天大学苏州研究院
技术研发日:2022.07.23
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。