1.本发明属于大气污染监测技术领域,涉及一种用臭氧雷达探测大气边界层的方法。
背景技术:
2.近年来,臭氧污染逐步成为环境污染的主要参考因素,当其浓度超过一定限值后,会刺激人的呼吸系统,破坏中枢神经,严重影响人们的正常生产与生活。大气边界层高度是逆温层的一个主要参考指标,而逆温层则直接影响了城市臭氧污染的扩散。
3.公布号为cn103135113a的中国发明申请,公开了一种测量大气边界层高度的方法。该方法采用基于重力波理论的算法——重力波梯度法获取边界层高度,直接将气溶胶在重力波作用下的垂直分布引入到算法理论中。
4.公布号为cn112146623a的中国发明申请,公开了一种大气边界层顶高度估算方法,利用探空资料统计某区域逆温层的季节分布特征;在近地面逆温占主导地位的季节,统计近地面逆温顶部所在高度的数分布特征,取其上四分之一位数作为该季节的数阈值;在对流层低层逆温占主导地位的季节,统计对流层低层逆温底部所在高度的数分布特征,取其下四分之一位数作为该季节的数阈值。
5.公布号为cn114282170a的中国发明申请,公开了一种准确计算大气边界层高度的方法,首先通过三次样条差值法,把探空资料的原始数据转换成垂直分辨率为10m的m行
×
12列的数据,从转化后的数据文件中读取温度值、海拔高度值和气压值;然后计算绝对温度和位温值;再计算两层位温差,计算时设定从距地面600m以上开始,最早出现该层位温与100m以下层的位温差超过0.3℃,同时设定该层以上100m处位温与该层位温差超过0.3℃,表明该层所在高度为大气稳定出现逆温层的高度,则将该层底部以下范围确定为边界层高度。
6.公布号为cn110058258a的中国发明申请,公开了一种基于混合型激光雷达的大气边界层探测方法。其基本原理为:利用一台混合型激光雷达,集成直接探测气溶胶激光雷达系统和相干测风激光雷达系统,同时探测气溶胶光学特性和湍流强度的垂直廓线,分别反演出大气边界层高度,利用两者差值与选定阈值的比较,判定出不同类型的大气边界层。
7.上述现有技术在探测大气边界层时,都需要专门的设备。如果在臭氧雷达探测臭氧时空分布的同时,利用臭氧雷达探测出边界层高度,一方面可以使臭氧雷达一物多用、降低城市污染监测治理成本;另一方面可以将臭氧污染分布与边界层高度快速结合,为分析城市臭氧污染的扩散特性,预测未来时间内臭氧的变化趋势提供数据参考。
技术实现要素:
8.本发明的目的是提供一种用臭氧雷达探测大气边界层的方法,在臭氧雷达探测臭氧时空分布的同时,利用臭氧雷达探测出边界层高度,实现臭氧雷达一物多用,降低城市污染监测治理成本;同时将臭氧污染分布与边界层高度快速结合,为分析城市臭氧污染的扩
散特性,预测未来时间内臭氧的变化趋势提供数据参考。本发明的目的通过以下技术方案实现。
9.一种用臭氧雷达探测大气边界层的方法,其特征在于,包括以下步骤:
10.s1臭氧雷达产生三组不同波长的激光信号发射到大气中,这三组激光信号在大气中受到气溶胶的反射产生回波信号,计算机采集回波信号。
11.s2选择计算机所采集的回波信号中的一组,记作a。所选择的回波信号具备高度特性,若高度分辨率为30米,监测总高度为30千米,则共计有1000个信号梯度点。
12.s3根据经验一定高度以上为洁净的大气层,这个范围内的回波信号基本是由大气分子所产生,故将其作为背景噪声,记作am,将信号a依次减去am去除背景噪声,获得去噪后的信号数据。
13.s4使用fernald反演算法对去除噪声后的信号数据进行处理,计算出大气气溶胶消光系数,记作e。
14.s5根据气溶胶消光系数e在大气边界层位置附近有突变的特性,使用小波协方差函数计算出大气边界层高度h。
15.上述方法中,步骤s1同时是臭氧雷达探测臭氧时空分布的步骤,臭氧雷达探测臭氧时空分布的过程为:通过高能紫外激光器发射多组波长接近的脉冲激光,激光经过扩束器发射到大气中与臭氧、气溶胶等发生相互作用,后向散射光被望远镜接收,得到各波长的回波信号,由差分吸收激光雷达算法反演出大气中臭氧的浓度。
16.进一步地,步骤s2选择三组激光信号中波长最长的那一组的回波信号。
17.进一步地,步骤s3所述的一定高度为25千米。
18.进一步地,步骤s4所述fernald反演算法的计算公式如下:
[0019][0020]
式中:
[0021]
αa(r)为r处气溶胶消光系数,无因次;
[0022]
αm(r)为r处大气分子消光系数,无因次,根据标准大气分子模型确定;
[0023]
r为探测高度,单位千米;
[0024]
rc为不含气溶胶的洁净大气层所在高度,单位千米,可设定为25千米;
[0025]
p(r)为r处的回波信号,无因次;
[0026]
r为高度,单位千米;
[0027]
sm为大气分子后向散射比,无因次,取值8π/3;
[0028]
sa为气溶胶消光后向散射比,无因次。
[0029]
进一步地,步骤s5所述小波协方差函数的计算公式如下:
[0030][0031]
式中:
[0032]zt
为信号h距离上限,单位米;
[0033]
zb为信号h距离下限,单位米;
[0034]
a为相邻信号距离间隔,单位米;
[0035]
z为高度,单位米;
[0036]
e(z)为z处信号对应的气溶胶消光系数;
[0037]
wf(a,b)取得最小值时,对应的位置b即为边界层高度。
[0038]
本发明具有以下有益技术效果:
[0039]
在臭氧雷达监测臭氧时空分布的同时,可计算出大气边界层高度,计算结果与专门的气溶胶雷达监测结果相比,满足误差要求,实现臭氧雷达一物多用、降低城市污染监测治理成本;同时为分析大气逆温层,评估臭氧污染的扩散势能,提供了有效的数据支撑。
附图说明
[0040]
图1是实施例1在时间点t1、t2分别采用臭氧雷达和气溶胶雷达获得的反演消光数据。
[0041]
图2是实施例1在时间点t3、t4分别采用臭氧雷达和气溶胶雷达获得的反演消光数据。
[0042]
图3是实施例1分别采用臭氧雷达和气溶胶雷达获得的边界层高度。
[0043]
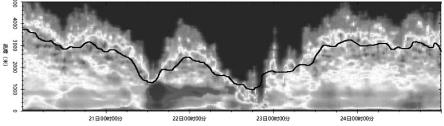
图4是实施例2利用臭氧雷达计算的边界层高度曲线。
具体实施方式
[0044]
下面结合说明书附图,对本发明的技术方案进行清楚、完整的描述。显然,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明的保护范围。
[0045]
实施例1
[0046]
臭氧雷达激光器产生266nm激光,通过拉曼管激发出另外的289nm和316nm两种不同波段的激光,三个波段激光通过扩束器放大光束直径后进入发射接收装置。三个波段的激光经过反射镜反射后进入大气环境中,与大气中的气溶胶颗粒等反射产生回波信号,回波信号进入发射接收装置后汇集并输出至光谱仪。光谱仪接收到回波信号后,经过内部处理分离出316nm回波信号,并输出至采集卡进行光子计数。
[0047]
选取某地区的臭氧雷达四天的监测数据,为了确定本方法计算的准确性,选择臭氧雷达附近的一台具备认证资质的气溶胶激光雷达同时段的监测数据作为标准比较。
[0048]
因为大气气溶胶消光是边界层高度的计算输入,为了验证本方法的正确性,首先需要确定大气气溶胶消光系数计算的准确性。
[0049]
从大气污染较重的一天中选择两个时间点t1、t2,使用臭氧雷达t1、t2时间点监测数据计算气溶胶消光系数,同时选择对应时间气溶胶激光雷达计算消光系数,绘制廓线图。使用3千米内的数据做比对,如图1所示。从图1可以看出,臭氧雷达和气溶胶雷达计算得到的消光系数非常相似,通过相似性计算,t1时间点两者相似度为93.7%,t2时间点两者相似度为90.5%,满足国标中关于激光雷达测量消光系数偏差不大于20%的标准。
[0050]
从大气污染较轻的一天中选择两个时间点t3、t4,使用臭氧雷达t3、t4时间点监测数据计算气溶胶消光系数,同时选择对应时间气溶胶激光雷达计算消光系数,绘制廓线图。使用8千米内的数据做比对,如图2所示。从图2可以看出,臭氧雷达和气溶胶雷达计算得到的消光系数非常相似,通过相似性计算,t3时间点两者相似度为93.7%,t4时间点两者相似度为91.5%,满足国标中关于激光雷达测量消光系数偏差不大于20%的标准。
[0051]
上述两组比对说明,臭氧雷达反演的消光系数,在不同天气条件下与气溶胶雷达反演的结果相似性很高。由于气溶胶消光系数在大气边界层位置附近有突变的特性,故而二者得到的边界层高度也非常一致,结果如图3所示。通过相似性计算,两者相似度为91.3%。表明通过臭氧雷达计算出的大气边界层高度,结果可靠。
[0052]
实施例2
[0053]
通过本发明提供的方法,使用某一段时间臭氧雷达监测数据,计算边界层高度数据并叠加至臭氧时空分布图谱,如图4所示。其中黑色线条为大气边界层高度。
[0054]
根据图4直观获知当边界层高度降低时,臭氧在近地面聚集,污染加重,反之当边界层高度升高时,臭氧在大气中扩散能力增强,近地面臭氧污染降低。这有利于研究臭氧污染变化的特征,首先可以根据边界层高度变化趋势,分析预测未来一段时间内臭氧污染变化情况;其次当监测到边界层高度降低时,可以及时采取手段,管控参与臭氧光化学反应前体物氮氧化物或挥发性有机物的排放,减少臭氧的产生,从而避免臭氧在近地面的堆积,形成臭氧污染爆表。
[0055]
尽管上面已经示出和描述了本发明的实施方式,可以理解的是,上述实施方式是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施方式进行变化、修改、替换和变型。本发明的保护范围由权利要求书及其等同技术方案限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。