一种边沿对齐式pwm调制方法
技术领域
1.本发明属于脉冲宽度调制(pulse-width modulation,pwm)领域,涉及一种适用于单母线电流传感器逆变器的pwm调制方法。
背景技术:
2.三相逆变器通常有两个或三个电流传感器用于获取三相系统的相电流,但是中小型变频器对成本要求较高,电流采样电路在整机成本中所占的比例不可忽略,且常规的多电流传感器存在着放大倍数不一致导致的电流谐波等问题。因此,采用单母线电流传感器检测母线电流并重构相电流,可避免传感器性能不一致而产生的误差,且可以降低系统成本,减小电机控制板体积。这对控制板尺寸、成本要求较高的场合有很高的应用价值。但是单母线电流传感器重构三相电流时会存在由于有效矢量作用时间过短,导致无法采集的有效相电流信息的问题。对于这个问题通常有以下一些解决方法:(1)pwm移相法。文献《考虑非观测区补偿的永磁同步电机单电阻采样重构》(魏海峰.等,江苏科技大学,2018)提出的解决方法是pwm移相方法,当采样有效矢量长度不足时,在保证pwm高电平持续时间不变的情况下移动pwm,使pwm呈现非对称形式来满足最小采样时间的要求。这种方法简单,但是每个pwm周期内的电流采样时刻相对位置都在变化,所采集到的电流与实际值之间会存在较大误差。(2)插入额外测量电压法。文献《current control for ac motor drives using a single dc-link current sensor and measurement voltage vectors》(hongrae kim.etc,ieee trans.ind.appl.2006)提出的基于施加额外的测量脉冲的解决方法,当有效矢量长度无法满足采样最小时间要求时,注入u4,u2,u1这三个额外的测量脉冲。这个方法存在着以下几个问题:由于额外测量脉冲的加入,导致调制比降低;开关次数的增加;电流谐波增大。(3)电流观测器法。文献《improved saliency-based position sensorless control of interior permanent-magnet synchronous machines with single dc-link current sensor using current prediction method》(jun-hyuk im.etc,trans.ind.electron.2018)则提出了一种电流观测器法,能够实现重构dq轴电流与零矢量采样结果一致,但是方法依赖电机参数。(4)改进拓扑的电流采样方法。文献《a novel open-circuit fault diagnosis method for voltage source inverters with a single current sensor》(hao yan.etc,ieee trans.power electron.)通过霍尔传感器同时采集到a和c相电流之和,然后利用电流解耦算法将相电流重构出来。但是这种方法需要利用霍尔传感器进行电流采样且需要改变硬件结构,这就导致这种方法在低成本的小型驱动器中是不适合的。
3.上述方法均能实现单母线电流传感器在不可观测器的电流重构,但是存在着以下一些问题:
4.(1)pwm移相方法不能保证电流采样时刻的固定,会导致重构得到的电流与实际值有较大误差;
5.(2)插入额外测量电压法存在着开关次数增加、采样次数增加等问题;
6.(3)通过电流观测器重构三相电流方法存在着计算量大的问题,不太适合受成本限制的低性能处理器应用场合;
7.(4)通过修改硬件电流采样拓扑利用单电流传感器实现三相电流重构的方法,一般采用基于电磁原理的电流传感器,如电流互感器、电流霍尔传感器或罗氏线圈等,这些电流传感器成本高、体积大、带宽低,限制了其在常规低成本方案中的使用。
技术实现要素:
8.为了解决已有单母线电流系统中存在的相电流采样及重构不准确、增加额外导通次数、依赖电机模型参数、成本高、体积大等问题,本发明提供了一种基于边沿对齐式pwm调制方法与常规方法相比,该方法调制易于实现,适用于低性能处理器,同时该方法不增加功率器件开关次数,且提高了三相电流重构精度。
9.为了解决上述技术问题本发明采用如下技术方案:
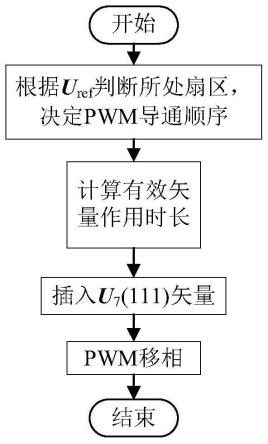
10.一种边沿对齐式pwm调制方法,包括以下步骤:
11.步骤1)根据合成电压矢量判断所处扇区,根据不同的扇区确定pwm的导通顺序;
12.步骤2)根据合成电压矢量计算有效矢量的作用时长;
13.步骤3)在已知有效矢量作用时间的基础上插入u7矢量;
14.步骤4)根据不同的扇区进行移相操作。
15.进一步,所述步骤1)中,合成电压矢量u
ref
可以由α轴电压矢量u
α
和β轴电压矢量u
β
进行表示,根据以下条件判断合成矢量的所处扇区:
16.当u
α
>0,u
β
>0且时,u
ref
处于第i扇区;
17.当u
β
>0且时,u
ref
处于第ii扇区;
18.当u
α
<0,u
β
>0且时,u
ref
处于第iii扇区;
19.当u
α
<0,u
β
<0且时,u
ref
处于第iv扇区;
20.当u
β
<0且时,u
ref
处于第vi扇区;
21.当u
α
<0,u
β
<0且时,u
ref
处于第iv扇区;
22.确定u
ref
所处扇区后,继续确定pwm的导通顺序:
23.第i扇区的pwm导通顺序为a、b、c;
24.第ii扇区的pwm导通顺序为b、a、c;
25.第iii扇区的pwm导通顺序为b、c、a;
26.第iv扇区的pwm导通顺序为c、b、a;
27.第v扇区的pwm导通顺序为c、a、b;
28.第vi扇区的pwm导通顺序为a、c、b。
29.再进一步,所述步骤2)中,根据合成电压矢量u
ref
计算有效矢量的作用时长:
30.当u
ref
处于第i扇区时,
[0031][0032]
式中,ts为pwm的周期,u
dc
为直流母线电压,θ为u
ref
与α轴之间的夹角,(1)式经过整理后得到:
[0033][0034]
同理可得,当u
ref
处于第ii扇区时,
[0035][0036]
当u
ref
处于第iii扇区时,
[0037][0038]
当u
ref
处于第iv扇区时,
[0039][0040]
当u
ref
处于第v扇区时,
[0041][0042]
当u
ref
处于第vi扇区时,
[0043][0044]
更进一步,所述步骤3)中,在已知有效矢量作用时间的基础上插入u7矢量,u7的持续时间为2t
min
,t
min
受adc采样时间t
adc
、电流形成时间t
delay
和逆变器死区时间t
dead
限制:
[0045]
t
min
≥t
adc
t
delay
t
dead
(8)
[0046]
插入u7矢量后,可得到u
ref
处于第i扇区时,abc相pwm的导通时长为:
[0047][0048]
当u
ref
处于第ii扇区时,abc相pwm的导通时长为:
[0049][0050]
当u
ref
处于第iii扇区时,abc相pwm的导通时长为:
[0051][0052]
当u
ref
处于第iv扇区时,abc相pwm的导通时长为:
[0053][0054]
当u
ref
处于第v扇区时,abc相pwm的导通时长为:
[0055][0056]
当u
ref
处于第vi扇区时,abc相pwm的导通时长为:
[0057][0058]
所述步骤4)中,根据不同的扇区进行移相操作,过程为:
[0059]
根据已经确定的pwm导通顺序进行移相操作:
[0060]
当u
ref
处于第i扇区时,abc三相pwm的上升下降时间分别为:
[0061][0062]
当u
ref
处于第ii扇区时,abc三相pwm的上升下降时间分别为:
[0063][0064]
当u
ref
处于第iii扇区时,abc三相pwm的上升下降时间分别为:
[0065][0066]
当u
ref
处于第iv扇区时,abc三相pwm的上升下降时间分别为:
[0067][0068]
当u
ref
处于第v扇区时,abc三相pwm的上升下降时间分别为:
[0069][0070]
当u
ref
处于第vi扇区时,abc三相pwm的上升下降时间分别为:
[0071][0072]
本发明的有益效果主要表现在:
[0073]
(1)所述方法实施简单,不增加控制器的运算负担,适用于低成本的控制器;
[0074]
(2)所述方法不增加开关次数和采样次数;
[0075]
(3)所述方法可以保证每个pwm周期均有足够的时间进行adc采样且采样时刻的相对固定,减小重构得到的电流与实际值的误差。
附图说明
[0076]
图1是本发明所述边沿对齐式pwm调制方法流程图。
[0077]
图2是合成电压矢量所处扇区示意图。
[0078]
图3是不同扇区的pwm导通顺序示意图。
[0079]
图4是以合成矢量处于第iii扇区为例的有效矢量作用时长示意图。
[0080]
图5是以合成矢量处于第iii扇区为例的有效矢量增加u7矢量示意图。
[0081]
图6是以合成矢量处于第iii扇区为例最终移相完成后的pwm示意图。
具体实施方式
[0082]
下面结合附图对本发明做进一步说明。
[0083]
参照图1~图6,一种边沿对齐式pwm调制方法,包括以下步骤:
[0084]
步骤1)根据合成电压矢量判断所处扇区,根据不同的扇区确定pwm的导通顺序;
[0085]
步骤2)根据合成电压矢量计算有效矢量的作用时长;
[0086]
步骤3)在已知有效矢量作用时间的基础上插入u7矢量;
[0087]
步骤4)根据不同的扇区进行移相操作。
[0088]
参照图2,所述步骤1)中,合成电压矢量u
ref
可以由α轴电压矢量u
α
和β轴电压矢量u
β
进行表示,根据以下条件判断合成矢量的所处扇区:
[0089]
当u
α
>0,u
β
>0且时,u
ref
处于第i扇区;
[0090]
当u
β
>0且时,u
ref
处于第ii扇区;
[0091]
当u
α
<0,u
β
>0且3时,u
ref
处于第iii扇区;
[0092]
当u
α
<0,u
β
<0且时,u
ref
处于第iv扇区;
[0093]
当u
β
<0且时,u
ref
处于第vi扇区;
[0094]
当u
α
<0,u
β
<0且时,u
ref
处于第iv扇区;
[0095]
参照图3,确定u
ref
所处扇区后,继续确定pwm的导通顺序:
[0096]
第i扇区的pwm导通顺序为a、b、c;
[0097]
第ii扇区的pwm导通顺序为b、a、c;
[0098]
第iii扇区的pwm导通顺序为b、c、a;
[0099]
第iv扇区的pwm导通顺序为c、b、a;
[0100]
第v扇区的pwm导通顺序为c、a、b;
[0101]
第vi扇区的pwm导通顺序为a、c、b;
[0102]
所述步骤2)中,根据合成电压矢量u
ref
计算有效矢量的作用时长:
[0103]
当u
ref
处于第i扇区时,
[0104][0105]
式中,ts为pwm的周期,u
dc
为直流母线电压,θ为u
ref
与α轴之间的夹角,(1)经过整理后得到:
[0106][0107]
同理可得,当u
ref
处于第ii扇区时,
[0108][0109]
当u
ref
处于第iii扇区时,
[0110][0111]
当u
ref
处于第iv扇区时,
[0112][0113]
当u
ref
处于第v扇区时,
[0114][0115]
当u
ref
处于第vi扇区时,
[0116][0117]
图4以u
ref
处于第iii扇区为实施例,此时有效矢量u2的作用时长u3的作用时长
[0118]
参照图5,所述步骤3)中,在已知有效矢量作用时间的基础上插入u7矢量,u7的持续时间为2t
min
,t
min
受adc采样时间t
adc
、电流形成时间t
delay
和逆变器死区时间t
dead
限制:
[0119]
t
min
≥t
adc
t
delay
t
dead
(8)
[0120]
插入u7矢量后,可得到u
ref
处于第i扇区时,abc相pwm的导通时长为:
[0121][0122]
当u
ref
处于第ii扇区时,abc相pwm的导通时长为:
[0123][0124]
当u
ref
处于第iii扇区时,abc相pwm的导通时长为:
[0125][0126]
当u
ref
处于第iv扇区时,abc相pwm的导通时长为:
[0127][0128]
当u
ref
处于第v扇区时,abc相pwm的导通时长为:
[0129][0130]
当u
ref
处于第vi扇区时,abc相pwm的导通时长为:
[0131][0132]
图5以u
ref
处于第iii扇区为实施例,图中阴影部分即为插入的u7矢量,插入u7矢量后,abc三相pwm的作用时间为:
[0133][0134]
参照图6,所述步骤4)中,根据不同的扇区进行移相操作。具体操作为:根据已经确定的pwm导通顺序进行移相操作,
[0135]
当u
ref
处于第i扇区时,abc三相pwm的上升下降时间分别为:
[0136][0137]
当u
ref
处于第ii扇区时,abc三相pwm的上升下降时间分别为:
[0138][0139]
当u
ref
处于第iii扇区时,abc三相pwm的上升下降时间分别为:
[0140][0141]
当u
ref
处于第iv扇区时,abc三相pwm的上升下降时间分别为:
[0142][0143]
当u
ref
处于第v扇区时,abc三相pwm的上升下降时间分别为:
[0144][0145]
当u
ref
处于第vi扇区时,abc三相pwm的上升下降时间分别为:
[0146][0147]
图6以u
ref
处于第iii扇区为实施例,图为移相后完成的三相pwm形式,三相pwm的上升下降时间为:
[0148][0149]
本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
