技术特征:
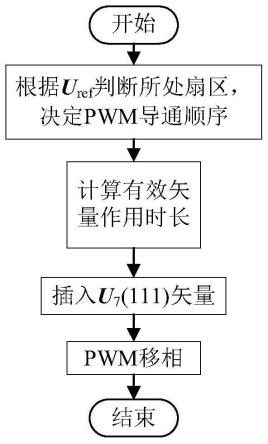
1.一种边沿对齐式pwm调制方法,其特征在于,所述方法包括以下步骤:步骤1)根据合成电压矢量判断所处扇区,根据不同的扇区确定pwm的导通顺序;步骤2)根据合成电压矢量计算有效矢量的作用时长;步骤3)在已知有效矢量作用时间的基础上插入u7矢量;步骤4)根据不同的扇区进行移相操作。2.根据权利要求1所述的一种边沿对齐式pwm调制方法,其特征在于,所述步骤1)中,合成电压矢量u
ref
可以由α轴电压矢量u
α
和β轴电压矢量u
β
进行表示,根据以下条件判断合成矢量的所处扇区:当u
α
>0,u
β
>0且时,u
ref
处于第i扇区;当u
β
>0且时,u
ref
处于第ii扇区;当u
α
<0,u
β
>0且时,u
ref
处于第iii扇区;当u
α
<0,u
β
<0且时,u
ref
处于第iv扇区;当u
β
<0且时,u
ref
处于第vi扇区;当u
α
<0,u
β
<0且时,u
ref
处于第iv扇区;确定u
ref
所处扇区后,继续确定pwm的导通顺序:第i扇区的pwm导通顺序为a、b、c;第ii扇区的pwm导通顺序为b、a、c;第iii扇区的pwm导通顺序为b、c、a;第iv扇区的pwm导通顺序为c、b、a;第v扇区的pwm导通顺序为c、a、b;第vi扇区的pwm导通顺序为a、c、b。3.根据权利要求1或2所述的一种边沿对齐式pwm调制方法,其特征在于,所述步骤2)中,根据合成电压矢量u
ref
计算有效矢量的作用时长:当u
ref
处于第i扇区时,式中,t
s
为pwm的周期,u
dc
为直流母线电压,θ为u
ref
与α轴之间的夹角,(1)式经过整理后得到:同理可得,当u
ref
处于第ii扇区时,
当u
ref
处于第iii扇区时,当u
ref
处于第iv扇区时,当u
ref
处于第v扇区时,当u
ref
处于第vi扇区时,4.根据权利要求3所述的一种边沿对齐式pwm调制方法,其特征在于,所述步骤3)中,在已知有效矢量作用时间的基础上插入u7矢量,u7的持续时间为2t
min
,t
min
受adc采样时间t
adc
、电流形成时间t
delay
和逆变器死区时间t
dead
限制:t
min
≥t
adc
t
delay
t
dead
(8)插入u7矢量后,可得到u
ref
处于第i扇区时,abc相pwm的导通时长为:
当u
ref
处于第ii扇区时,abc相pwm的导通时长为:当u
ref
处于第iii扇区时,abc相pwm的导通时长为:当u
ref
处于第iv扇区时,abc相pwm的导通时长为:当u
ref
处于第v扇区时,abc相pwm的导通时长为:
当u
ref
处于第vi扇区时,abc相pwm的导通时长为:5.根据权利要求4所述的一种边沿对齐式pwm调制方法,其特征在于,所述步骤4)中,根据不同的扇区进行移相操作,过程为:根据已经确定的pwm导通顺序进行移相操作:当u
ref
处于第i扇区时,abc三相pwm的上升下降时间分别为:当u
ref
处于第ii扇区时,abc三相pwm的上升下降时间分别为:当u
ref
处于第iii扇区时,abc三相pwm的上升下降时间分别为:
当u
ref
处于第iv扇区时,abc三相pwm的上升下降时间分别为:当u
ref
处于第v扇区时,abc三相pwm的上升下降时间分别为:当u
ref
处于第vi扇区时,abc三相pwm的上升下降时间分别为:
技术总结
一种边沿对齐式PWM调制方法,包括以下步骤:步骤1)根据合成电压矢量判断所处扇区,根据不同的扇区确定PWM的导通顺序;步骤2)根据合成电压矢量计算有效矢量的作用时长;步骤3)在已知有效矢量作用时间的基础上插入U7矢量;步骤4)根据不同的扇区进行移相操作。本发明解决了已有单母线电流系统中存在的相电流采样及重构过程中存在重构不准确、增加额外导通次数、依赖电机模型参数、成本高、体积大等问题。与常规方法相比,本发明提供的方法易于实现,计算量小,不增加功率器件开关次数,且提高了三相电流重构精度。三相电流重构精度。三相电流重构精度。
技术研发人员:吴春 郑露华 支恩
受保护的技术使用者:浙江工业大学
技术研发日:2022.07.11
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。