1.本发明属于机器人技术领域,具体涉及一种悬浮式机器人。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作,一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
3.现有技术存在的问题:
4.现有扫地机器人在工作时,当户主室内养了宠物类似于猫狗时,扫地机器人在移动的过程中,会扬起落在地面上的毛发,进而造成毛絮飞扬的问题,严重影响扫地机器人的工作;另外,在现如今病毒猖獗的情况下,传统的扫地机器人并不具备对室内进行消毒的功能,而宠物的运动,将增加病毒传播的风险。
技术实现要素:
5.本发明的目的是提供一种悬浮式机器人,能够有效吸收飘扬起的粉尘以及毛发,另外不仅能完成拖地的工作,还能提高拖地的清洁力度,且可自动实现清理圆柱棉拖的效果,保证圆柱棉拖能够重复多次使用,此外,还可实现对地面进行杀菌消毒的工作,装置能耗底,工作时间长,更适用于养宠物的家庭。
6.本发明采取的技术方案具体如下:
7.一种悬浮式机器人,包括悬浮清洁机器人,所述悬浮清洁机器人的上表面一侧内部固定安装有启动按键,所述悬浮清洁机器人的内部中心固定安装有集尘机构,所述悬浮清洁机器人的下表面内部一侧设置有转向机构,所述悬浮清洁机器人下表面位于所述转向机构的两侧均转动设置有清扫机构,所述悬浮清洁机器人内部底部的两侧均固定设置有驱动机构;
8.所述悬浮清洁机器人内部位于所述驱动机构的一侧均固定组装有浮物吸收机构,所述悬浮清洁机器人远离所述转向机构的一侧组装有地拖机构,所述悬浮清洁机器人内部靠近所述地拖机构的一侧固定设置有消毒组件,所述悬浮清洁机器人下表面靠近所述地拖机构的一侧活动嵌入有挡板;
9.所述驱动机构还包括驱动机罩,两个所述驱动机罩固定安装在所述悬浮清洁机器人的内部两侧,所述驱动机罩内部均固定设置有传动壳一,所述传动壳一的一端组装有驱动电机,所述传动壳一的另一端转动安装有驱动轮,所述驱动电机输出端与所述驱动轮通过所述传动壳一内部的链条传动连接;
10.所述浮物吸收机构还包括吸收器,所述吸收器的一端侧壁均转动安装有齿轮一,所述驱动机罩的外壁均转动安装有齿轮二,且所述齿轮一与所述齿轮二相啮合,所述齿轮二与所述驱动轮的轮轴一端通过套设的皮带一传动连接,所述吸收器另一端分别固定连接
有收集盒以及出气管,所述收集盒远离所述吸收器的一端固定连接有多孔吸管,所述收集盒靠近所述吸收器的内壁固定安装有滤网。
11.所述吸收器的内部一端转动安装有曲轴,且所述曲轴与所述齿轮一固定连接,所述曲轴末端转动连接有偏转杆,所述偏转杆的末端转动连接有活塞,且所述活塞滑动安装在所述吸收器的内部。
12.所述地拖机构还包括传动壳二,两个所述传动壳二均固定安装在所述悬浮清洁机器人的一侧,且所述传动壳二的底端共同转动连接有圆柱棉拖,所述传动壳二的顶端均转动安装有传动杆,且所述圆柱棉拖两端与所述传动杆之间通过传动壳二内部的链条传动连接。
13.所述传动杆的一端均固定套设有斜齿轮一,所述悬浮清洁机器人内部位于所述传动壳二的一侧均固定安装有工作电机,所述工作电机的输出端均固定安装有斜齿轮二,且所述斜齿轮一与所述斜齿轮二相啮合。
14.所述悬浮清洁机器人内部位于所述圆柱棉拖的正上方转动安装有双向螺纹丝杆,所述双向螺纹丝杆两端与两个所述传动杆均通过套设的皮带二传动连接,所述双向螺纹丝杆的外表面活动套设有螺套,所述螺套的外壁底侧固定连接有刮刷,且所述刮刷于所述圆柱棉拖的表面相贴合。
15.所述消毒组件还包括消毒液盒,两个所述消毒液盒均固定安装在所述悬浮清洁机器人的内部两侧,所述消毒液盒的上表面均连接有注液管,且所述注液管延伸至所述悬浮清洁机器人的上表面,所述消毒液盒的侧壁均固定安装有注射管,所述注射管的内部活动插入有活塞杆,所述活塞杆一端位于所述注射管的内部固定连接有内活塞,所述活塞杆的另一端固定连接有槽块,所述注射管的内部设置有弹簧。
16.所述注射管远离所述槽块的一端固定连接有三通管,所述三通管背离所述注射管的另外两端内部均安装有单向阀,所述三通管一端固定连接有吸液管,且所述吸液管与所述消毒液盒连接相通,所述三通管另一端共同连接有出液管,所述出液管外表面等距固定设置有喷嘴,且所述喷嘴朝向所述圆柱棉拖。
17.所述悬浮清洁机器人的下表面两侧均转动安装有底轮,两个所述消毒液盒的外壁均转动安装有带轮,所述带轮与所述底轮的一侧通过套设皮带三传动连接,所述带轮靠近所述消毒液盒的一侧固定连接有凸轮,且所述凸轮与所述槽块的内壁相贴合。
18.所述挡板靠近所述圆柱棉拖的内壁固定设置有倒向毛毡,且所述圆柱棉拖的旋转方向与所述驱动轮的旋转方向相反。
19.所述悬浮清洁机器人上表面中心固定安装有播放按板,所述悬浮清洁机器人上表面边缘固定安装有播音器,且所述播放按板与所述播音器电性连接。
20.本发明取得的技术效果为:
21.(1)本发明,当吸收器内部为负压时,悬浮清洁机器人附近飘扬的粉尘以及毛发将会通过多孔吸管被吸入到收集盒内部,此过程,能够在悬浮清洁机器人移动工作时,有效吸收飘扬起的粉尘以及毛发,更适用于养宠物的家庭,有效解决毛发飘扬的问题,大大提高悬浮清洁机器人的清洁力度,且,此吸收过程不需要额外的电力设备来实现,利用驱动轮旋转时的动能就可实现,不会带来额外的电力消耗。
22.(2)本发明,圆柱棉拖旋转,且圆柱棉拖的旋转方向与驱动轮的旋转方向相反,因
此,圆柱棉拖将充分与清扫后的地面相接触,不仅能完成拖地的工作,还能提高拖地的清洁力度;另外,刮刷将在圆柱棉拖表面往复来回移动使杂物聚集,聚集后的杂物更容易与倒向毛毡相接触,而倒向毛毡将实现杂物与圆柱棉拖完全的脱离,最终实现清理圆柱棉拖的效果,使圆柱棉拖能够重复多次使用,保证圆柱棉拖持久的清洁效果,最后,拆下挡板便可完成倒向毛毡的清洁。
23.(3)本发明,悬浮清洁机器人在移动的同时,消毒液将不断喷向圆柱棉拖的表面,进而实现浸湿圆柱棉拖的效果,使圆柱棉拖在拖地时,能够将消毒液涂抹在地面上,进而实现对地面进行杀菌消毒的效果;另外,此消毒过程不需要额外的电力设备来实现,利用悬浮清洁机器人在移动时的动能就可实现,进一步降低该机器人的电力消耗,使其在具备消毒功能的同时,还能够尽可能地延长工作时间。
24.(4)本发明,当室内的宠物踩到播放按板,播放按板便会使播音器通电并触发,此时播音器便会播放出预先录制的声音,从而实现驱赶宠物的效果,此装置,能够避免宠物把玩或者踩踏该机器人,避免机器人意外损坏,更适用于养宠物的家庭。
附图说明
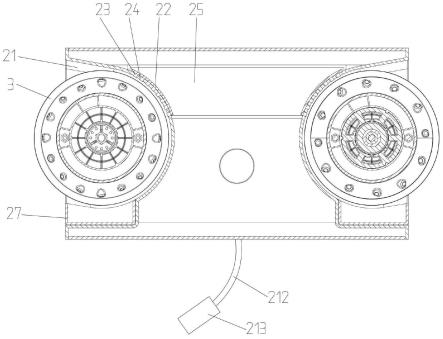
25.图1是本发明的实施例所提供的主视立体图;
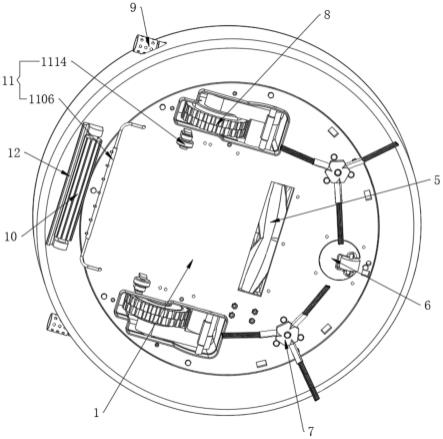
26.图2是本发明的实施例所提供的仰视立体图;
27.图3是本发明的实施例所提供的内部结构图;
28.图4是本发明的实施例所提供的驱动机构与浮物吸收机构的组装结构图;
29.图5是本发明的实施例所提供的吸收器的剖视结构图;
30.图6是本发明的实施例所提供的地拖机构的分解结构图;
31.图7是本发明的实施例所提供的消毒组件的结构图;
32.图8是本发明的实施例所提供的注射管的剖视结构图;
33.图9是本发明的实施例所提供的倒向毛毡的使用示意图。
34.附图中,各标号所代表的部件列表如下:
35.1、悬浮清洁机器人;2、启动按键;3、播放按板;4、播音器;5、集尘机构;6、转向机构;7、清扫机构;8、驱动机构;801、驱动机罩;802、传动壳一;803、驱动电机;804、驱动轮;9、浮物吸收机构;901、吸收器;902、齿轮一;903、齿轮二;904、皮带一;905、曲轴;906、偏转杆;907、活塞;908、收集盒;909、多孔吸管;910、滤网;911、出气管;10、地拖机构;1001、传动壳二;1002、圆柱棉拖;1003、传动杆;1004、斜齿轮一;1005、工作电机;1006、斜齿轮二;1007、双向螺纹丝杆;1008、皮带二;1009、螺套;1010、刮刷;11、消毒组件;1101、消毒液盒;1102、注液管;1103、注射管;1104、三通管;1105、吸液管;1106、出液管;1107、喷嘴;1108、活塞杆;1109、内活塞;1110、弹簧;1111、槽块;1112、带轮;1113、凸轮;1114、底轮;1115、皮带三;12、挡板;1201、倒向毛毡。
具体实施方式
36.为了使本发明的目的及优点更加清楚明白,以下结合实施例对本发明进行具体说明。应当理解,以下文字仅仅用以描述本发明的一种或几种具体的实施方式,并不对本发明具体请求的保护范围进行严格限定。
37.如图1-9所示,一种悬浮式机器人,包括悬浮清洁机器人1,悬浮清洁机器人1的上表面一侧内部固定安装有启动按键2,悬浮清洁机器人1的内部中心固定安装有集尘机构5,悬浮清洁机器人1的下表面内部一侧设置有转向机构6,悬浮清洁机器人1下表面位于转向机构6的两侧均转动设置有清扫机构7,悬浮清洁机器人1内部底部的两侧均固定设置有驱动机构8;
38.参照附图2和图3,悬浮清洁机器人1内部位于驱动机构8的一侧均固定组装有浮物吸收机构9,悬浮清洁机器人1远离转向机构6的一侧组装有地拖机构10,悬浮清洁机器人1内部靠近地拖机构10的一侧固定设置有消毒组件11,悬浮清洁机器人1下表面靠近地拖机构10的一侧活动嵌入有挡板12。
39.根据上述结构:驱动机构8用于控制悬浮清洁机器人1移动,转向机构6则用于辅助转向,移动过程中,清扫机构7用于清扫地面上的垃圾,而集尘机构5则用于将扫起的垃圾收集至自身内部。
40.实施例一:
41.参照附图4,驱动机构8还包括驱动机罩801,两个驱动机罩801固定安装在悬浮清洁机器人1的内部两侧,驱动机罩801内部均固定设置有传动壳一802,传动壳一802的一端组装有驱动电机803,传动壳一802的另一端转动安装有驱动轮804,驱动电机803输出端与驱动轮804通过传动壳一802内部的链条传动连接,驱动电机803工作,便可使驱动轮804旋转,进而驱动悬浮清洁机器人1移动。
42.参照附图4和图5,浮物吸收机构9还包括吸收器901,吸收器901的一端侧壁均转动安装有齿轮一902,驱动机罩801的外壁均转动安装有齿轮二903,且齿轮一902与齿轮二903相啮合,齿轮二903与驱动轮804的轮轴一端通过套设的皮带一904传动连接,驱动轮804旋转的同时,其轮轴在皮带一904的传动下将带动齿轮二903一同旋转,吸收器901另一端分别固定连接有收集盒908以及出气管911,收集盒908远离吸收器901的一端固定连接有多孔吸管909,收集盒908靠近吸收器901的内壁固定安装有滤网910,吸收器901的内部一端转动安装有曲轴905,且曲轴905与齿轮一902固定连接,再通过齿轮一902与齿轮二903的啮合传动下,齿轮一902会带动曲轴905在吸收器901的内部旋转,曲轴905末端转动连接有偏转杆906,偏转杆906的末端转动连接有活塞907,且活塞907滑动安装在吸收器901的内部,偏转杆906会带动活塞907在吸收器901的内部往复直线移动,此时吸收器901内部将不断形成正负压。
43.本发明的工作原理为:驱动电机803工作,便可使驱动轮804旋转,进而驱动悬浮清洁机器人1移动,驱动轮804旋转的同时,其轮轴在皮带一904的传动下将带动齿轮二903一同旋转,再通过齿轮一902与齿轮二903的啮合传动下,齿轮一902会带动曲轴905在吸收器901的内部旋转,紧接着,偏转杆906会带动活塞907在吸收器901的内部往复直线移动,此时吸收器901内部将不断形成正负压;
44.当吸收器901内部为负压时,悬浮清洁机器人1附近飘扬的粉尘以及毛发将会通过多孔吸管909被吸入到收集盒908内部,并最终经过滤网910实现固气分离,而当吸收器901内部为正压时,被吸入到吸收器901内部的空气将会由出气管911排出;
45.上述过程,能够在悬浮清洁机器人1移动工作时,有效吸收飘扬起的粉尘以及毛发,更适用于养宠物的家庭,有效解决毛发飘扬的问题,大大提高悬浮清洁机器人1的清洁
力度,且,此吸收过程不需要额外的电力设备来实现,利用驱动轮804旋转时的动能就可实现,不会带来额外的电力消耗。
46.实施例二:
47.参照附图6,地拖机构10还包括传动壳二1001,两个传动壳二1001均固定安装在悬浮清洁机器人1的一侧,且传动壳二1001的底端共同转动连接有圆柱棉拖1002,传动壳二1001的顶端均转动安装有传动杆1003,且圆柱棉拖1002两端与传动杆1003之间通过传动壳二1001内部的链条传动连接,传动杆1003的一端均固定套设有斜齿轮一1004,悬浮清洁机器人1内部位于传动壳二1001的一侧均固定安装有工作电机1005,工作电机1005的输出端均固定安装有斜齿轮二1006,且斜齿轮一1004与斜齿轮二1006相啮合,工作电机1005工作使斜齿轮二1006旋转,经过斜齿轮一1004与斜齿轮二1006的啮合则带动传动杆1003旋转,再通过传动壳二1001内部的链条,最终带动圆柱棉拖1002旋转。
48.参照附图6,悬浮清洁机器人1内部位于圆柱棉拖1002的正上方转动安装有双向螺纹丝杆1007,双向螺纹丝杆1007两端与两个传动杆1003均通过套设的皮带二1008传动连接,双向螺纹丝杆1007的外表面活动套设有螺套1009,螺套1009的外壁底侧固定连接有刮刷1010,且刮刷1010于圆柱棉拖1002的表面相贴合,传动杆1003旋转的同时,在皮带二1008的传动将带动双向螺纹丝杆1007一同旋转,根据双向螺纹丝杆1007的特性,螺套1009将在其表面往复来回移动,此时,刮刷1010将刮动圆柱棉拖1002表面附着的毛发杂物并使杂物聚集。
49.参照附图9,挡板12靠近圆柱棉拖1002的内壁固定设置有倒向毛毡1201,且圆柱棉拖1002的旋转方向与驱动轮804的旋转方向相反,可提高圆柱棉拖1002拖地的清洁力度。
50.本发明的工作原理为:工作电机1005工作使斜齿轮二1006旋转,经过斜齿轮一1004与斜齿轮二1006的啮合则带动传动杆1003旋转,再通过传动壳二1001内部的链条,最终带动圆柱棉拖1002旋转,且圆柱棉拖1002的旋转方向与驱动轮804的旋转方向相反,因此,圆柱棉拖1002将充分与清扫后的地面相接触,不仅能完成拖地的工作,还能提高拖地的清洁力度;
51.传动杆1003旋转的同时,在皮带二1008的传动将带动双向螺纹丝杆1007一同旋转,根据双向螺纹丝杆1007的特性,螺套1009将在其表面往复来回移动,此时,刮刷1010将刮动圆柱棉拖1002表面附着的毛发杂物并使杂物聚集,聚集后的杂物更容易与倒向毛毡1201相接触,而倒向毛毡1201将实现杂物与圆柱棉拖1002完全的脱离,最终实现清理圆柱棉拖1002的效果,使圆柱棉拖1002能够重复多次使用,保证圆柱棉拖1002持久的清洁效果,最后,拆下挡板12便可完成倒向毛毡1201的清洁。
52.实施例三:
53.参照附图7和图8,消毒组件11还包括消毒液盒1101,两个消毒液盒1101均固定安装在悬浮清洁机器人1的内部两侧,消毒液盒1101的上表面均连接有注液管1102,且注液管1102延伸至悬浮清洁机器人1的上表面,消毒液盒1101的侧壁均固定安装有注射管1103,注射管1103的内部活动插入有活塞杆1108,活塞杆1108一端位于注射管1103的内部固定连接有内活塞1109,活塞杆1108的另一端固定连接有槽块1111,注射管1103的内部设置有弹簧1110。
54.参照附图7,注射管1103远离槽块1111的一端固定连接有三通管1104,三通管1104
背离注射管1103的另外两端内部均安装有单向阀,三通管1104一端固定连接有吸液管1105,且吸液管1105与消毒液盒1101连接相通,三通管1104另一端共同连接有出液管1106,出液管1106外表面等距固定设置有喷嘴1107,且喷嘴1107朝向圆柱棉拖1002,通过吸液管1105将消毒液盒1101内部的消毒液抽入注射管1103内部,接着再由内活塞1109挤入出液管1106内部,消毒液进入出液管1106内部之后,最终由喷嘴1107喷向圆柱棉拖1002的表面,进而实现浸湿圆柱棉拖1002的效果。
55.参照附图7和图8,悬浮清洁机器人1的下表面两侧均转动安装有底轮1114,两个消毒液盒1101的外壁均转动安装有带轮1112,带轮1112与底轮1114的一侧通过套设皮带三1115传动连接,带轮1112靠近消毒液盒1101的一侧固定连接有凸轮1113,且凸轮1113与槽块1111的内壁相贴合,悬浮清洁机器人1在移动的同时,底轮1114将贴合地面旋转,在皮带三1115的传动下,将带动带轮1112以及凸轮1113一同旋转,由于凸轮1113与槽块1111的内壁相贴合,再配合弹簧1110,使得凸轮1113在旋转时,活塞杆1108将不断往复运动,因此注射管1103内部将不断做抽液和注液的工作。
56.本发明的工作原理为:悬浮清洁机器人1在移动的同时,底轮1114将贴合地面旋转,在皮带三1115的传动下,将带动带轮1112以及凸轮1113一同旋转,由于凸轮1113与槽块1111的内壁相贴合,再配合弹簧1110,使得凸轮1113在旋转时,活塞杆1108将不断往复运动,因此注射管1103内部将不断做抽液和注液的工作;
57.通过吸液管1105将消毒液盒1101内部的消毒液抽入注射管1103内部,接着再由内活塞1109挤入出液管1106内部,三通管1104内部的单向阀将保证液体的单向流动,消毒液进入出液管1106内部之后,最终由喷嘴1107喷向圆柱棉拖1002的表面,进而实现浸湿圆柱棉拖1002的效果,使圆柱棉拖1002在拖地时,能够将消毒液涂抹在地面上,进而实现对地面进行杀菌消毒的效果,另外,此消毒过程不需要额外的电力设备来实现,利用悬浮清洁机器人1在移动时的动能就可实现,进一步降低该机器人的电力消耗,使其在具备消毒功能的同时,还能够尽可能地延长工作时间。
58.实施例四:
59.参照附图1,悬浮清洁机器人1上表面中心固定安装有播放按板3,悬浮清洁机器人1上表面边缘固定安装有播音器4,且播放按板3与播音器4电性连接,预先在播音器4内部录制宠物较为讨厌的声音,播放按板3被踩踏时并会启动播音器4。
60.本发明的工作原理为:预先在播音器4内部录制宠物较为讨厌的声音,在悬浮清洁机器人1工作时,当室内的宠物踩到播放按板3,播放按板3便会使播音器4通电并触发,此时播音器4便会播放出预先录制的声音,从而实现驱赶宠物的效果,此装置,能够避免宠物把玩或者踩踏该机器人,避免机器人意外损坏,更适用于养宠物的家庭。
61.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。