技术特征:
1.一种围护结构弯矩估算方法,其特征在于,包括以下步骤:以围护结构顶部截面形心为坐标原点o,建立坐标系yoz;在所述围护结构上确定多个不同深度的测点,并获取所述围护结构在各测点处的变形测值;在坐标系yoz中假设所述围护结构的水平位移沿深度变化的拟合函数为在坐标系yoz中假设所述围护结构的水平位移沿深度变化的拟合函数为根据所述拟合函数计算得到各测点处的水平位移值,其中,z为所述测点与围护结构顶部截面之间距离,u(z)为在深度z处所述围护结构的水平位移值,a
i
为所述拟合函数的系数,i=0、1、
……
、m;基于各所述测点处的变形测值和水平位移值,得到累计残差函数其中,n为所述测点的数量,u(z
i
)为第i个所述测点处的水平位移值,y
i
为第i个所述测点处的变形测值;根据约束规则,构建预设数量个约束函数;基于所述累计残差函数和预设数量个约束函数,根据拉格朗日乘法,引入所述预设数量个拉格朗日因子,构建拉格朗日优化函数其中,l为所述预设数量,λ
k
为第k个拉格朗日乘数因子,为第k个所述约束函数,其中k=1、
……
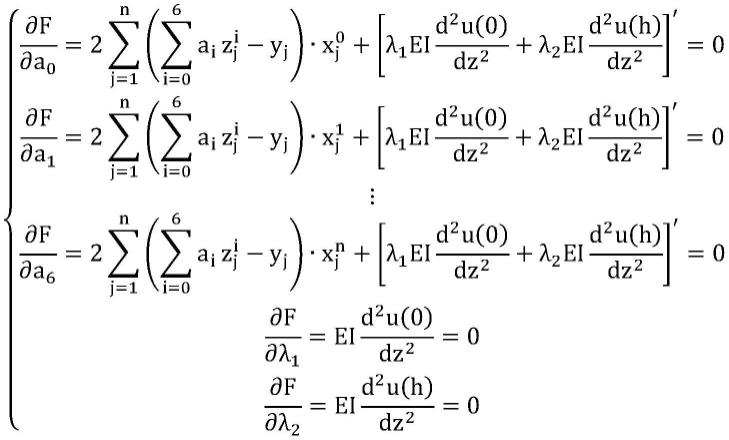
、l;对f求a
i
和λ
k
的偏导,并令偏导为零,计算得到u(z)的每个系数的值;基于计算得到的u(z)的每个系数的值,根据围护结构位移与弯矩的关系得到所述围护结构的弯矩沿深度变化的函数其中,e为围护结构的弹性模量,i为围护结构的截面惯性矩,为u(z)中系数a
i
的值。2.根据权利要求1所述的围护结构弯矩估算方法,其特征在于,所述根据约束规则,获取预设数量个约束函数的步骤包括:判断所述围护结构顶部是否有支撑结构;若所述围护结构顶部没有支撑结构,则得到所述约束函数和若所述围护结构顶部有支撑结构,确认所述支撑结构为铰接支撑还是固结支撑;若所述支撑结构为铰接支撑,则得到所述约束函数基于各所述测点处的变形测值,判断所述围护结构底端是否发生变形;若所述围护结构底端未发生变形,则得到所述约束函数其中,h为围护结构的高度;若所述围护结构底端发生变形,则得到所述约束函数3.根据权利要求1所述的围护结构弯矩估算方法,其特征在于,所述根据约束规则,获取预设数量个约束函数的步骤包括:
在多个所述测点中选取预设数量个目标测点,在各所述目标测点上埋设弯矩监测器;基于所述弯矩监测器测得的弯矩监测值,得到所述预设数量个约束函数基于所述弯矩监测器测得的弯矩监测值,得到所述预设数量个约束函数其中,z
k
为第i个所述目标测点与维护结构顶端之间的距离,b
k
为第i个所述目标测点上的弯矩监测器测得的弯矩监测值。4.根据权利要求1所述的围护结构弯矩估算方法,其特征在于,所述预设数量大于等于2。5.一种围护结构弯矩估算系统,其特征在于,包括:建立模块,用于以围护结构顶部截面形心为坐标原点o,建立坐标系yoz;确定模块,用于在所述围护结构上确定多个不同深度的测点,并获取所述围护结构在各测点处的变形测值;假设模块,用于假设所述围护结构的水平位移沿深度变化在坐标系yoz下的拟合函数为根据所述拟合函数计算得到各测点处的水平位移值,其中,z为所述测点与围护结构顶部截面之间距离,u(z)为在深度z处所述围护结构的水平位移值,a
i
为所述拟合函数的系数,i=0、1、
……
、m;第一得到模块,用于基于各所述测点处的变形测值和水平位移值,得到累计残差函数其中,n为所述测点的数量,u(z
i
)为第i个所述测点处的水平位移值,y
i
为第i个所述测点处的变形测值;获取模块,用于根据约束规则,获取预设数量个约束函数;第二得到模块,用于基于所述累计残差函数和预设数量个约束函数,根据拉格朗日乘法,引入所述预设数量个拉格朗日因子,构建拉格朗日优化函数其中,l为所述预设数量,λ
k
为第k个拉格朗日乘数因子,为第k个所述约束函数,其中k=1、2、
……
、l;计算模块,用于对f求a
i
和λ
k
的偏导,并令偏导为零,计算得到u(z)的每个系数的值;第三得到模块,用于基于计算得到的u(z)的每个系数的值,得到所述围护结构的弯矩沿深度变化的函数其中,e为围护结构的弹性模量,i为围护结构的截面惯性矩,为u(z)中系数a
i
的值。6.一种电子设备,包括储存器和处理器,所述储存器储存有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1-4任一项所述方法的步骤。7.一种计算机可读储存介质,其上储存有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-4任一项所述的方法的步骤。
技术总结
一种围护结构弯矩估算方法、系统、电子设备及存储介质,其中方法包括:建立坐标系YOZ;在围护结构上确定多个测点,并获取各测点处的变形测值;假设围护结构的水平位移沿深度变化的拟合函数为根据拟合函数计算各测点处的水平位移值;基于各测点处的变形测值和水平位移值,得到累计残差函数根据约束规则,获取预设数量个约束函数;基于累计残差函数和预设数量个约束函数,根据拉格朗日乘法,构建拉格朗日优化函数对F求a
技术研发人员:刘剑峰 武坤鹏 周红星 罗俊兴
受保护的技术使用者:中交第四航务工程局有限公司 广州港湾工程质量检测有限公司 南方海洋科学与工程广东省实验室(珠海)
技术研发日:2022.07.14
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。