1.本发明涉及智能交通领域,具体涉及一种交叉口车辆调度方法、装置及电子设备。
背景技术:
2.交叉口拥堵是造成城市拥堵的主要原因之一,一方面是城市道路中趋于饱和的车流,另一方是交叉口的控制策略。传统的信号控制算法本质上是以保障车辆安全为目的,是车辆安全和车流效率折中的做法。随着智能车道的发展,智能车能够通过车载传感器对车辆行为进行精准控制,并且能够进行车车和车地通信,因此智能车能够提前预知前方情况并提前计算较优的控制策略。随着自动驾驶技术以及车联网技术的不断发展,为城市无信号灯控制交叉口提供了更多可行的控制方案。
3.目前城市无信号灯控制交叉口方案主要方法为“先到先通行”,通过对车辆到达交叉口停车线的时间进行预测,对于先到达停车线的车辆采取优先通行的方案;而这种方案存在着明显的缺点,“先道先通行”方案会不断降低后到车辆的通行权,特别是速度较低的后到车辆的通行权,导致通行效率降低。
技术实现要素:
4.有鉴于此,有必要提供一种交叉口车辆调度方法、装置及电子设备,能够解决现有技术中基于“先到先通行”原则的方案,会不断降低后到车辆的通行权,以至于通行效率不高的技术问题。
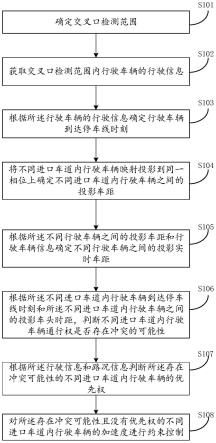
5.为了解决上述技术问题,本发明提供了一种交叉口车辆调度方法,包括:
6.确定交叉口检测范围;
7.获取交叉口检测范围内行驶车辆的行驶信息和路况信息;
8.根据所述行驶车辆的行驶信息确定行驶车辆到达停车线时刻;
9.将不同进口车道内行驶车辆映射投影到同一相位上确定不同进口车道内行驶车辆之间的投影车距;
10.根据所述不同进口车道内行驶车辆之间的投影车距和行驶车辆信息确定不同进口车道内行驶车辆之间的投影车头时距;
11.根据所述不同进口车道内行驶车辆到达停车线时刻和所述不同进口车道内行驶车辆之间的投影车头时距,判断不同进口车道内行驶车辆通行权是否存在冲突的可能性;
12.根据所述行驶信息和路况信息判断所述存在冲突可能性的不同进口车道内行驶车辆的优先权;
13.对所述存在冲突可能性且没有优先权的不同进口车道内行驶车辆的加速度进行约束控制。
14.在一些可能的实现方式中,确定交叉口的检测范围,包括:
15.获取交叉口宽度和当前进口车道车辆的期望速度;
16.根据所述当前进口车道车辆的期望速度和预设期望减速度确定进口车道检测长
度;
17.根据所述交叉口宽和进口车道检测长度确定交叉口检测范围。
18.在一些可能的实现方式中,所述交叉口检测范围内行驶车辆的行驶信息包括行驶车辆进入检测范围的时刻、行驶车辆的行驶速度和加速度;根据所述行驶车辆的行驶信息确定行驶车辆到达停车线时刻,包括:
19.根据所述行驶车辆进入检测范围的时刻确定所述行驶速度和加速度;
20.根据所述行驶车辆进入检测范围的行驶速度、加速度和进口车道检测长度确定行驶车辆到达停车线所需要的时间;
21.根据所述行驶车辆到达停车线的时间和所述行驶车辆进入检测范围的时刻确定行驶车辆到达停车线的时刻。
22.在一些可能的实现方式中,将不同进口车道内行驶车辆映射投影到同一相位上确定不同进口车道内行驶车辆之间的投影车距,包括:
23.通过映射的方式将不同进口车道内行驶车辆投影到同一相位上;
24.根据不同进口车道内行驶车辆行驶信息确定不同进口车道内行驶车辆之间投影车距。
25.在一些可能的实现方式中,所述行驶车辆的行驶信息包括行驶车辆的行驶速度和加速度;根据所述不同进口车道内行驶车辆之间的投影车距和行驶车辆信息确定不同行驶车辆之间的投影车头时距,包括:
26.根据所述不同进口车道内行驶车辆的行驶速度和加速度计算得到不同进口车道内行驶车辆在任一时刻的投影车距;
27.根据所述不同进口车道内行驶车辆的行驶速度和加速度确定不同进口车道内行驶车辆在任一对应时刻内车辆行驶的距离;
28.根据所述不同进口车道内行驶车辆在任一对应时刻内行驶的距离以及投影车距确定不同进口车道内行驶车辆之间的投影车头时距。
29.在一些可能的实现方式中,根据所述不同进口车道内行驶车辆到达停车线时刻和所述不同进口车道内行驶车辆之间的投影车距,判断不同进口车道内行驶车辆通行权是否存在冲突的可能性,包括:
30.当所述不同进口车道内行驶车辆到达停车线的时刻相同时,所述不同进口车道内行驶车辆的通行权存在冲突的可能性;
31.当所述不同进口车道内行驶车辆之间的投影车头时距在交叉口内小于安全时距时,所述不同进口车道内行驶车辆的通行权存在冲突的可能性。
32.在一些可能的实现方式中,所述路况信息包括不同交叉口车道的车流量大小,行驶信息包括车辆的的行驶方向;根据所述行驶信息和路况信息判断所述存在冲突可能性的不同进口车道内行驶车辆的优先权,包括:
33.对存在冲突可能性的不同进口车道内行驶车辆不同为左转或直行时,给予直行车辆优先权;
34.对存在冲突可能性的不同进口车道内行驶车辆同为左转或直行时给予行驶方向车流量大的车辆优先权;
35.当存在冲突可能性的不同进口车道内行驶车辆同为左转或直行时且车流量相同,
以存在冲突肯能性的车辆为参考物给予在其右侧的存在冲突肯能性的车辆以优先通行权。
36.在一些可能的实现方式中,对所述存在冲突可能性且没有优先权的不同进口车道内行驶车辆的加速度进行约束控制,包括:
37.改变存在冲突可能性且没有优先权的不同进口车道内行驶车辆的加速度,使存在冲突可能性的不同进口车道内行驶车辆的投影车头时距在安全时距范围内。
38.本发明还提供一种交叉口车辆调度系统,包括:
39.预设单元,确定交叉口检测范围;
40.获取单元,用于获取交叉口检测范围内行驶车辆的行驶信息和路况信息;
41.预测单元,根据所述行驶车辆的行驶信息确定行驶车辆到达停车线时刻;
42.投影车距确定单元,将不同进口车道内行驶车辆映射投影到同一相位上确定不同进口车道内行驶车辆之间的投影车距;
43.投影车头时距确定单元,根据所述不同进口车道内行驶车辆之间的投影车距和行驶车辆信息确定不同进口车道内行驶车辆之间的投影车头时距;
44.冲突判断单元,根据所述不同进口车道内行驶车辆到达停车线时刻和所述不同进口车道内行驶车辆之间的投影车头时距,判断不同进口车道内行驶车辆通行权是否存在冲突的可能性;
45.优先权判断单元,根据所述行驶信息和路况信息判断所述存在冲突可能性的不同进口车道内行驶车辆的优先权;
46.加速度控制单元,对所述存在冲突可能性且没有优先权的不同进口车道内行驶车辆的加速度进行约束控制。
47.另一方面,本发明还提供了一种电子设备,包括存储器和处理器,其中,所述存储器,用于存储程序;所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现上述任意一种实现方式中所述的交叉口车辆调度方法中的步骤。
48.另一方面,本发明还提供了一种计算机可读存储介质,用于存储计算机可读取的程序或指令,所述程序或指令被处理器执行时能够实现上述任意一种实现方式中所述的交叉口车辆调度方法中的步骤
49.与现有技术相比,本发明的有益效果包括:本发明首先通过设置交叉口检测范围,获取进入交叉口检测范围不同进口车道内行驶车辆的行驶信息和不同交叉口车道的路况信息;进而,根据行驶信息预测不同进口车道内行驶车辆到达停车线的时刻;其次,将不同进口车道内行驶车辆投影到同一车道确定投影车距,根据投影车距和行驶信息确定不同进口车道内行驶车辆的投影车头时距;然后,根据不同进口车道内行驶车辆到停车线的时间和投影车头时距判断行驶车辆通行权是否存在冲突的可能性;根据所述行驶信息和路况信息判断所述存在冲突可能性的不同进口车道内行驶车辆的优先权最后,对存在冲突可能性且没有优先权的不同进口车道内行驶车辆的加速度进行约束控制,使冲突车辆之间的投影车头时距在安全范围内。综上,通过对不同进口车道内行驶车辆,通行权是否存在冲突可能性的预测,对存在冲突的不同进口车道内行驶车辆加速度的控制,约束其存在冲突的车辆安全通过,提高了交叉口行驶车辆通行效率和安全性。
附图说明
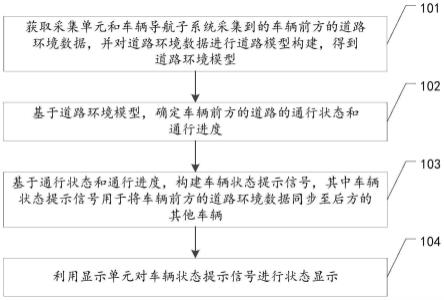
50.图1为本发明提供的一种交叉口车辆调度方法一实施例的流程示意图;
51.图2为本发明提供的一种设置交叉口检测范围一实施例的示意图;
52.图3为本发明提供的一种不同进口车道车辆投影映射一实施例的示意图;
53.图4为本发明提供的交叉口车辆调度装置一实施例的结构示意图;
54.图5为本发明提供的电子设备的一个实施例结构示意图。
具体实施方式
55.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
56.如图1,本发明提供的一种交叉口车辆调度方法一实施例的流程示意图,包括以下步骤:
57.步骤s101:确定交叉口检测范围;
58.步骤s102:获取交叉口检测范围内行驶车辆的行驶信息和路况信息;
59.步骤s103:根据所述行驶车辆的行驶信息确定行驶车辆到达停车线时刻;
60.步骤s104:将不同进口车道内行驶车辆映射投影到同一相位上确定不同进口车道内行驶车辆之间的投影车距;
61.步骤s105:根据所述不同行驶车辆之间的投影车距和行驶车辆信息确定不同行驶车辆之间的投影车头时距;
62.步骤s106:根据所述不同进口车道内行驶车辆到达停车线时刻和所述不同进口车道内行驶车辆之间的投影车头时距,判断不同进口车道内行驶车辆通行权是否存在冲突的可能性;
63.步骤s107:根据所述行驶信息和路况信息判断所述存在冲突可能性的不同进口车道内行驶车辆的优先权;
64.步骤s108:对所述存在冲突可能性且没有优先权的不同进口车道内行驶车辆的加速度进行约束控制。
65.与现有技术相比,本发明的有益效果包括:首先通过设置交叉口检测范围,获取进入交叉口检测范围不同进口车道内行驶车辆的行驶信息不同交叉口车道的路况信息;进而,根据行驶信息预测不同进口车道内行驶车辆到达停车线的时刻;其次,将不同进口车道内行驶车辆投影到同一车道确定投影车距,根据投影车距和行驶信息确定不同进口车道内行驶车辆的投影车头时距;然后,根据不同进口车道内行驶车辆到停车线的时间和投影车头时距判断行驶车辆通行权是否存在冲突的可能性;根据所述行驶信息和路况信息判断所述存在冲突可能性的不同进口车道内行驶车辆的优先权;最后,对存在冲突可能性的不同进口车道内行驶车辆的加速度进行约束控制,使冲突车辆之间的投影车头时距在安全范围内。综上,通过对不同进口车道内行驶车辆,通行权是否存在冲突可能性的预测,对存在冲突的不同进口车道内行驶车辆加速度的控制约束使存在冲突的车辆安全通过,提高了交叉口行驶车辆通行效率和安全性。
66.需要说明的是,交叉口检测范围是根据当前道路的最大限速以及期望减速度设备,使车辆道路最大限速行驶,驶入交叉口检测范围时开始以预设期望减速度减速至速度
为0时所行驶的路程来确定的。
67.还需要说明的是,同一相位是将交叉口不同进口车道分为不同相位,同一车道为同一相位。
68.进一步需要说明是,映射投影是以交叉口中心点为圆心,不同进口车道内行驶车辆距离圆心的距离为半径画圆,将不同进口车道内行驶的车辆以圆边为轨迹投影至同一相位。
69.进一步需要说明的是,在实施例中停车线可以是交叉口停止线或这斑马线。
70.在一些可能的实现方式中,确定交叉口的检测范围,包括:
71.获取交叉口宽度和当前进口车道车辆的期望速度;
72.根据所述当前进口车道车辆的期望速度和预设期望减速度确定进口车道检测长度;
73.根据所述交叉口宽和进口车道检测长度确定交叉口检测范围。
74.需要说的是,所述当前进口车道车辆的期望速度为该车道的最大限速,预设期望减速度为-1.5m/s2。
75.在具体的实施例中,如图2为设置交叉口检测范围的示意图,图中所示dc为进口车道检测长度,w为交叉口宽度;具体的所述交叉口检测范围的设置公式为:
76.cc=2dc w
77.式中,cc为交叉口控制范围的边长,w为交叉口的宽度,dc为进口车道检测长度。
[0078][0079]
式中,dc为进口车道检测长度,t
res
为行驶车辆的反应时间,ve为行驶车辆的预设期望减速度为该道路的最大限速,ae为车辆的预期减速度为-1.5m/s2。
[0080]
根据不同道路情况设置不同的检测范围,使检测范围标准化、获取的数据更准确更合理。
[0081]
在一些可能的实现方式中,所述交叉口检测范围内行驶车辆的行驶信息包括行驶车辆进入检测范围的时刻、行驶车辆的行驶速度和加速度;根据所述行驶车辆的行驶信息确定行驶车辆到达停车线时刻,包括:
[0082]
根据所述行驶车辆进入检测范围的时刻确定所述行驶速度和加速度;
[0083]
根据所述行驶车辆进入检测范围的行驶速度、加速度和进口车道检测长度确定行驶车辆到达停车线所需要的时间;
[0084]
根据所述行驶车辆到达停车线的时间和所述行驶车辆进入检测范围的时刻确定行驶车辆到达停车线的时刻。
[0085]
在具体的实施例中,通过进入交叉口检测范围的时刻确定行驶车辆进入交叉口检测范围的行驶速度和加速度;
[0086]
根据所述行驶车辆进入检测范围的行驶速度、加速度和进口车道检测长度确定行驶车辆到达停车线所需要的时间;
[0087]
所述行驶车辆到达停车线所需时间的计算公式如下:
[0088][0089]
式中,t
e,j
为行驶车辆i到达交叉口停车线的时间;vi为车辆i的当前速度;t
a,i
为车辆进入检测范围的时间;dc为交叉口控制线到停车线间的距离。
[0090]
在一些可能的实现方式中,将不同进口车道内行驶车辆映射投影到同一相位上确定不同进口车道内行驶车辆之间的投影车距,包括:
[0091]
通过映射的方式将不同进口车道内行驶车辆投影到同一相位上;
[0092]
根据不同进口车道内行驶车辆行驶信息确定不同进口车道内行驶车辆之间投影车距。
[0093]
在具体实时例中,所述投影车距可以通过行驶车辆的行驶速度和加速确定,所述投影车距具体参考图3,其中d
k,k-1
为车辆k和车辆k-1的投影车距。
[0094]
在具体实施例中,所述投影车距根据行驶车辆的行驶速度和加速度确定,投影车距计算公式具体如下:
[0095][0096]
式中,为投影车辆k和车辆k-1之间的车头间距即投影车距,是投影车辆k-1在t时刻的速度,是投影车辆k在t时刻的速度,是投影车辆k-1在t时刻的加速度,是投影车辆k在t时刻的加速度,为车辆k-1在进入交叉口检测范围到t-1时刻行驶的距离,为车辆k在进入交叉口检测范围到t-1时刻行驶的距离δt为1s。
[0097]
在一些可能的实现的方式中,所述行驶车辆的行驶信息包括行驶车辆的行驶速度和加速度;根据所述不同进口车道内行驶车辆之间的投影车距和行驶车辆信息确定不同行驶车辆之间的投影车头时距,包括:
[0098]
根据所述不同进口车道内行驶车辆的行驶速度和加速度计算得到不同进口车道内行驶车辆在任一时刻的投影车距;
[0099]
根据所述不同进口车道内行驶车辆的行驶速度和加速度确定不同进口车道内行驶车辆在任一对应时刻内车辆行驶的距离;
[0100]
根据所述不同进口车道内行驶车辆在任一对应时刻内行驶的距离以及投影车距确定不同进口车道内行驶车辆之间的投影车头时距。
[0101]
需要说明的是实时车距是代表着前后两辆车的前端通过同一地点的时间差,一般可使用前后车的车头间距除以后车速度来计算。实时车距代表当前车刹车时,后车驾驶员所具有的最大反应时间,因此它不随速度的变化而波动;投影车头时距,是不同进口车道内行驶车辆通过投影映射的方式将不同进口车道投影到同一相位上的行驶车辆之间的实时车距。
[0102]
在具体实施例中,所述不同进口车道内行驶车辆之间的投影车头时距,通过不同进口车道内行驶车辆在对应时刻内行驶的距离以及投影车距确定,所述不同进口车道的行驶车辆之间的投影车头时距公式如下:
[0103][0104]
式中,为t时刻车辆,投影车辆k和车辆k-1之间的投影车头时距,为投影车辆k和车辆k-1之间的车头间距即投影车距,是投影车辆k-1在t时刻的速度,是投影车辆k在t时刻的速度,是投影车辆k-1在t时刻的加速度,是投影车辆k在t时刻的加速度。
[0105]
通过求取投影车头时距,根据投影车头时距能够更好的反映行驶车辆的安全状况,且实时车距代表当前车刹车时,后车驾驶员所具有的最大反应时间,因此它不随速度的变化而波动,不受其他因素影响,反映的情况更真实,有利于对检测行驶车辆的安全状况。
[0106]
在一些有可能的实现方式中,根据所述不同进口车道内行驶车辆到达停车线时刻和所述不同进口车道内行驶车辆之间的投影车头时距,判断不同进口车道内行驶车辆通行权是否存在冲突的可能性,包括:
[0107]
当所述不同进口车道内行驶车辆到达停车线的时刻相同时,所述不同进口车道内行驶车辆的通行权存在冲突的可能性;
[0108]
当所述不同进口车道内行驶车辆之间的投影车头时距在交叉口内小于安全时距时,所述不同进口车道内行驶车辆的通行权存在冲突的可能性。
[0109]
在一些有可能的实现方式中,在一些可能的实现方式中,所述路况信息包括不同交叉口车道的车流量大小,行驶信息包括车辆的的行驶方向;根据所述行驶信息和路况信息判断所述存在冲突可能性的不同进口车道内行驶车辆的优先权,包括:
[0110]
对存在冲突可能性的不同进口车道内行驶车辆不同为左转或直行时,给予直行车辆优先权;
[0111]
对存在冲突可能性的不同进口车道内行驶车辆同为左转或直行时给予行驶方向车流量大的车辆优先权;
[0112]
当存在冲突可能性的不同进口车道内行驶车辆同为左转或直行时且车流量相同,以存在冲突肯能性的车辆为参考物给予在右侧的存在冲突肯能性的车辆以优先通行权。
[0113]
需要注意的时,当存在冲突可能性的不同进口车道内行驶车辆同为左转或直行时且车流量相同,以存在冲突肯能性的车辆为参考物,在右侧的有优先权。
[0114]
在一些有可能的实现方式中,对所述存在冲突可能性且没有优先权的不同进口车道内行驶车辆的加速度进行约束控制,包括:改变存在冲突可能性且没有优先权的不同进口车道内行驶车辆的加速度,使存在冲突可能性的不同进口车道内行驶车辆的投影车头时距在安全时距范围内。
[0115]
在具体实施例中,使存在冲突可能性且没有优先权的不同进口车道内行驶车辆以最小时间通过交叉口所需要的加速度行驶,其中存在冲突可能性且没有优先权的不同进口车道内行驶车辆以最小时间通过交叉口所需要的加速度行驶根据在车头时距以及最大加速度、最大速度等约束条件下,利用遗传算法计算求解出最优的加速度出以最小时间通过交叉口所需要的加速度。
[0116]
在具体实施例中,通过交叉口的最小时间的计算公式如下:
[0117][0118]
式中,n就是检测范围内的所有冲突的车车辆数,m是相位数,t
i,j
为相位j上的车辆i在交叉口内的行驶时间,j为行驶车辆通过交叉口的最小时间。
[0119]
在具体实施例中,交叉口内的行驶时间定义为,车辆进入交叉口检测范围,到车辆驶出交叉口(并未驶出交叉口控制范围)所需的时间,其可以被表示为:
[0120][0121]
式中,v
i,j
与a
i,j
分别为相位j中的车辆i速度以及加速度;δt为行驶车辆控制精度为1s。
[0122]
需要注意的是,所述存在冲突可能性且没有优先权的不同进口车道内行驶车辆的加速度还受到行驶车辆的性能和道路最大限速约束,及:
[0123]ar,max
≤a
i,j
≤a
s,max
[0124]ai,j
δt≤v
max-v
i,j
[0125]
其中,a
r,max
车辆的最大减速度,a
s,max
车辆的最大加速度,v
max
为道路的最大限速,δt为行驶车辆控制精度,v
i,j
为车道j中第i辆车的速度。
[0126]
在具体的实施例中,改变后的存在冲突可能性的不同进口车道内行驶车辆的加速度,应该使存在冲突可能性的不同进口车道内行驶车辆的投影车头时距在安全时距范围内,即不同进口车道内行驶车辆的投影车头时距大于等于安全时距,具体表示为:
[0127][0128]
式中,为t时刻车辆,投影车辆k和车辆k-1之间的投影车头时距,为投影车辆k和车辆k-1之间的车头间距即投影车距,是投影车辆k-1在t时刻的速度,是投影车辆k在t时刻的速度,是投影车辆k-1在t时刻的加速度,是投影车辆k在t时刻的加速度,h为安全时距。
[0129]
为了更好实施本发明实施例中的,在车辆交叉口调度方法方法基础之上,对应的,本发明实施例还提供了一种车辆交叉口调度方法装置,如图5所示,交叉口车辆调度方法400包括:
[0130]
预设单元501,确定交叉口检测范围;
[0131]
获取单元402,用于获取交叉口检测范围内行驶车辆的行驶信息;
[0132]
预测单元403,根据所述行驶车辆的行驶信息确定行驶车辆到达停车线时刻;
[0133]
投影车距确定单元404,将不同进口车道内行驶车辆映射投影到同一相位上确定不同进口车道内行驶车辆之间的投影车距;
[0134]
投影车头时距确定单元405,根据所述不同进口车道内行驶车辆之间的投影车距和行驶车辆信息确定不同进口车道内行驶车辆之间的投影车头时距;
[0135]
冲突判断单元406,根据所述不同进口车道内行驶车辆到达停车线时刻和所述不
同进口车道内行驶车辆之间的投影车头时距,判断不同进口车道内行驶车辆通行权是否存在冲突的可能性;
[0136]
优先权判断单元407:根据所述行驶信息和路况信息判断所述存在冲突可能性的不同进口车道内行驶车辆的优先权
[0137]
加速度控制单元408,对所述存在冲突可能性的不同进口车道内行驶车辆的加速度进行约束控制。
[0138]
在具体实施例中,交叉口车辆调度装置还包括通行单元,将加速度控制单元的控制命令发送给行驶车辆。
[0139]
如图4所示,本发明还相应提供了一种电子设备500。该电子设备 500包括处理器501、存储器502。图4仅示出了电子设备500的部分组件,但是应理解的是,并不要求实施所有示出的组件,可以替代的实施更多或者更少的组件。
[0140]
处理器501在一些实施例中可以是一中央处理器(centralprocessing unit,cpu),微处理器或其他数据处理芯片,用于运行存储器502中存储的程序代码或处理数据,例如本发明中的交叉口车辆调度方法。
[0141]
在一实施例中,当处理器501执行存储器502中的交叉口车辆调度时,可实现以下步骤:
[0142]
确定交叉口检测范围;
[0143]
获取交叉口检测范围内行驶车辆的行驶信息;
[0144]
根据所述行驶车辆的行驶信息确定行驶车辆到达停车线时刻;
[0145]
将不同进口车道内行驶车辆映射投影到同一相位上确定不同进口车道内行驶车辆之间的投影车距;
[0146]
根据所述不同进口车道内行驶车辆之间的投影车距和行驶车辆信息确定不同进口车道内行驶车辆之间的投影车头时距;
[0147]
根据所述不同进口车道内行驶车辆到达停车线时刻和所述不同进口车道内行驶车辆之间的投影车头时距,判断不同进口车道内行驶车辆通行权是否存在冲突的可能性;
[0148]
对所述存在冲突可能性的不同进口车道内行驶车辆的加速度进行约束控制。
[0149]
本发明实施例,基于“先到先通行”原则让先到达停车线的车辆优先通行;通过映射的方式将不同进口车道内的行驶车辆投影到同一相位求取投影车距并根据投影车距确定车辆之间的实时车距;通过实时车距判断车辆是否存在冲突的可能性;根据道路况信息和车辆行驶信息判断存在冲突车辆的优先权;对于存在冲突且没有优先权的车辆,对其加速进行控制使其车辆之间的投影车头时距在安全范围内提高交叉口的通行效率和安全性。
[0150]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。