1.本发明涉及交通安全、危险识别领域,具体涉及一种基于隐式马尔可夫链的危险跟驰行为识别方法。
背景技术:
2.随着我国城市化水平的进一步提高和道路系统的不断完善,汽车已成为人们必不可少的交通工具。根据历史数据统计,我国每年有超过10万人死于交通事故,其中人为因素导致的交通事故占到总事故数的80%,其外在表现就是“危险驾驶行为”。因此,对行驶过程中潜在的危险行为进行识别,对道路交通安全和运行效率的提升具有现实意义和社会效益。
3.目前,针对危险驾驶行为识别的研究,主要分为三个方面:一方面,研究者们对驾驶行为的表征参数进行了研究,驾驶人生理参数获取方式为侵入式,在实时性和应用性上有所欠缺,车辆动力学参数的研究大多只针对自车信息进行提取,未能充分考虑潜在危险行为附近的微观交通流条件以及车辆与周围更多车辆的交互作用;另一方面,专家学者对危险行为的标定方法进行了讨论,研究多使用单一安全替代指标进行描述,并以固定阈值进行危险判定,忽略了车辆动态特征以及车辆在空间和时间两个维度的潜在危险;最后,机器学习算法常被用于车辆换道、转弯等驾驶行为的识别,意图识别模型比较丰富,对危险行为的识别研究较少。
技术实现要素:
4.本发明的技术解决问题:解决以上现有的危险行为识别方法所存在的问题,提供一种基于隐式马尔可夫链的危险跟驰行为识别方法,大大提高了驾驶安全性,有效避免交通事故的产生。且本发明的识别方法与驾驶人实际的跟驰行为和危险感知更为相符,有着更强的理论依据和更好的普适性。
5.本发明的技术方案:一种基于隐式马尔可夫链的危险跟驰行为识别方法,其特征在于,包括以下步骤:
6.步骤1:采集路段车辆信息,提取车辆跟驰行为片段,建立多维度数据集s,多维度数据集s包括描述自车与周围车辆交互行为的数据集s
cfw
以及描述路段交通流特征的数据集s
cfh
;所述数据集s
cfw
共包含自车速度、前车速度、自车加速度、前车加速度、车头间距、车头时距、前后两车相对速度和加速度8个特征;数据集s
cfh
共包含路段交通量、车流密度、路段车辆时间平均车速、平均加速度、速度标准差以及加速度标准差6个特征;
7.s
cfw
={v,v
p
,a,a
p
,sh,th,δv,δa}
[0008][0009]
其中,v为自车速度;v
p
为前车速度;a为自车加速度;a
p
为前车加速度;sh为车头间距;th为车头时距;δv为自车与前车相对速度;δa为自车与前车相对加速度;q为路段交通量;k为路段车流密度;为路段车辆时间平均车速;为路段车辆平均加速度;σv为路段车
速标准差;σa为路段加速度标准差;
[0010]
步骤2:基于步骤1中的数据集s
cfw
,分别计算车辆的时间危险量化指标、距离危险量化指标和减速度危险量化指标;所述时间危险量化指标包括碰撞时间ttc和改进碰撞时间mttc;距离危险量化指标包括可接受最小停车距离msd和紧急减速碰撞指数picud;所述减速度危险量化指标是指避免碰撞减速度drac;使用各指标熵值和模糊规则,对这五种危险量化指标进行融合,得到时空综合维度的危险量化指标dmi;
[0011]
步骤3:利用步骤2的时空综合维度的危险量化指标dmi,计算得到不同道路交通服务水平下的车辆每一时刻危险量化值的累积分布曲线,当累积分布《90%时为低风险,dmi累积分布≥90%时为高风险,并根据车辆每一时刻的风险状态标定得到观测序列内车辆的跟驰状态;
[0012]
步骤4:对步骤1中的多维度数据集s中的各个特征进行统计学扩增,计算各个特征的最大值、最小值、平均值和差分值,构成新的数据集s
′
,s
′
包括特征扩增后的自车与周围车辆交互行为的数据集s
′
cfw
以及特征扩增后的路段交通流特征的数据集s
′
cfh
;采用随机森林算法分别对s
′
cfw
与s
′
cfh
数据集中影响危险跟驰行为识别结果的特征进行重要度排序及筛选,得到危险跟驰行为识别模型的输入f;
[0013]
步骤5:利用步骤3得到的车辆跟驰状态和步骤4的输入f,结合高斯函数与隐马尔可夫模型,构建并训练高斯混合隐马尔可夫模型gmm-hmm,由此实现危险跟驰行为的识别。
[0014]
进一步,所述步骤2中,对五种危险量化指标进行融合,得到时空综合维度的危险量化指标dmi的步骤如下:
[0015]
a.构建原始评价矩阵d=(d
ij
)n×m,其中,n为车辆跟驰片段中的总时间戳个数;m为危险量化指标的个数;d
ij
表示在车辆跟驰片段中第i个时间戳对应的第j个危险量化指标,共有ttc、mttc、msd、picud、drac五种危险量化指标;
[0016]
b.对五种危险量化指标进行归一化处理;
[0017]
c.计算第j个危险量化指标的熵值ej;
[0018][0019][0020]
其中,为归一化后的d
ij
;p
ij
为第j个危险指标中第i个时间戳所占的比重;ej为第j个危险指标的熵值;
[0021]
d.计算第j个危险量化指标的权重ωj;
[0022][0023]
e.基于历史数据相关性及模糊规则获得独立性权重δj,最终确定各指标的综合权重gj,计算得到时空综合维度的危险量化指标dmi;
[0024]
[0025][0026]
其中,δj为第j个危险量化指标基于模糊规则获得的独立性权重;ωj为第j个危险量化指标基于熵值法获得的客观权重;为各指标客观权重的平均值;gj为各危险量化指标的最终权重;dmii为车辆跟驰片段中第i个时间戳的危险量化值。
[0027]
进一步,所述步骤3中,对车辆跟驰状态的标定方法具体为:首先,以dmi累积分布90%为车辆风险状态阈值,得到交通服务水平分别在一、二、三、四等级下的车辆风险状态p;其次,以1个连续时间戳作为一个车辆跟驰行为的观测序列,t为观测序列长度,该观测序列车辆跟驰状态g的标定方法如下:
[0028][0029][0030]
其中,pi为i时刻车辆的风险状态;dmi
threshold,k
为交通服务水平为k时危险量化指标的阈值;δt为该帧的时长;n为该观测序列的时间戳总个数即总帧数;t为观测序列的长度。
[0031]
进一步,所述步骤5中,所述高斯混合隐马尔可夫模型gmm-hmm模型为:
[0032]
λg={π,a,c,μ,u}
[0033]
π=(πi)
[0034]
a=[a
ij
]n×n[0035]aij
=p(q
t 1
=sj|q
t
=si)
[0036]
c=[c
jg
]n×g[0037]
μ=(μj)
[0038]
u=(uj)
[0039]
其中,λg为模型参数集合;
[0040]
π为起始状态概率向量,πi表示初始时刻处于状态si的概率,状态变量分别为危险跟驰状态和安全跟驰状态,π是一个二维向量;
[0041]
a为状态转移概率矩阵,a
ij
表示q
t
时刻隐状态为si的情况下,q
t 1
时刻状态为sj的概率,n为状态变量个数,n=2,所以a是一个2
×
2的矩阵;
[0042]
c为危险跟驰状态和安全跟驰状态下混合高斯模型的分布权重系数矩阵,c
jg
表示第j个隐状态下第g个单高斯模型的权重,g为隐状态的时高斯分量的数目;
[0043]
μ是m个混合成分的均值向量的集合,μj表示的是j个隐状态的特征变量均值向量;
[0044]
u是n
×
g个混合成分的协方差矩阵的集合,uj表示的是第j个隐状态的特征变量协方差矩阵。
[0045]
本发明与现有技术相比的优点在于:
[0046]
本发明的方法在考虑车辆动力学和交通流参数的基础上,建立多维度驾驶人跟驰行为集;基于熵值法与数学统计方法,从时空综合维度对车辆跟驰行为进行动态风险评估
和危险量化;并根据量化标定结果与隐式马尔可夫链理论,对车辆危险跟驰这类不可观测的驾驶状态进行识别,在很大程度上对危险跟驰行为进行提前预警,大大提高驾驶安全性,有效避免交通事故的产生。且本发明的方法与驾驶人实际的跟驰行为和危险感知更为相符,有着更强的理论依据和更好的普适性。
附图说明
[0047]
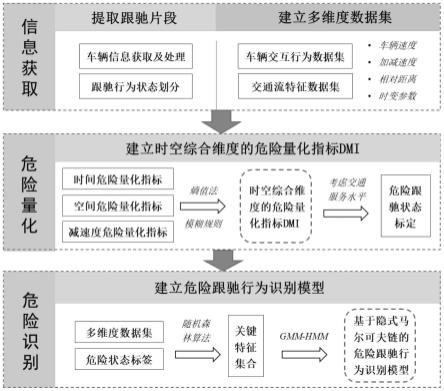
图1为本发明的整体思路框图;
[0048]
图2为危险跟驰行为识别过程图。
具体实施方式
[0049]
下面结合附图和实施方案对本发明进行详细的描述。应理解该实例仅用于说明本发明而不用于限制本发明的范围。
[0050]
如图1所示,本发明的一种基于隐式马尔可夫链的危险跟驰行为识别方法,具体包括以下步骤:
[0051]
步骤1:采集路段车辆信息,提取车辆跟驰行为片段,建立多维度数据集s。
[0052]
(1)车辆跟驰行为是指在连续的交通流中的车辆不进行换道操作,而是跟驰前车行驶的行为,后车的驾驶行为主要受到前车的影响,因此对于跟驰状态的提取多基于车头时距、车间距及持续时间等指标。为了避免选取的驾驶行为片段车辆处于自由流行驶状态或换道准备阶段,本发明对跟驰行为片段的提取标准做以下定义:车头间距sh<120m,持续时t>10s。
[0053]
(2)根据采集得到的路段车辆信息,提取车辆跟驰行为片段,建立多维度数据集s,多维度数据集s包括描述自车与周围车辆交互行为的数据集s
cfw
以及描述路段交通流特征的数据集s
cfh
;所述数据集s
cfw
共包含自车速度、前车速度、自车加速度、前车加速度、车头间距、车头时距、前后两车相对速度和加速度8个特征;数据集s
cfh
共包含路段交通量、车流密度、路段车辆时间平均车速、平均加速度、速度标准差以及加速度标准差6个特征;
[0054]scfw
={v,v
p
,a,a
p
,sh,th,δv,δa}
[0055][0056]
其中,v为自车速度;v
p
为前车速度;a为自车加速度;a
p
为前车加速度;sh为车头间距;th为车头时距;δv为自车与前车相对速度;δa为自车与前车相对加速度;q为路段交通量;k为路段车流密度;为路段车辆时间平均车速;为路段车辆平均加速度;σv为路段车速标准差;σa为路段加速度标准差;
[0057]
数据集中特征v,v
p
,a,a
p
,sh可以通过无人机视频数据直接获得,其他特征的计算公式如下:
[0058][0059]
δv=v-v
p
[0060]
δa=a-a
p
[0061][0062][0063]
k=u/l
[0064][0065][0066][0067]
其中,u为无人机拍摄路段第i个时间戳车辆数目;vr为第i个时间戳路段上第r辆车的速度;ar为第i个时间戳路段上第r辆车的加速度;l为无人机拍摄路段长度。
[0068]
步骤2:基于步骤1中的数据集s
cfw
,分别计算车辆的时间危险量化指标、距离危险量化指标和减速度危险量化指标;所述时间危险量化指标包括碰撞时间ttc和改进碰撞时间mttc;距离危险量化指标包括可接受最小停车距离msd和紧急减速碰撞指数picud;所述减速度危险量化指标是指避免碰撞减速度drac;使用各指标熵值和模糊规则,对这五种危险量化指标进行融合,得到时空综合维度的危险量化指标dmi;
[0069]
(1)计算五种危险量化指标
[0070]
a.构建原始评价矩阵d=(d
ij
)n×m,其中,n为车辆跟驰片段中的总时间戳个数;m为危险量化指标的个数;d
ij
表示在车辆跟驰片段中第i个时间戳对应的第j个危险量化指标,共有ttc、mttc、msd、picud、drac五种危险量化指标;
[0071][0072][0073][0074][0075][0076]
其中,a
max
为车辆最大减速度,一般取5m/s2;
[0077]
b.对数据进行归一化处理;
[0078]
index(ij)={ttc,mttc,msd,picud,drac} j=1,2,3,4,5
[0079][0080]
其中,归一化后的d
ij
为为第j个量化指标所有时间戳中的最小值,为第j个量化指标所有时间戳中的最大值。
[0081]
(2)建立时空综合维度的危险量化指标dmi
[0082]
a.计算第j个危险量化指标的熵值ej;
[0083][0084][0085]
其中,p
ij
为第j个危险指标中第i个时间戳所占的比重;ej为第j个危险指标的熵值;
[0086]
b.计算第j个危险量化指标的权重ωj;
[0087][0088]
c.基于历史数据相关性及模糊规则获得独立性权重δj,最终确定各指标的综合权重gj,计算得到时空综合维度的危险量化指标dmi;
[0089][0090][0091]
其中,δj为第j个危险量化指标基于模糊规则获得的独立性权重;ωj为第j个危险量化指标基于熵值法获得的客观权重;为各指标客观权重的平均值;gj为各危险量化指标的最终权重;dmii为车辆跟驰片段中第i个时间戳的危险量化值。
[0092]
步骤3:利用步骤2的时空综合维度的危险量化指标dmi,计算得到不同道路交通服务水平下的车辆每一时刻危险量化值的累积分布曲线,当累积分布<90%时为低风险,dmi累积分布≥90%时为高风险,并根据车辆每一时刻的风险状态标定得到观测序列内车辆的跟驰状态;
[0093]
根据中国高速公路服务水平划分标准,可基于宏观跟驰行为集s
cfh
确定自车所处的交通环境,分别获取服务水平为一、二、三、四级下车辆每一时刻危险量化值的累积分布曲线,当累积分布<90%时为低风险,dmi累积分布≥90%时为高风险。其次,以l个连续时间戳作为一个车辆跟驰行为的观测序列,t为观测序列长度,该观测序列车辆跟驰状态g的标定方法如下:
[0094][0095][0096]
其中,pi为i时刻车辆的风险状态;dmi
threshold,k
为交通服务水平为k时危险量化指标的阈值;δt为该帧的时长;n为该观测序列的总帧数;t为观测序列的长度。
[0097]
最终可获得:一级服务水平下安全与危险跟驰状态、二级服务水平下安全与危险跟驰状态、三级服务水平下安全与危险跟驰状态、四级服务水平下安全与危险跟驰状态,共计8种跟驰状态。
[0098]
步骤4:对步骤1中的多维度数据集s中的各个特征进行统计学扩增,计算各个特征的最大值、最小值、平均值和差分值,构成新的数据集s
′
,s
′
包括特征扩增后的自车与周围车辆交互行为的数据集s
′
cfw
以及特征扩增后的路段交通流特征的数据集s
′
cfh
;采用随机森林算法分别对s
′
cfw
与s
′
cfh
数据集中影响危险跟驰行为识别结果的特征进行重要度排序及筛选,得到危险跟驰行为识别模型的输入f;
[0099]
步骤5:利用步骤3得到的车辆跟驰状态和步骤4的输入f,结合高斯函数与隐马尔可夫模型,构建并训练高斯混合隐马尔可夫模型gmm-hmm,由此实现危险跟驰行为的识别。
[0100]
(1)模型建立,使用混合高斯函数来拟合连续性的观测值,混合高斯概率密度的形式为:
[0101][0102]
其中,bj(o)为隐藏状态j下第g个单高斯模型观察到的观测向量为o的概率;c
jg
表示混合权重,即隐状态j下第g个单高斯模型的权重,同时也满足g为隐状态的时高斯分量的数目;p(o,μ
jg
,u
jg
)表示的是高斯概率密度函数;μ
jg
表示的是隐状态的第g个特征变量的均值向量;u
jg
表示的是隐状态的第g个特征变量的协方差矩阵;n为隐藏状态个数。
[0103]
gmm-hmm的模型参数λg可以表示为:
[0104]
λg={π,a,c,μ,u}
[0105]
π=(πi)
[0106]
a=[a
ij
]n×n[0107]aij
=p(q
t 1
=sj|q
t
=si)
[0108]
c=[c
jg
]n×g[0109]
μ=(μj)
[0110]
u=(uj)
[0111]
其中,π为起始状态概率向量,πi表示初始时刻处于状态si的概率,状态变量分别为危险跟驰状态和安全跟驰状态,π是一个二维向量;a为状态转移概率矩阵,a
ij
表示q
t
时刻隐状态为si的情况下,q
t 1
时刻状态为sj的概率,n=2,所以a是一个2
×
2的矩阵;c为危险跟驰状态和安全跟驰状态下混合高斯模型的分布权重系数矩阵,μ是m个特征变量的均值向量的
集合;u是n
×
g个特征变量的协方差矩阵的集合。
[0112]
(2)模型求解,实现跟驰状态识别。使用前向-后向算法降低计算复杂度并利用baum-welch算法进行含隐状态的参数学习如图2所示,以一种交通服务水平下的模型训练、识别为例,具体过程如下:
[0113]
a.确定初始参数:本发明中隐状态为安全跟驰状态和危险跟驰状态,所以n取值为2。由于单高斯分布已经可以很好地描述大多数情况下的概率分布情况,因此将两个隐马尔可夫模型的m值均设为1,相应地,高斯分布权重系数c也设为1。一般情况下,π和a的初值选取对模型的影响不大,采用随机数生成的方法,分别给两个模型的π和a设定初值。单高斯分布的均值μ和协方差矩阵u的初值通过抽取数据集中的部分样本估计得到;
[0114]
b.取训练集中的观测序列输入gmm-hmm模型,利用前向-后向算法,计算出前向概率和后向概率;
[0115]
c.通过baum-welch算法进行模型参数重估,更新模型参数λg;
[0116]
d.再次利用前向-后向算法,计算隐马尔可夫模型输出的似然概率,若概率增加,则需要重复步骤b和c,直到参数逐渐收敛不变,保存安全跟驰的识别模型参数λ
g1
、危险跟驰的识别模型参数λ
g2
。
[0117]
经过反复迭代,最终获得危险跟驰以及安全跟驰两个高斯混合隐马尔可夫模型的似然概率,通过对比获得识别结果,由此实现危险跟驰行为的准确识别。
[0118]
以上虽然描述了本发明的具体实施方法,但是本领域的技术人员应当理解,这些仅是举例说明,在不背离本发明原理和实现的前提下,可以对这些实施方案做出多种变更或修改,因此,本发明的保护范围由所附权利要求书限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。