1.本技术涉及一种防污染技术领域,尤其涉及一种尾气分析装置及方法。
背景技术:
2.2022年船舶排放碳氢化合物(hc)、氮氧化物(nox)、颗粒物(pm)分别占各自总排放量的20%、30%、25%。国家早在2013年就将船舶排放污染控制纳入行动计划,但一直到现在也没有很好地监管手段。
3.现有技术采用光谱法测量尾气中的so2和co2的浓度,从而通过计算可以得到燃油的含硫量。该方法在实际操作中存在如下问题:1、船舶尾气中的成分复杂多样,包含了大量的有机气体,极易出现互相干扰的情况。
4.2、船舶排出的尾气具有高温高湿特性,容易出现so2结晶影响硫含量的准确测量。
5.针对现有技术存在的上述问题,本技术提出了一种解决上述问题的技术方案。
技术实现要素:
6.为了克服相关技术中存在的问题,本技术提供一种尾气分析装置及方法。
7.根据本技术实施例的第一方面,提供一种尾气分析装置,包括:采样泵,用于采集船舶尾气;气体分析单元,用于对所述船舶尾气进行分析;预处理单元,用于控制所述船舶尾气的温度和湿度;温湿度传感单元,用于检测经过所述预处理单元处理后的船舶尾气的温度和湿度;控制单元,当上述温湿度传感单元检测到经过所述预处理单元处理后的船舶尾气的温度大于温度预设阈值和/或船舶尾气的湿度大于湿度预设阈值时,所述控制单元通过模糊自适应pid算法控制所述预处理单元的进气流量和/或制冷功率,使得所述预处理单元处理后的船舶尾气的温度低于所述温度预设阈值且湿度低于所述湿度预设阈值;当所述船舶尾气的温度低于所述温度预设阈值且湿度低于所述湿度预设阈值时,所述气体分析单元对所述船舶尾气进行分析。
8.进一步的,所述气体分析单元为高温伴热的光谱分析模块,采用光谱法测量船舶尾气中的so2和co2的浓度。
9.进一步的,所述船舶尾气中的各个种类气体浓度通过如下公式计算获得:式中,v表示实时信号,v0表示零气信号,b(q,t) 表示流量和温度补偿矩阵,k表示标定系数,表示任一种类型的气体浓度。
10.进一步的,所述控制单元通过如下公式计算获得燃油的含硫量:式中,m(s)表示燃油中所含硫的质量,m(fuel)表示燃油中燃料的质量,表示船舶尾气中实际含有的so2的浓度,表示空气中本身含有的so2的浓度,表示船舶尾气中实际含有的co2的浓度,表示空气中本身含有的co2的浓度。
11.进一步的,所述预处理单元包括:颗粒物处理模块,用于处理所述采样烟气中的颗粒物;有机物处理模块,用于处理所述采样烟气中的有机物;水处理模块,用于控制所述船舶尾气的温度和湿度,所述水处理模块为变频压缩机或半导体制冷器。
12.进一步的,所述控制单元通过模糊自适应pid算法控制所述水处理模块的进气流量和所述水处理模块的制冷功率。
13.所述控制单元包括:接收模块,所述接收模块用于接收所述温湿度传感单元实时检测获得的船舶尾气的温度和湿度;数据处理模块,用于设定模糊pid自适应控制的设定温度和湿度,并采用卡尔曼滤波算法对模糊pid自适应控制的设定温度和湿度、与温度传感器和湿度传感器的实时测量值进行融合,获取阶段性目标温度和阶段性目标湿度;所述数据处理模块根据阶段性目标温度和设定温度,阶段性目标湿度和设定湿度,分别计算温度误差和湿度误差的变化率,并将温度误差变化率和湿度误差变化率作为模糊输入量,采用模糊pid自适应控制方法得到所述水处理模块的制冷功率的调节量和所述水处理模块的进气流量的调节量,并根据模糊控制规则,自动调节所述水处理模块的制冷功率pid控制参数和所述水处理模块的进气流量pid控制参数。
14.进一步的,当所述水处理模块为所述变频压缩机时,所述控制单元通过控制所述变频压缩机的风机电压和排气流量来控制所述水处理模块的制冷功率和所述水处理模块的进气流量;所述变频压缩机的风机电压表示如下:排气流量的调节量由下式表示:
式中,、、、为权重因子,表示第次的温度误差,表示第次的湿度误差,为风机电压的pid比例调节系数,为风机电压的pid积分调节系数,为风机电压的pid微分调节系数,为排气流量的调节量的pid比例调节系数,为排气流量的调节量的pid积分调节系数,为排气流量的调节量的pid微分调节系数。
15.进一步的,所述水处理模块的制冷功率pid控制参数通过如下公式实时优化获得:进一步的,所述水处理模块的制冷功率pid控制参数通过如下公式实时优化获得:进一步的,所述水处理模块的制冷功率pid控制参数通过如下公式实时优化获得:式中,、、、为权重因子,表示pid的比例调节系数,表示pid的积分调节系数,表示微分调节系数,表示第次的温度误差,表示第次的湿度误差,表示当船舶尾气处理达标时经过预处理的次数,f1、f2、f3表示基于模糊控制规则建立的二元连续函数;所述水处理模块的进气流量pid控制参数基于模糊控制规则,通过如下公式实时优化获得:优化获得:优化获得:式中,、、为系数,、、表示基于模糊控制规则建立的二元连续函数, 为进气流量的pid比例调节系数,为进气流量的pid积分调节系数,为进气流量的微分调节系数,表示第次的温度误差,表示第次的湿度误差,表示船舶尾气处理达标时经过预处理的次数。
16.本技术还提供一种尾气分析方法,所述方法包括如下步骤:采集船舶尾气;对所述船舶尾气进行预处理,控制所述船舶尾气的温度和湿度;检测经过预处理后的所述船舶尾气的温度和湿度;
当检测到经过预处理后的所述船舶尾气的温度大于温度预设阀值和/或船舶尾气的湿度大于湿度预设阀值,通过模糊自适应pid算法控制所述船舶尾气的进气流量和/或对所述船舶尾气的制冷功率,使得经过预处理后的船舶尾气的温度低于所述温度预设阀值且湿度低于所述湿度预设阀值;当所述船舶尾气的温度低于所述温度预设阀值且湿度低于所述湿度预设阀值时,对所述船舶尾气进行分析。
17.进一步的,通过所述模糊自适应pid算法控制所述船舶尾气的进气流量和/或对所述船舶尾气的制冷功率包括如下步骤:实时检测获得的船舶尾气的温度和湿度;设定模糊pid自适应控制的设定温度和湿度;采用卡尔曼滤波算法对模糊pid自适应的设定温度和湿度、与温度传感器和湿度传感器的实时测量值进行数据融合,获取阶段性目标温度和阶段性目标湿度;根据阶段性目标温度和设定温度,阶段性目标湿度和设定湿度,分别计算温度误差和湿度误差的变化率,并将温度误差变化率和湿度误差变化率作为模糊输入量;采用模糊pid自适应控制方法得到对所述船舶尾气的制冷功率的调节量和对所述船舶尾气的进气流量的调节量,并根据模糊控制规则,自动调节制冷功率pid控制参数和进气流量pid控制参数。
18.本技术提供的尾气分析装置,可以包括以下有益效果:本技术提出的尾气分析装置中设有预处理单元,该预处理单元包括:颗粒物处理模块、有机物处理模块及水处理模块。其中,该尾气分析装置的水处理模块可以为变频压缩机和/或半导体制冷器。
19.该船舶尾气中的成分复杂多样,包含了大量的有机气体,极易出现互相干扰的情况,因此,该尾气分析装置的预处理单元设有颗粒物处理模块和有机物处理模块,用于除去船舶尾气中的颗粒物和有机物,使得硫含量的测量结果更为准确。
20.该船舶尾气还具有高温高湿特性,容易出现so2结晶,导致硫含量的损失,影响硫含量的准确测量,因此,在预处理单元还需要对该船舶尾气进行水处理,使得船舶尾气含有的水蒸气液化,从而达到降温除湿的效果。
21.另外,在该尾气分析装置中还用到了模糊自适应pid算法控制方法,可以同时控制温度和湿度两个变量,使得船舶尾气的温度和湿度达到预处理标准。
附图说明
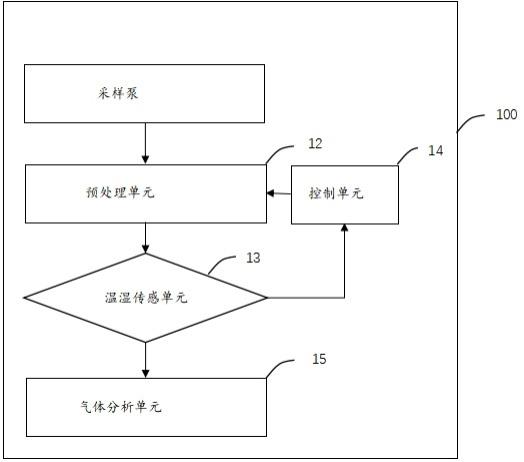
22.图1为尾气分析装置示意图。
23.图2为预处理示意图。
24.图3为控制单元示意图。
25.图4为模糊自适应pid算法控制方法示意图。
26.图5为尾气分析方法示意图。
具体实施方式
27.以下将结合附图所示的具体实施方式对本技术进行详细描述,但这些实施方式并
不限制本技术,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本技术的保护范围内。
28.如图1所示,本技术提供一种尾气分析装置100,包括:采样泵11、预处理单元12、温湿度传感单元13、控制单元14、气体分析单元15。
29.其中,采样泵11用于采集船舶尾气。
30.预处理单元12用于控制船舶尾气的温度和湿度。
31.温湿度传感单元13用于检测经过预处理单元12处理后的船舶尾气的温度和湿度。
32.气体分析单元15用于对船舶尾气进行分析。
33.控制单元14,当温湿度传感单元13检测到经过预处理单元12处理后的船舶尾气的温度高于温度预设阈值和/或船舶尾气的湿度高于湿度预设阈值时,控制单元14通过模糊自适应pid算法控制预处理单元的进气流量和/或制冷功率,使得预处理单元12处理后的船舶尾气的温度低于所述温度预设阈值且湿度低于所述湿度预设阈值。
34.当船舶尾气的温度低于温度预设阈值且湿度低于湿度预设阈值时,气体分析单元15对船舶尾气进行分析。
35.作为一种可选的实现方式,采样泵11用于实时采集待检测的船舶尾气。
36.作为一种可选的实现方式,该尾气分析装置设有预处理单元12,用于对船舶尾气进行预处理。
37.如图2所示,预处理单元12包括:颗粒物处理模块121、有机物处理模块122、水处理模块123。
38.颗粒物处理模块121用于处理船舶尾气中的颗粒物。
39.有机物处理模块122用于处理船舶尾气中的有机物。
40.水处理模块123用于控制船舶尾气的温度和湿度。
41.其中,船舶尾气中含有大量的颗粒物(pm),颗粒物对大气环境影响巨大;并且船舶尾气的成分复杂多样,包含大量有机气体,极易出现互相干扰的情况,影响硫含量的准确测量结果。
42.作为一种可选的实现方式,本技术实施例提供的预处理单元中设有颗粒物处理模块121和有机物处理模块122,通过颗粒物处理模块121除去船舶尾气中的颗粒物,并通过有机物处理模块122除去船舶尾气中的有机物,以使得硫含量的测量结果更为准确。
43.此外,预处理单元还通过水处理模块使船舶尾气中含有的水蒸气液化,通过降温除湿的手段控制船舶尾气的温度和湿度,避免船舶尾气在高温高湿的条件下发生so2的结晶,导致硫含量的流失,影响硫含量的准确测量。
44.作为一种可选的实现方式,当温湿度传感器检测到的经过预处理单元12处理后的船舶尾气温度高于温度预设阀值和/或该船舶尾气的湿度大于湿度预设阀值时,通过控制单元14采用模糊自适应pid算法调整控制预处理单元的进气流量和制冷功率,使得船舶尾气的温度低于温度预设阀值,且湿度低于湿度预设阀值。
45.例如,通过减少预处理单元12的进气流量和/或提高预处理单元的制冷功率,延长制冷时间,控制船舶尾气的温度和除水效率,以使得船舶尾气的温度低于温度预设阀值,且湿度低于湿度预设阀值,达到从而达到控制船舶尾气的温度和湿度的目的。
46.经过预处理后的船舶尾气进入温湿度传感单元13,温湿度传感器检测该船舶尾气
的温度和湿度。若温湿度传感器实时检测到的船舶尾气的温度高于该船舶尾气的温度预设阀值和/或湿度高于该船舶尾气的湿度预设阀值时,通过控制单元14再次进入预处理单元12进行预处理,直至该船舶尾气的温度低于温度预设阀值和/或该船舶尾气的湿度低于湿度预设阀值,该船舶尾气进入气体分析单元15进行气体分析。
47.作为一种可选的实现方式,气体分析单元15用于分析船舶尾气的各气体成分。该气体分析单元15可以分析出各种类型的气体,例如,二氧化碳(co2)、二氧化硫(so2)等。
48.作为一种可选的实现方式,气体分析单元15可以为高温伴热的光谱分析模块,采用光谱法可以测量出各种类型的气体浓度。例如,采用光谱法可以测量船舶尾气中的so2和co2的浓度。
49.作为一种可选的实现方式,该船舶尾气中可能含有各个种类的气体,在使用尾气分析装置100时,经过预处理后温度和湿度均达标的船舶尾气进入气体分析单元15,并采用光谱法测量出船舶尾气中so2和co2的浓度。其中,所述船舶尾气中的各个种类气体浓度通过以下公式计算获得:式中,v表示实时信号,v0表示零气信号,b(q,t) 表示流量和温度补偿矩阵,表示任一种类型的气体浓度,例如,表示co2的浓度,表示so2的浓度,k表示标定系数。
50.作为一种可选的实现方式,燃油的含硫量是由控制单元14通过如下公式计算得到:式中,m(s)表示燃油中所含硫的质量,m(fuel)表示燃油中燃料的质量,表示船舶尾气中实际含有的so2的浓度,表示空气中本身含有的so2的浓度,表示船舶尾气中实际含有的co2的浓度,表示空气中本身含有的co2的浓度。
51.作为一种可选的实现方式,本技术提供的尾气分析装置100中的水处理模块123可以为变频压缩机或半导体制冷器。
52.其中,变频压缩机通过控制其风机电压和排气流量来控制水处理模块123的制冷功率和该水处理模块的进气流量。半导体制冷器通过控制其输出供电电压和排气流量来控制水处理模块的制冷功率和该水处理模块123的进气流量。
53.如图3所示,作为一种可选的实现方式,控制单元14通过模糊自适应pid算法控制该水处理模块123的进气流量和该水处理模块123的制冷功率。控制单元14包括:接收模块
141、数据处理模块142。
54.其中,接收模块141用于接收温湿度传感单元13实时检测获得的船舶尾气的温度和湿度。
55.数据处理模块,用于设定模糊pid自适应控制的温度预设阀值和湿度预设阀值,并采用卡尔曼滤波算法对模糊pid自适应控制的温度预设阀值和湿度预设阀值、与温度传感器和湿度传感器的实时测量值进行融合,获取阶段性目标温度和阶段性目标湿度;该数据处理模块根据阶段性目标温度和温度预设阀值,阶段性目标湿度和湿度预设阀值,分别计算温度误差和湿度误差的变化率,并将温度误差变化率和湿度误差变化率作为模糊输入量,采用模糊pid自适应控制方法得到水处理模块的制冷功率的调节量和水处理模块的进气流量的调节量,并根据模糊控制规则,自动调节水处理模块的制冷功率pid控制参数和水处理模块的进气流量pid控制参数。
56.其中,温度误差为阶段性目标温度与温度预设阀值之间的差值,湿度误差为阶段性目标湿度与湿度预设阀值之间的差值。温度误差的变化率则为每一次温度误差之间的差值,湿度误差的变化率为每一次湿度误差之间的差值。由于通过风机电压控制水处理模块123的制冷功率,因此可以以来表示水处理模块123的制冷功率的调节量,水处理模块的进气流量的调节量则为。
57.如图4所示,以温度预设阀值t
in
与湿度预设阀值w
in
作为输入量,通过模糊自适应pid算法控制预处理单元12的排气流量和制冷功率来控制船舶尾气的温度与湿度。温度卡尔曼滤波算法将温度预设阀值t
in
与温度传感器实时检测到的温度进行数据融合,湿度卡尔曼滤波算法将湿度预设阀值w
in
与湿度传感器实时检测到的湿度进行数据融合后,获得第一阶段的目标温度t
out
和第一阶段的目标湿度w
out
。
58.基于第一阶段的目标温度和第一阶段的目标湿度,并根据模糊规则,调节pid控制的三个参数,并检测经过pid控制后的第一阶段实际温度和第一阶段实际湿度。
59.若第一阶段实际温度还高于温度预设阀值,且第一阶段实际湿度还高于湿度预设阀值时,通过温度卡尔曼滤波算法将温度预设阀值t
in
与第一阶段实际温度进行数据融合,并且通过湿度卡尔曼滤波算法将湿度预设阀值w
in
与第一行阶段实际湿度进行数据融合,以获得第二阶段的目标温度和第二阶段的目标湿度。
60.基于第二阶段的目标温度和第二阶段的目标湿度,并根据模糊规则,调节pid控制的三个参数,并检测经过pid控制后的第二阶段实际温度和第二阶段实际湿度。
61.若第二阶段实际温度还高于温度预设阀值,第二阶段的实际湿度还高于湿度预设阀值时,温度卡尔曼滤波算法将温度预设阀值与第二阶段实际温度进行数据融合,湿度卡尔曼滤波算法将湿度预设阀值与第二阶段实际湿度进行数据融合,以得到下一阶段的目标温度和目标湿度。重复上述处理步骤,直至获得的阶段性目标温度低于温度预设阀值,且阶段性目标湿度低于湿度预设阀值时,船舶尾气进入气体分析单元15进行气体分析。
62.其中,根据温度预设阀值t
in
和阶段性目标温度t
out
计算出温度的误差值
△
t
,同样,根据湿度预设阀值w
in
和阶段性目标湿度w
out
可以计算出湿度的误差值
△w。
63.例如,pid控制的温度预设阀值为5℃,湿度预设阀值为3%,温度传感器实时检测到的温度为30℃,湿度传感器实时检测到的湿度为20%,通过卡尔曼滤波算法将5℃与30
℃、3%和20%进行数据融合,获得第一阶段的目标温度可以为25℃,第一阶段的目标湿度可以为20%。由于温度为25℃及湿度为20%没有达到预处理标准,根据模糊规则,调节pid控制的三个参数,并检测可以得第二阶段的目标温度为15℃,第二阶段的目标湿度为10%。在该例子中,温度预设阀值为5℃,湿度预设阀值为3%,第一阶段的温度误差为20℃,第一阶段的湿度误差为 1 7%,第二阶段的温度误差为10℃,第二阶段的湿度误差为7%,从而可得知温度误差的变化为10℃,湿度误差的变化为10%。
64.作为一种可选的实现方式,水处理模块123可以为变频压缩机和半导体制冷器。当水处理模块123为变频压缩机时,控制单元14通过控制变频压缩机的风机电压和排气流量来控制该水处理模块123的制冷功率和该水处理模块123的进气流量。
65.作为一种可选的实现方式,根据温度误差(
△
t
=t
out-t
in
)和湿度误差(
△w=w
out-w
in ) 的变化率作为模糊输入量,采用模糊pid自适应控制方法得到变频压缩机的风机电压及排气流量的调节量。
66.其中,变频压缩机的风机电压表示如下: 排气流量的调节量由下式表示:式中,、、、为权重因子,该权重因子可由大数据样本实验获得,表示第次的温度误差,表示第次的湿度误差,表示船舶尾气处理达标后需要进行预处理的次数,为风机电压的pid比例调节系数,为风机电压的pid积分调节系数,为风机电压的pid微分调节系数,为排气流量的调节量的pid比例调节系数,为排气流量的调节量的pid积分调节系数,为排气流量的调节量的pid微分调节系数。
67.作为一种可选的实现方式,根据模糊控制规则,自动调整pid的三个参数,并实时优化。水处理模块123的制冷功率pid控制参数通过如下公式实时优化获得:优化。水处理模块123的制冷功率pid控制参数通过如下公式实时优化获得:优化。水处理模块123的制冷功率pid控制参数通过如下公式实时优化获得:
式中,表示pid的比例调节系数,表示pid的积分调节系数,表示微分调节系数,表示第次的温度误差,表示第次的湿度误差,、为系数,表示船舶尾气处理达标时需要经过预处理的次数,f1、f2、f3表示基于模糊控制规则建立的二元连续函数。
68.该水处理模块123的进气流量pid控制参数基于模糊控制规则,通过如下公式实时优化获得:优化获得:优化获得:式中,表示第次的温度误差,表示第次的湿度误差, 、、为系数,、、表示基于模糊控制规则建立的二元连续函数,表示船舶尾气处理达标后需要进行预处理的次数。
69.作为一种可选的实现方式,当水处理模块123为所述半导体制冷器时,控制单元14通过控制该半导体制冷器的输出供电电压和排气流量来控制该水处理模块123的制冷功率和该水处理模块123的进气流量。
70.根据温度误差(
△
t
=t
out-t
in
)和湿度误差(
△w=w
out-w
in ) 的变化率作为模糊输入量,采用模糊pid自适应控制方法得到半导体制冷器的供电电压及排气流量的调节量。
71.所述半导体制冷器的输出供电电压表示如下:排气流量的调节量由下式表示:式中,、、、为权重因子。其中,表示第次的温度误差,表示第次的湿度误差,表示船舶尾气处理达标后需要进行预处理的次数,为输出供电电压的pid比例调节系数,为输出供电电压的pid积分调节系数,为输出供电电压的pid微分调节系数,为排气流量的调节量的pid比例调节系数,为排气流量的调节量的pid积
分调节系数,为排气流量的调节量的pid微分调节系数。
72.作为一种可选的实现方式,水处理模块123的制冷功率pid控制参数通过如下公式实时优化获得:实时优化获得:实时优化获得:式中,表示第次的温度误差,表示第次的湿度误差,、为系数,f1、f2、f3表示基于模糊控制规则建立的二元连续函数。,表示船舶尾气处理达标后需要进行预处理的次数。下该水处理模块的进气流量pid控制参数基于模糊控制规则,通过如公式实时优化获得:获得:获得:式中,表示第次的温度误差,表示第次的湿度误差,、、为系数,、、表示基于模糊控制规则建立的二元连续函数,表示船舶尾气处理达标后需要进行预处理的次数。
73.如图5所示,作为一种可选的实现方式,本技术还提供一种尾气分析方法,包括:实时采集船舶尾气。
74.对船舶尾气进行预处理,控制所述船舶尾气的温度和湿度。
75.检测经过预处理后的船舶尾气的温度和湿度。
76.当检测到经过预处理后的船舶尾气的温度大于温度预设阀值和/或船舶尾气的湿度大于湿度预设阀值,通过模糊自适应pid算法控制船舶尾气的进气流量和/或对船舶尾气的制冷功率,使得经过预处理后的船舶尾气的温度低于温度预设阀值且湿度低于湿度预设阀值;当船舶尾气的温度低于温度预设阀值且湿度低于湿度预设阀值时,对船舶尾气进行分析。
77.最后对测量信号进行流量和温度补偿,计算船舶尾气的浓度,并计算燃油中的硫含量的浓度。
78.作为一种可选的实现方式,通过模糊自适应pid算法控制船舶尾气的进气流量和/或对船舶尾气的制冷功率包括如下步骤:温度传感器和湿度传感器实时检测获得船舶尾气的温度和湿度。设定模糊pid自适应控制的温度预设阀值和湿度预设阀值。
79.采用卡尔曼滤波算法对模糊pid自适应的温度预设阀值和湿度预设阀值、与温度传感器和湿度传感器的实时测量值进行数据融合,获取阶段性目标温度和阶段性目标湿度。
80.根据阶段性目标温度和温度预设阀值,阶段性目标湿度和湿度预设阀值,分别计算温度误差和湿度误差的变化率,并将温度误差变化率和湿度误差变化率作为模糊输入量。
81.采用模糊pid自适应控制方法得到对船舶尾气的制冷功率的调节量和对船舶尾气的进气流量的调节量,并根据模糊控制规则,自动调节制冷功率pid控制参数和进气流量pid控制参数。
82.综上所述,本技术提供一种尾气分析装置,通过预处理单元对待测烟气进行预处理,除去烟气中的颗粒物和有机物,从而避免颗粒物和有机物对硫含量测量结果的影响。同时,本技术提供的装置还使用了模糊自适应pid算法控制方法对船舶尾气进行降温除湿处理,避免船舶尾气因高温高湿特性出现so2结晶导致硫含量的损失,提高了硫含量测量的准确性。
83.以上所揭露的仅为本技术的较佳实施例而已,然其并非用以限定本技术之权利范围,本领域普通技术人员可以理解:在不脱离本技术及所附的权利要求的精神和范围内,改变、修饰、替代、组合、简化,均应为等效的置换方式,仍属于申请所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。