1.本发明涉及水下机器人辅助装置,具体是涉及一种浮力调节装置的测试装置及其测试方法。
背景技术:
2.水下机器人在海洋、湖泊、水库等水域得到广泛应用,为水下事业发展做出了重要贡献,但不同水域环境需要水下机器人调节不同大小的浮力,浮力调节准确性决定着水下机器人水下运动稳定性和安全性,因此准确测量浮力调节装置产生的浮力及浮力矩对于水下机器人能否实现高效作业,起着至关重要的作用。
3.现有技术中,如专利申请号为202011492076.2,名称为“一种模拟水下压力环境的浮力调节机构测”的中国专利,公开了一种模拟水下环境的浮力调节测试装置,其将压力表和溢流阀串联在油路中,通过调节溢流阀改变油路中的压力大小,以测试浮力驱动装置的效率,但该测试装置不能够调整浮力调节装置的姿态角度,无法测量浮力调节装置姿态角度变化时的工作情况。专利申请号为202110782316.0,名称为“一种水陆两栖飞机浮筒检测装置及其检测方法”的中国专利,公开了一种水陆两栖飞机浮筒检测装置及其检测方法,其通过水箱和下压机构,能够获取飞机浮筒在对应吃水深度时的浮力大小,但该浮力测试装置只能测试浮力的大小,而不能测试浮力矩的大小,也不能测量浮力、浮力矩随浮力调节装置姿态角度的变化规律。专利号为zl202010799398.5,名称为“一种双向容积式浮力调节装置及其测试装置与测试方法”的中国专利,采用两套框架嵌套结构,分别构成浮力定平台、力矩定平台,以测量浮力调节装置产生的浮力和浮力矩,但该专利只能测量浮力调节装置在水平时产生的整体浮力以及俯仰浮力矩,难以调节浮力调节装置的姿态角度,无法测量浮力调节装置姿态角度变化时的工作情况。
技术实现要素:
4.发明目的:针对以上缺点,本发明提供一种对浮力调节装置姿态角度变化时浮力调节装置工作产生的浮力及浮力矩进行测量的测试装置。
5.本发明还提供一种测试装置的测试方法。
6.技术方案:为解决上述问题,本发明采用一种浮力调节装置的测试装置,包括测试框架、设置于测试框架内的定平台、用于固定连接浮力调节装置的动平台、连接定平台与动平台的调节装置、测试水池,所述定平台与测试框架之间设置六维力传感器,六维力传感器用于测量定平台受到的力及力矩,所述动平台位于定平台下方,所述调节装置用于调节动平台相对于定平台的高度及倾斜角度,并将动平台受到的力传导至定平台,所述测试水池位于动平台下方,调节装置调节动平台移入和移出测试水池。
7.进一步的,所述调节装置包括若干竖直设置的推杆,推杆两端分别与定平台和动平台连接,推杆伸缩调节动平台相对于定平台的高度及倾斜角度。所述调节装置包括竖直设置的第一推杆、第二推杆和第三推杆,所述第一推杆一端与定平台固定连接,另一端与动
平台铰接;所述第二推杆和第三推杆两端分别与定平台和动平台铰接,所述第一推杆、第二推杆和第三推杆与定平台连接的三个连接点不共线。所述第一推杆和第二推杆与定平台连接的两个连接点所在直线垂直于第一推杆和第三推杆与定平台连接的三个连接点两个连接点所在直线。
8.进一步的,所述第一推杆、第二推杆和第三推杆上均设置拉伸位移传感器,拉伸位移传感器用于分别反馈第一推杆、第二推杆和第三推杆的伸长量。所述动平台上设置倾角仪,倾角仪用于反馈动平台的角度变化。
9.进一步的,所述测试框架设置有驱动装置,所述驱动装置用于水平驱动定平台,驱动装置用于将定平台移至测试水池正上方或移出测试水池正上方。所述驱动装置包括固定设置于测试框架上的丝杆驱动电机、水平设置的丝杆、与丝杆螺纹连接的滑动板,所述六维力传感器与滑动板固定连接,所述丝杆驱动电机驱动丝杆转动,丝杆转动带动滑动板移动,滑动板移动带动六维力传感器移动,从而带动定平台移动。
10.本发明还采用一种浮力调节装置的测试装置的测试方法,包括以下步骤:
11.步骤1:将浮力调节装置与动平台固定连接,并将浮力调节装置调节至测试水池内且浸没于水中,同时调节动平台与定平台平行,记录此时六维力传感器测量的力与力矩;
12.步骤2:浮力调节装置进行浮力调节,并记录六维力传感器的示数,计算得到浮力调节装置产生的浮力和浮力矩;
13.步骤3:调节动平台相对于定平台倾斜;
14.步骤4:浮力调节装置进行浮力调节,并记录六维力传感器的示数,计算得到浮力调节装置产生的浮力和浮力矩;
15.步骤5:改变动平台相对于定平台的倾斜角度与倾斜方向,再次进行浮力调节装置进行浮力调节,得到浮力调节装置不同姿态下产生的浮力和浮力矩。
16.进一步的,所述步骤3中通过调节动平台不同点的高度得到要测试的动平台相对于定平台的倾斜角度,具体包括以下步骤:
17.步骤31:在动平台上建立动坐标系a
1-xyz,在定平台上建立定坐标系b
1-xyz;
18.步骤32:将动坐标系a
1-xyz中的点转换至定坐标系b
1-xyz中,即动坐标系内一点api在定坐标系中的坐标为bpi,且bpi=rapi,其中,表示r动坐标系相对于定坐标系的旋转矩阵;根据倾斜角度,得到动坐标系内点在定坐标系中的坐标;
19.步骤33:根据得到的定坐标系中的坐标计算得到对应动平台该点相对定平台的距离;
20.步骤34:调节装置根据计算得到的距离调节动平台对应的点。
21.有益效果:本发明相对于现有技术,其显著优点是通过调节装置调节动平台,从而调整浮力调节装置的位姿,实现浮力调节装置在不同位姿下进行浮力调节测试,得到浮力调节装置进行浮力调节测试时产生的实际的浮力及浮力矩,相较于一般的浮力测试装置,测试功能更加多样化,不仅能够测试浮力及浮力矩的大小,而且能够测量浮力、浮力矩随浮力调节装置俯仰、横滚等姿态角度的变化规律。测试框架由若干测试支架通过角件固定连接,组装容易,测试平台倒置布置,即定平台在上、动平台在下,推杆的电机驱动端在上,伸出杆端在下无需防水措施,也便于被测装置的安装与测试,可靠性高,稳定性强,测试操作简单。利用多个传感器对推杆伸缩量及动平台角度变化量进行闭环控制,使浮力调节装置
能够准确达到预设位姿,测试效率更好,测试精度更高。
附图说明
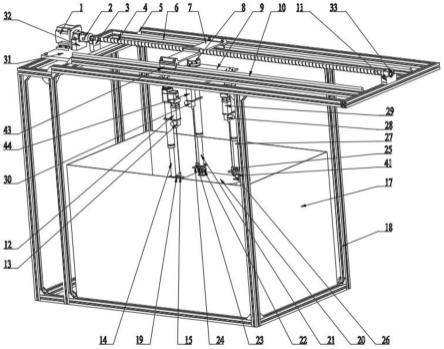
22.图1是本发明测试装置的整体结构示意图;
23.图2是本发明测试装置的整体结构俯视图;
24.图3是本发明测试装置的测试前位置图;
25.图4是本发明测试装置的测试时位置图;
26.图5是本发明测试装置中测试平台连接浮力调节装置的结构示意图;
27.图6是本发明中动平台和定平台平行时测试浮力调节装置调节情况一的结构示意图;
28.图7是本发明中动平台和定平台平行时测试浮力调节装置调节情况二的结构示意图;
29.图8是本发明中动平台和定平台平行时测试浮力调节装置调节情况三的结构示意图;
30.图9是本发明动平台和定平台建立的两个坐标系的简图;
31.图10是本发明动平台位姿变换后两个坐标系的简图;
32.图11是本发明中动平台绕定平台y轴转动一定倾角时测试浮力调节装置的结构示意图;
33.图12是本发明中动平台绕定平台x轴转动一定倾角时测试浮力调节装置的结构示意图;
34.图13是本发明中动平台绕定平台x、y轴同时转动一定倾角时测试浮力调节装置的运动状态简图。
具体实施方式
35.实施例1
36.如图1至图4所示,测试装置主要包括测试框架18、测试平台、浮力调节装置及测试水池17等,测试框架18由若干测试支架通过角件固定连接,组装容易,测试水池17置于测试框架18内,测试框架18上固定设置驱动装置,驱动装置用于水平驱动测试平台,驱动装置将测试平台移至测试水池17正上方或移出测试水池17正上方,便于浮力调节装置的安装。驱动装置包括固定设置于测试框架18上的丝杆驱动电机1、水平设置的丝杆4、与丝杆4螺纹连接的滑动板7,丝杠驱动电机1通过螺栓安装在电机固定板31上,电机固定板31通过螺栓固定在测试框架18上端,丝杠驱动电机1的电机输出轴通过联轴器2与丝杆4一端固定连接,联轴器2与丝杠驱动电机1之间安装有第一轴承座32,联轴器2与丝杠4之间安装有第二轴承座3,丝杆4末端通过第三轴承座11固定支撑,第三轴承座11内设置轴承33,丝杆4两侧分别设置第一滑轨6和第二滑轨10,第一滑轨6和第二滑轨10均平行于丝杆4,滑动板7两端通过螺栓安装有丝杠滑块43,两个丝杠滑块43分别套在第一滑轨6和第二滑轨10上,六维力传感器8通过螺栓安装在滑动板7下方。
37.如图5所示,测试平台主要包括定平台9、动平台20。定平台9和动平台20之间通过调节装置连接,动平台20下端用于固定连接浮力调节装置,调节装置包括若干竖直设置的
推杆,推杆两端分别与定平台9和动平台20连接,推杆伸缩调节动平台20相对于定平台9的高度及倾斜角度,推杆的数量及安装位置不限,只要推杆可以调节动平台20相对于定平台9产生各个方向的倾角即可。为了减小计算量,本实施例中的调节装置以竖直设置的三个推杆为例,分别为第一推杆21、第二推杆14和第三推杆27,且第一推杆21和第二推杆14与定平台9连接的两个连接点所在直线垂直于第一推杆21和第三推杆27与定平台9连接的三个连接点两个连接点所在直线,第一推杆21、第二推杆14和第三推杆27的驱动电机均位于上端,伸出杆位于下端,在对浮力调节装置进行测试时,伸出杆端无需防水措施,便于被测装置的安装与测试,可靠性高。
38.定平台9通过螺栓安装在六维力传感器8的下方,第一推杆21上端通过螺栓与第二连接座45下端固定连接,第二连接座45上端通过螺栓安装在定平台9上,为了方便计算,第一推杆21和六维力传感器8设置于同一轴线上,第一推杆21下端通过螺栓与第一万向节22上端连接,第一万向节22下端通过螺栓与动平台20连接,第一连接板24通过螺栓连接于第一推杆21下端和第一万向节22上端之间,第一拉绳接头23通过螺栓与第一连接板24上端连接,第一拉绳传感器30通过螺栓与第一推杆电机44连接,第一拉绳传感器30可以测量第一推杆21的伸长量。第二万向节34上端通过螺栓安装在定平台9上,第二万向节34下端通过螺栓与第二推杆14上端连接,第二推杆14下端通过螺栓与第二球铰16上端连接,第二球铰16下端通过螺栓与动平台20连接,第二连接板19通过螺栓连接于第二推杆14下端与第二球铰16上端之间,第二拉绳接头15通过螺栓与第二连接板19连接,第二拉绳传感器13通过螺栓与第二推杆电机12连接,第二拉绳传感器13可以测量第二推杆14的伸长量。第三万向节35上端通过螺栓安装在定平台9上,第三万向节35下端通过螺栓与第三推杆27上端连接,第三推杆27下端通过螺栓与第三球铰41上端连接,第三球铰41下端通过螺栓与动平台20连接,第三连接板26通过螺栓连接于第三推杆27下端与第三球铰41上端之间,第三拉绳接头25通过螺栓与第三连接板26连接,第三拉绳传感器28通过螺栓与第三推杆电机29连接,第三拉绳传感器28可以测量第三推杆27的伸长量。本实施例中,为了方便的对测试装置进行说明,采用四向调节的浮力调节装置主要包括第一浮力调节模块40、第二浮力调节模块39、第三浮力调节模块38、第四浮力调节模块36,浮力调节装置通过螺栓安装在第一连接座37下端,第一连接座37上端通过螺栓与动平台20连接,且第一连接座37与浮力调节装置的浮心所在直线竖直延伸,且与第一推杆21的延伸线重合。
39.测试装置的工作过程如下:
40.丝杠驱动电机1驱动丝杠4将滑动板7移至测试水池17外,方便浮力调节装置的安装,将测试平台及浮力调节装置固定安装于滑动板7上,丝杠驱动电机1驱动丝杠4,带与动滑动板7固定连接的浮力调节装置移动至测试水池17中央。控制第一推杆21、第二推杆14、第三推杆27伸长相同长度将浮力调节装置浸没于测试水池17中,且测试平台满足浮力调节模块伸长到极限位置时与测试水池17不发生干涉。当需要测量浮力调节装置在水平或倾斜状态下实际产生的浮力和浮力矩时,控制第一推杆21、第二推杆14伸长或缩短,通过各个拉绳位移传感器和倾角仪42实时反馈各个推杆的伸长量变化和动平台20角度变化,从而实现测试平台的精确控制与测试,记录浮力调节装置变化前后的六维力传感器8读数,计算得到浮力调节装置产生的浮力δf
x
、δfy、δfz和浮力矩δm
x
、δmy、δm,z最后得出浮力调节装置实际产生的浮力和浮力矩。
41.实施例2
42.本实施例中一种浮力调节装置的测试装置的测试方法,包括以下步骤:
43.步骤1:丝杠驱动电机1驱动丝杠4,丝杠4带动滑动板7移动至测试水池17外,将测试平台安装在滑动板7上,并将浮力调节装置与动平台20固定连接,再用丝杠驱动电机1驱动丝杠4,使浮力调节装置移动至测试水池17中央的上方,控制第一推杆21、第二推杆14、第三推杆27伸长相同长度,即l1=l2=l3,将浮力调节装置调节至测试水池17内且浸没于水中,此时动平台20与定平台9平行,记录此时六维力传感器8测量的x、y、z轴上力的示数f
x0
、f
y0
、f
z0
和x、y、z轴上力矩的示数m
x0
、m
y0
、m
z0
作为初始值;
44.步骤2:浮力调节装置进行浮力调节,并记录六维力传感器8的示数,计算得到浮力调节装置产生的浮力和浮力矩;如图6至图8所示,本实施例中以包括四个浮力调节模块的四向浮力调节装置为例,四个浮力调节模块分别为第一浮力调节模块40、第二浮力调节模块39、第三浮力调节模块38、第四浮力调节模块36;第一推杆21、第一连接座37、浮力调节装置的中心线与六维力传感器8的z轴同轴线,浮力调节装置的浮心为o,第一万向节22中心距离浮心o的距离为x0,第一浮力调节模块40、第二浮力调节模块39、第三浮力调节模块38、第四浮力调节模块36的初始长度分别x1、x2、x3、x4,半径分别为r1、r2、r3、r4,可移动部分的重力分别为g1、g2、g3、g4。控制第一浮力调节模块40、第二浮力调节模块39、第三浮力调节模块38、第四浮力调节模块36分别伸长δx1、δx2、δx3、δx4进行浮力调节,记录此时六维力传感器8的x、y、z轴上力的示数f
x1
、f
y1
、f
z1
和x、y、z轴上力矩的示数m
x1
、m
y1
、m
z1
,则浮力调节装置产生的浮力δf
x
、δfy、δfz和浮力矩δm
x
、δmy、δmz如下:
[0045][0046]
改变δx1、δx2、δx3、δx4,测得浮力调节装置在各浮力调节模块不同伸长量情况下产生的浮力及浮力矩。
[0047]
步骤3:调节动平台(20)相对于定平台(9)倾斜;
[0048]
如图9所示,对测试平台进行简化,第一推杆21表示为{u1b1}链,第二推杆14表示为{u2b2s2},第三推杆27表示为{u3b3s3}链。第一万向节22、第二万向节34、第三万向节35的转动副表示为ui(i=1,2,3)副,中心分别为点a1和bi(i=2,3),第二球铰16和第三球铰41的转动副表示为s2副和s3副,中心分别为点a2和a3。各支链中的pi副为驱动副,各推杆a
ibi
长度为li(i=1,2,3)。在动平台20上建立动坐标系a
1-xyz,x轴和y轴正向分别沿a1a3和a1a2方向,z轴垂直于动平台20。在定平台9上建立定坐标系b
1-xyz,x轴和y轴正向沿b1b3和b1b2方向,z轴垂直于定平台9。
[0049]
将动坐标系a
1-xyz中的点转换至定坐标系b
1-xyz中,当定平台9和动平台20相互平行时,动平台20绕定平台9的转动即等效于动坐标系a
1-xyz绕定坐标系b
1-xyz的x轴、y轴转动,再沿矢量a1b1平移。动坐标系a
1-xyz首先绕定坐标系b
1-xyz的y轴转动β角,然后再让动
坐标系a
1-xyz绕定坐标系b
1-xyz的x轴转动α角,此时可以得到关于动坐标系的旋转矩阵,于是动坐标系相对于定坐标系的旋转矩阵为:
[0050][0051]
对于动坐标系内一点api,在其经过一系列旋转变换后,可以通过旋转矩阵r来表示,使得变换后的api点转换至设定的定坐标系中,即动坐标系内一点api在定坐标系中的坐标bpi可表示为:
[0052]bpi=rapi[0053]
动平台20上aai点经过旋转变换后,再通过空间平移变换实现动坐标系a
1-xyz到定坐标系b
1-xyz上
bai
点的转换,转换矩阵可表示为:
bai
=raai p0,其中,r为旋转矩阵,p0为动坐标系a
1-xyz原点相对于定坐标系b
1-xyz原点的位置。
[0054]
如图10所示,若动平台20连接点a1、a2、a3在动坐标系a
1-xyz坐标表示如下:ai=[a
ix
,a
iy
,a
iz
]
t
[0055]
则点a1、a2、a3在动坐标系a
1-xyz下的坐标为a1=[0 0 0]
t
、a2=[0 x
6 0]
t
、a3=[x
5 0 0]
t
。
[0056]
定平台9连接点b1、b2、b3在定坐标系b
1-xyz坐标表示如下:
[0057]bi
=[b
ix
,b
iy
,b
iz
]
t
[0058]
则点b1、b2、b3在定坐标系b
1-xyz下的坐标为b1=[0 0 0]
t
、b2=[0 x
6 0]
t
、b3=[x
5 0 0]
t
。
[0059]
动坐标系a
1-xyz原点相对于定坐标系b
1-xyz原点的位置为p0=[0 0 l1]
t
。
[0060]
则可得到动平台20三连接点在定平台9坐标系中表示:
[0061]
bai
=r
·aai p0[0062]
式中,r为旋转矩阵;p0为动坐标原点相对于定坐标原点的位置。
[0063]
通过上述分析,三个推杆的长度li(i=1,2,3)在定坐标系中可表示为:
[0064]
li=|
bai-bi|
[0065]
式中,
bai
为各支链上支点在定平台9中的坐标表示,bi为各支链下支点在定平台9中的坐标表示。
[0066]
运动学逆解表达式为:
[0067][0068]
则各支链推杆伸缩量表达式为:
[0069]
δli=l
i-l
i0
(i=1,2,3)。
[0070]
测试一:调节动平台20相对于定平台9绕y轴转动β角度的情况下,测量其产生的浮力和浮力矩。
[0071]
如图11所示,动平台20相对于定平台9绕y轴转动β角度,即浮力调节装置绕y轴转动角度β≠0、绕x轴转动角度α=0的情况下,根据上述动坐标系a
1-xyz中的点转换至定坐标系b
1-xyz的过程计算可得ai(i=1,2,3)点在定坐标系下的坐标
bai
为ba1=(0,0,l1)、ba2=(0,x6,l1)、ba3=(cosβx5,0,l
1-sinβx5),此时每个推杆的长度li(i=1,2,3)为:
[0072][0073]
设每个推杆的初始长度为l1、l2、l3,则每个推杆伸长量为:
[0074][0075]
调节对应推杆的伸长量,得到动平台20绕y轴转动β角,此时浮心o与z轴的距离为x0sinβ,记录此时六维力传感器8的x、y、z轴上力的示数f
x0
、f
y0
、f
z0
和x、y、z轴上力矩的示数m
x0
、m
y0
、m
z0
作为初始值,然后控制位于x轴方向上的浮力调节模块进行浮力调节,即控制第二浮力调节模块39和第四浮力调节模块36分别伸长δx2、δx4,记录六维力传感器8的x、y、z轴上力的示数f
x1
、f
y1
、f
z1
和x、y、z轴上力矩的示数m
x1
、m
y1
、m
z1
。
[0076]
此时,对于六维力传感器8来说,z轴方向上增加的浮力为fz=f2 f4,增加的浮力fz全部由浮力调节装置产生,而绕着y轴增加的浮力矩为:
[0077]my
=f4(x4cosβ 0.5δx4cosβ x0sinβ)-f2(x2cosβ 0.5δx2cosβ-x0sinβ)=f4(x4cosβ 0.5δx4cosβ)-f2(x2cosβ 0.5δx2cosβ) (f4 f2)x0sinβ
[0078]
由上式可知,绕着y轴增加的浮力矩由两部分构成,一部分是f4(x4cosβ 0.5δx4cosβ)-f2(x2cosβ 0.5δx2cosβ),该部分是由浮力调节装置产生的绕其几何中心的浮力矩,另一部分为(f4 f2)x0sinβ=fzx0sinβ,该部分是由浮力调节装置几何中心偏离六维力传感器8中心轴线而产生的附加浮力矩,当浮力调节装置安装在水下机器人上时,这部分附加浮力矩并不存在,所以,应在六维力传感器8的测量结果中予以去除,则浮力调节装置产生的浮力δf
x
、δfy、δfz和浮力矩δm
x
、δmy、δmz如下:
[0079][0080]
测试二:调节动平台20相对于定平台9绕x轴转动α角度的情况下,测量其产生的浮力和浮力矩。
[0081]
如图12所示,动平台20相对于定平台9绕x轴转动α角度,即浮力调节模块绕x轴转动角度α≠0、绕y轴转动角度β=0的情况下,根据上述动坐标系a
1-xyz中的点转换至定坐标系b
1-xyz的过程计算可得ai(i=1,2,3)点在定坐标系下的坐标
bai
为ba1=(0,0,l1)、ba2=(0,cosαx6,x6sinαl1)、ba3=(x5,0,l1),此时每个推杆的长度li(i=1,2,3)为:
[0082][0083]
设每个推杆的初始长度为l1、l2、l3,则每个推杆伸长量δli(i=1,2,3)为:
[0084][0085]
调节对应推杆的伸长量,得到动平台20绕x轴转动α角,此时浮心o与z轴的距离为x0sinα,记录此时六维力传感器8的x、y、z轴上力的示数f
x0
、f
y0
、f
z0
和x、y、z轴上力矩的示数m
x0
、m
y0
、m
z0
作为初始值,然后控制位于y轴方向上的浮力调节模块进行浮力调节,即控制第一浮力调节模块40和第三浮力调节模块38分别伸长δx1、δx3,记录六维力传感器8的x、y、z轴上力的示数f
x1
、f
y1
、f
z1
和x、y、z轴上力矩的示数m
x1
、m
y1
、m
z1
。
[0086]
此时,对于六维力传感器8来说,z轴方向上增加的浮力为fz=f1 f3,增加的浮力fz全部由浮力调节装置产生,而绕着x轴增加的浮力矩为:
[0087]mx
=f1(x1cosβ 0.5δx1cosβ x0sinβ)-f3(x3cosβ 0.5δx3cosβ-x0sinβ)=f1(x1cosβ 0.5δx1cosβ)-f3(x3cosβ 0.5δx3cosβ) (f3 f1)x0sinβ
[0088]
由上式可知,绕着x轴增加的浮力矩由两部分构成,一部分是f1(x1cosβ 0.5δx1cosβ)-f3(x3cosβ 0.5δx3cosβ),该部分是由浮力调节装置产生的绕其几何中心的浮力矩,另一部分为(f3 f1)x0sinβ=fzx0sinβ,该部分是由浮力调节装置几何中心偏离六维力传感器8中心轴线而产生的附加浮力矩,当浮力调节装置安装在水下机器人上时,这部分附加浮力矩并不存在,所以,应在六维力传感器8的测量结果中予以去除,则浮力调节装置产生的浮力δf
x
、δfy、δfz和浮力矩δm
x
、δmy、δmz如下:
[0089][0090]
测试三:调节动平台20相对于定平台9绕y轴转动β角度、绕x轴转动α角度的情况下,测量其产生的浮力和浮力矩。
[0091]
如图13所示,调节动平台20相对于定平台9绕y轴转动β角度、绕x轴转动α角度,即浮力调节装置绕y轴转动角度β≠0、绕x轴转动角度α≠0的情况下,根据上述动坐标系a
1-xyz中的点转换至定坐标系b
1-xyz的过程计算可得ai(i=1,2,3)点在定坐标系下的坐标
bai
为ba1=(0,0,l1),ba2=(sinβsinαx6,cosαx6,cosβsinαx6 l1),ba3=(cosβx5,0,l
1-sinβx5),此时每个推杆的长度li为:
[0092][0093]
设每个推杆的初始长度为l1、l2、l3,则每个推杆伸长量δli(i=1,2,3)为:
[0094][0095]
调节对应推杆的伸长量,如图13所示,得到动平台20绕y轴转动β角、绕x轴转动α角,此时经过浮心o与z轴在xa1z平面投影的距离为x0cosαsinβ、在ya1z平面投影的距离为x0cosβsinα,记录此时六维力传感器8的x、y、z轴上力的示数f
x0
、f
y0
、f
z0
和x、y、z轴上力矩的示数m
x0
、m
y0
、m
z0
作为初始值。控制第二浮力调节模块39和第三浮力调节模块38分别伸长δx2、δx3,记录六维力传感器8的x、y、z轴上力的示数f
x1
、f
y1
、f
z1
和x、y、z轴上力矩的示数m
x1
、m
y1
、m
z1
。控制第一浮力调节模块40、第二浮力调节模块39、第三浮力调节模块38、第四浮力调节模块36分别伸长δx1、δx2、δx3、δx4,记录此时六维力传感器8的x、y、z轴上力的示数f
x1
、f
y1
、f
z1
和x、y、z轴上力矩的示数m
x1
、m
y1
、m
z1
,则浮力调节装置产生的浮力δf
x
、δfy、δfz和浮力矩δm
x
、δmy、δmz如下:
[0096][0097]
改变δx1、δx2、δx3、δx4以及α、β,测得浮力调节装置在各浮力调节模块不同伸长量、不同俯仰角度、横滚角度情况下产生的浮力及浮力矩。
[0098]
最后收回推杆,通过丝杠驱动电机1驱动丝杠4,将测试平台移动至丝杠4最右端,卸载下浮力调节装置,测试结束。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。