技术特征:
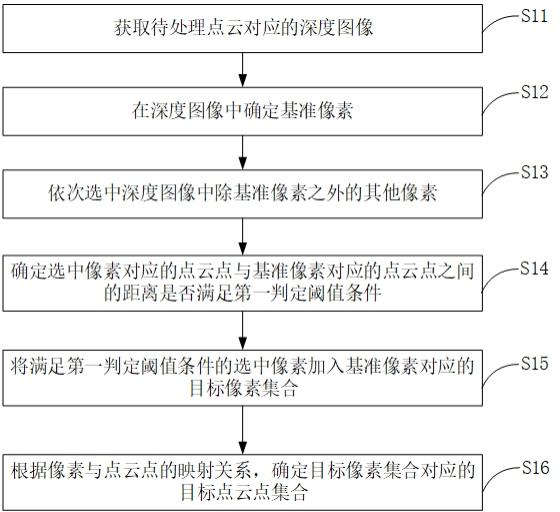
1.一种点云分割方法,其特征在于,所述方法包括:获取待处理点云对应的深度图像,其中所述深度图像包括沿相互垂直的第一方向和第二方向矩阵排列的多个像素;在所述深度图像中确定基准像素;依次选中所述深度图像中除所述基准像素之外的其他像素;确定选中像素对应的点云点与所述基准像素对应的点云点之间的距离是否满足第一判定阈值条件;其中,所述第一判定阈值条件基于所述选中像素的深度值确定;将满足所述第一判定阈值条件的选中像素加入所述基准像素对应的目标像素集合;根据像素与点云点的映射关系,确定所述目标像素集合对应的目标点云点集合。2.根据权利要求1所述的方法,其特征在于,所述确定选中像素对应的点云点与所述基准像素对应的点云点之间的距离是否满足第一判定阈值条件,包括:确定所述选中像素对应的点云点与所述基准像素对应的点云之间的距离是否小于或等于第一距离阈值;和/或,确定所述选中像素对应的点云点所在的切平面与所述基准像素对应的点云点所在的切平面之间的距离是否小于或等于第二距离阈值。3.根据权利要求2所述的方法,其特征在于,所述第一距离阈值是对所述选中像素的深度值的1到m的整数次幂进行加权求和获得,m为不小于2的正整数。4.根据权利要求1所述的方法,其特征在于,所述依次选中所述深度图像中的其他像素,包括:以所述基准像素作为起始像素;以所述起始像素为起点沿所述第一方向确定与所述起始像素间隔搜索步长的像素作为所述选中像素;所述将满足所述第一判定阈值条件的选中像素加入所述基准像素对应的目标像素集合,包括:若所述选中像素对应的点云点与所述基准像素对应的点云点之间的距离满足所述第一判定阈值条件,则将所述选中像素以及所述选中像素与所述基准像素连线上的像素均加入所述基准像素对应的目标像素集合。5.根据权利要求4所述的方法,其特征在于,所述依次选中所述深度图像中的其他像素,包括:若由所述搜索步长确定的所述选中像素对应的点云点与所述基准像素对应的点云点之间的距离不满足所述第一判定阈值条件,则按照预定方向依次以由所述搜索步长确定的所述选中像素与所述起始像素之间的像素作为所述选中像素,所述预定方向为由所述搜索步长确定的所述选中像素到所述起始像素的方向。6.根据权利要求4所述的方法,其特征在于,所述方法进一步包括:若由所述搜索步长确定的所述选中像素对应的点云点与所述基准像素对应的点云点之间的距离满足所述第一判定阈值条件,则以所述选中像素作为所述起始像素,并返回所述以所述起始像素为起点沿所述第一方向确定与所述起始像素间隔搜索步长的像素作为所述选中像素的步骤,直至由所述搜索步长确定的所述选中像素对应的点云点与所述基准像素对应的点云点之间
的距离不满足所述第一判定阈值条件。7.根据权利要求6所述的方法,其特征在于,所述依次选中所述深度图像中的其他像素,包括:以所述目标像素集合中沿所述第一方向排列的同一行或列中的最边缘像素在所述第二方向上的相邻像素为所述起始像素,返回所述以所述起始像素为起点沿所述第一方向确定与所述起始像素间隔搜索步长的像素作为所述选中像素的步骤。8.根据权利要求4-7任意一项所述的方法,其特征在于,所述搜索步长根据所述基准像素的深度值确定。9.根据权利要求8所述的方法,其特征在于,所述搜索步长是对所述基准像素的深度值的1到k整数次幂进行加权求和获得,k为不小于2的正整数。10.根据权利要求1所述的方法,其特征在于,所述方法还包括:在所述深度图像中包括至少两个所述目标像素集合时,将满足第二判定阈值条件的相邻所述目标像素集合融合为一个目标像素集合。11.根据权利要求10所述的方法,其特征在于,所述将相邻所述目标像素集合融合为一个目标像素集合,包括:以每个所述目标像素集合中的基准像素所对应的点云点作为参考点,并将每个所述目标像素集合中的各像素对应的点云点的法向量进行归一化,以获得归一化法向量;基于所述参考点和所述归一化法向量确定每个所述目标像素集合对应的参考切平面;确定相邻所述目标像素集合的参考切平面之间的距离是否小于或等于第三距离阈值;若小于或等于第三距离阈值,则满足所述第二判定阈值条件。12.一种移动机器人,其特征在于,所述移动机器人包括相互耦接的处理器和存储器;所述存储器中存储有计算机程序,所述处理器用于执行所述计算机程序以实现如权利要求1-11中任一项所述方法的步骤。13.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有程序数据,所述程序数据被处理器执行时实现如权利要求1-11中任一项所述方法的步骤。
技术总结
本申请公开了一种点云分割方法、移动机器人及计算机可读存储介质。该方法包括:获取待处理点云对应的深度图像,其中深度图像包括沿相互垂直的第一方向和第二方向矩阵排列的多个像素;在深度图像中确定基准像素;依次选中深度图像中除所述基准像素之外的其他像素;确定选中像素对应的点云点与基准像素对应的点云点之间的距离是否满足第一判定阈值条件;其中,第一判定阈值条件基于选中像素的深度值确定;将满足第一判定阈值条件的选中像素加入基准像素对应的目标像素集合;根据像素与点云点的映射关系,确定目标像素集合对应的目标点云点集合。通过上述方式,本申请能够提高点云分割的鲁棒性。割的鲁棒性。割的鲁棒性。
技术研发人员:汪鹏飞 马子昂
受保护的技术使用者:杭州华橙软件技术有限公司
技术研发日:2022.10.25
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。