1.本发明涉及深度学习技术领域,尤其一种基于卷积神经网络的故障诊断方法。
背景技术:
2.在现代工业中,机械设备的故障诊断具有十分重要的意义,一旦机械设备发生故障,则会造成巨大的经济财产损失,更有甚者会带来不同程度的人员伤亡。因此,寻找更好的故障诊断方法以保证机器的正常运行就显得十分必要。滚动轴承是机械设备中最常用的部件,被人们称为机械的关节。它具有效率高、摩擦阻力小、装配方便,润滑易实现等优点,因此在旋转机械上应用非常普遍。滚动轴承作为旋转机械如齿轮箱、涡轮机械的核心部件之一,其健康状况对机器的稳定性和寿命有很大的影响。在工作过程中,滚动轴承由于润滑剂污染,过载等原因可能会发生外圈损坏、内圈损坏、滚动体损坏等故障。因此,有效的故障诊断方法对滚动轴承的寿命和稳定性至关重要。而传统故障诊断具有速度慢,精度不高的缺陷,这在工业生产中是致命的。
3.针对上述技术问题,本发明提供一种基于卷积神经网络的故障诊断方法。
技术实现要素:
4.本发明的目的是针对现有技术的缺陷,提供了一种基于卷积神经网络的故障诊断方法。
5.为了实现以上目的,本发明采用以下技术方案:
6.一种基于卷积神经网络的故障诊断方法,包括:
7.s1.获取与机械设备相对应的故障数据;
8.s2.对获取的故障数据进行预处理,得到故障数据相对应的特征数据;
9.s3.将特征数据输入至卷积神经网络中进行训练,输出诊断模型;
10.s4.将待处理数据输入到训练好的诊断模型中进行处理,诊断模型输出故障诊断结果。
11.进一步的,所述步骤s1中获取故障数据是通过预先安装于机械设备上的数个传感器获取到的。
12.进一步的,所述步骤s2中的卷积神经网络包括:
13.多层的卷积层,用于提取输入的不同特征,第一层卷积层提取低级的特征,更多层的网络从低级特征中迭代提取复杂的特征;
14.线性整流层,用于神经的活性化函数;
15.池化层:用于将卷积层得到的维度特征切成几个区域,取最大值或平均值,得到新的、维度较小的特征;
16.全连接层:用于把所有局部特征结合变成全局特征,用来计算最后每一类的得分。
17.进一步的,所述步骤s3具体包括:
18.s31.对卷积神经网络进行权值的初始化;
19.s32.对输入的故障数据经过卷积层、线性整流层、池化层、全连接层的传播到输出数据;
20.s33.得到输出数据与实际数据之间的误差;
21.s34.当得出的误差小于期望值或达到训练次数时,结束训练;当误差大于期望值,将误差传回神经网络中,进行权值更新,得到最终的诊断模型。
22.进一步的,所述多层的卷积层是通过二维滤波器滑动到二维图像上所有位置,并在每个位置上与该像素点及其领域像素点做内积。
23.进一步的,所述线性整流层是把卷积层输出结果做非线性映射。
24.进一步的,所述池化层是通过减少网络的参数来减小计算量,并且能够在一定程度上控制过拟合。
25.进一步的,所述池化层中的最大池化是取四个点的最大值;均值池化是取四个点的均值。
26.进一步的,所述全连接层为任意一个卷积层通过将权重变成一个巨大的矩阵。
27.现有技术相比,本发明采取基于卷积神经网络的故障诊断,可以大大提高诊断的精确率和速度,通过采用一种基于卷积神经网络而设计的训练模型,其准确率可达到98%。
附图说明
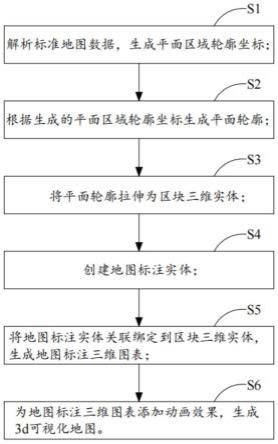
28.图1是实施例一提供的一种基于卷积神经网络的故障诊断方法流程图;
29.图2是实施例二提供的采用卷积神经网络的输出结果示意图;
30.图3是实施例二提供的采用卷积神经网络的输出结果示意图。
具体实施方式
31.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
32.本发明的目的是针对现有技术的缺陷,提供了一种基于卷积神经网络的故障诊断方法。
33.实施例一
34.本实施例提供的一种基于卷积神经网络的故障诊断方法,如图1所示,包括:
35.s1.获取与机械设备相对应的故障数据;
36.s2.对获取的故障数据进行预处理,得到故障数据相对应的特征数据;
37.s3.将特征数据输入至卷积神经网络中进行训练,输出诊断模型;
38.s4.将待处理数据输入到训练好的诊断模型中进行处理,诊断模型输出故障诊断结果。
39.在步骤s1中,获取与机械设备相对应的故障数据。
40.数据采集的方法是将传感器安装在机器上以不断采集数据。不同的数据需要使用不同的传感器,如振动、声发射、温度和电流互感器。电流数据在电动机械的故障诊断中起
着重要作用。仅使用电流互感器即可轻松收集此类数据。根据发现,来自多源传感器的数据具有互补信息,与仅使用来自单个传感器的数据相比,这些信息可以进行融合以实现更高的诊断准确率。
41.在步骤s2中,对获取的故障数据进行预处理,得到故障数据相对应的特征数据。
42.在步骤s3中,将特征数据输入至卷积神经网络中进行训练,输出诊断模型;具体包括:
43.s31.对卷积神经网络进行权值的初始化;
44.s32.对输入的故障数据经过卷积层、线性整流层、池化层、全连接层的传播到输出数据;
45.s33.得到输出数据与实际数据之间的误差;
46.s34.当得出的误差小于期望值或达到训练次数时,结束训练;当误差大于期望值,将误差传回神经网络中,进行权值更新,得到最终的诊断模型。
47.卷积神经网络与普通神经网络的区别在于,卷积神经网络包含多个由卷积层和池化层构成的特征抽取器。在卷积神经网络的卷积层中,一个神经元只与部分邻层神经元连接。在cnn的一个卷积层中,通常包含若干个特征平面(featuremap),每个特征平面由一些矩形排列的神经元组成,同一特征平面的神经元共享权值,这里共享的权值就是卷积核。卷积核一般以随机小数矩阵的形式初始化,在网络的训练过程中卷积核将学习得到合理的权值。共享权值(卷积核)带来的直接好处是减少网络各层之间的连接,同时又降低了过拟合的风险。子采样也叫做池化(pooling),通常有均值子采样(mean pooling)和最大值子采样(max pooling)两种形式。子采样可以看作一种特殊的卷积过程。卷积和子采样大大简化了模型复杂度,减少了模型的参数。
48.通过多层的卷积,池化,全连接,降低图片维度,最后转化成了一个一维向量。这个向量就包含了图片的特征,当然这个特征不是肉眼上的图片特征,而是针对于神经网络的特征。
49.卷积神经网络通常包含以下几种层:
50.卷积层:卷积神经网路中每层卷积层由若干卷积单元组成,每个卷积单元的参数都是通过反向传播算法优化得到的。卷积运算的目的是提取输入的不同特征,第一层卷积层可能只能提取一些低级的特征如边缘、线条和角等层级,更多层的网络能从低级特征中迭代提取更复杂的特征。
51.线性整流层:这一层神经的活性化函数(activation function)使用线性整流(relu)。
52.池化层:通常在卷积层之后会得到维度很大的特征,将特征切成几个区域,取其最大值或平均值,得到新的、维度较小的特征。
53.全连接层:把所有局部特征结合变成全局特征,用来计算最后每一类的得分。
54.卷积层是卷积神经网络的核心基石。即离散二维滤波器(也称作卷积核)与二维图像做卷积操作,简单的讲是二维滤波器滑动到二维图像上所有位置,并在每个位置上与该像素点及其领域像素点做内积。卷积操作被广泛应用与图像处理领域,不同卷积核可以提取不同的特征,例如边沿、线性、角等特征。在深层卷积神经网络中,通过卷积操作可以提取出图像低级到复杂的特征。
55.局部连接:每个神经元仅与输入神经元的一块区域连接,这块局部区域称作感受野(receptive field)。在图像卷积操作中,即神经元在空间维度(spatial dimension,即上图示例h和w所在的平面)是局部连接,但在深度上是全部连接。对于二维图像本身而言,也是局部像素关联较强。这种局部连接保证了学习后的过滤器能够对于局部的输入特征有最强的响应。局部连接的思想,也是受启发于生物学里面的视觉系统结构,视觉皮层的神经元就是局部接受信息的。
56.权重共享:计算同一个深度切片的神经元时采用的滤波器是共享的。共享权重在一定程度上讲是有意义的,例如图片的底层边缘特征与特征在图中的具体位置无关。但是在一些场景中是无意的,比如输入的图片是人脸,眼睛和头发位于不同的位置,希望在不同的位置学到不同的特征。请注意权重只是对于同一深度切片的神经元是共享的,在卷积层,通常采用多组卷积核提取不同特征,即对应不同深度切片的特征,不同深度切片的神经元权重是不共享。另外,偏重对同一深度切片的所有神经元都是共享的。
57.线性整流层:把卷积层输出结果做非线性映射。cnn采用的激励函数一般为relu,它的特点是收敛快、求梯度简单但是比较脆弱。
58.池化层:池化(pool)即下采样(downsamples),目的是为了减少特征图,主要作用是通过减少网络的参数来减小计算量,并且能够在一定程度上控制过拟合。通常在卷积层的后面会加上一个池化层。池化操作对每个深度切片独立,规模一般为2*2,相对于卷积层进行卷积运算,池化层进行的运算一般有以下几种:
59.最大池化,取四个点的最大值。均值池化,取四个点的均值。
60.最常见的池化层是规模为2*2,步幅为2,对输入的每个深度切片进行下采样。
61.池化操作将保存深度大小不变。如果池化层的输入单元大小不是二的整数倍,一般采取边缘补零(zero-padding)的方式补成2的倍数,然后再池化。
62.全连接层:全连接层和卷积层可以相互转换:
63.对于任意一个卷积层,要把它变成全连接层只需要把权重变成一个巨大的矩阵,其中大部分都是0除了一些特定区块(因为局部感知),而且好多区块的权值还相同(由于权重共享)。
64.相反地,对于任何一个全连接层也可以变为卷积层。
65.卷积神经网络有着其得天独厚的优势,比如共享卷积核,对高维数据处理无压力;无需手动选取特征,训练好参数,特征分类效果就好。
66.实施例二
67.本实施例提供的一种基于卷积神经网络的故障诊断方法与实施例一的不同之处在于:
68.从网站上下载对轴承和轴承故障的测试数据。使用2马力信实电机进行了实验,并在电机轴承附近和远离电机轴承的位置测量了加速度数据。采用电火花加工(edm)对电机轴承进行故障诊断。分别在内滚道、滚动体(球体)和外滚道引入直径为0.007英寸至0.040英寸的故障。将故障轴承重新安装到试验电机中,记录0-3马力(电机转速为1797-1720rpm)的电机负载的振动数据。
69.测试台由2马力的电机(左)、扭矩传感器/编码器(中心)、测力计(右)和控制电子组成。测试轴承支撑电机轴。采用电火花加工将单点故障引入试验轴承,故障直径为7密耳、
14密耳、21密耳、28密耳和40密耳(1密耳=0.001英寸)。参见故障深度的故障规范。对于7、14和21密耳的直径故障,使用skf轴承,对于28密耳和40密耳的故障使用ntn等效轴承。驱动端和风扇端轴承规范,包括轴承几何形状和缺陷频率列在轴承规范。
70.使用加速度计收集振动数据,加速度计连接到具有磁性基底的壳体。加速度计被放置在电机壳体的驱动端和风扇端的十二点位置。在一些实验中,加速度计也安装在电机支撑基板上。使用16通道dat记录器采集振动信号,并在matlab环境中进行后处理。所有数据文件都在matlab(*.mat)格式中。以每秒12000个样本收集数字数据,以每秒48000个样本收集驱动端轴承故障。使用扭矩传感器/编码器收集速度和马力数据,并用手记录。
71.外滚道故障是静止故障,因此故障相对于轴承负载区的布置直接影响电机/轴承系统的振动响应。为了量化这种影响,在三点钟(直接在加载区)、六点钟(与负载区正交)和12点钟,对具有外滚道故障的风扇和驱动端轴承进行了实验。
72.数据收集的正常轴承,单点驱动端和风扇端部缺陷。数据收集在12000个样本/第二次和48000个样本/秒的驱动端轴承实验。所有风扇端轴承数据收集在12000个样本/秒。
73.由于数据集都是mat文件,因此首先需要建立一个函数读取mat文件,并将其转换为可供python使用的数据,从matlab先读取文件可以发现。
74.其中包含的基本都是这四个文件,具体含义在上文中已经有提到,而数字代表的是其具体的故障分类。可以发现其有三个不同位置测量的加速度数据,在这里我们使用de(去驱动端)加速度数据,想要采取其他的只需改变代码中的名称即可。最先开始需要导包和全局变量定义;然后需要将x121_de_time这个标签给它提取出来,才能得到具体的数据。
75.先通过scipy包中的loadmat函数,将mat文件读入到python中,在通过filter()过滤掉其他的不符合条件的算法,即留下x121_de_time,然后将其数据保存在time_series变量中。然后将time_series变量分割成(数据长度/每一份数据的向量长度-1)*每一个数据的向量长度维数的数据date_x,data_y即为data_x对应的标签。
76.接着将其进行打乱操作。此函数封装在creat_data.py文件中的load_mat函数中,这一步主要是用来导入.mat文件。以方便后面的数据集、训练集分割。紧接着构建训练数据集和测试数据集,先建立一个列表,其中为数据集中的文件名。紧跟着的是每一个数据集对应的标签。
77.对应的训练集和测试集分割,因为每一个mat文件中的数据量都很大,基本通过load_mat会得到58*2048维度的数据,因此取前50个为训练集,后8个为测试集,以此作为分割。紧跟着对其进行打乱。此函数封装在creat_data.py中的load_data()函数中,主要用来构成训练所用的数据集。
78.定义cnn网络:
79.构建了一个两层卷积、两层池化、一层全连接层的网络,通过此网络对数据集进行训练、测试。
80.如图2-3所示可以发现采用cnn的准确率非常的高,远超过深度神经网络在此项目中的准确率。
81.从实验结果可以看出,卷积神经网络对于特征提取有着非常大的优势,深度神经网络虽然也能用来做故障诊断,但是其准确率并不是很高。而卷积神经网络能够得到98%的准确率,效果十分理想。
82.将深度学习的技术引入故障诊断的领域,可以更加高效准确地识别机器地健康状况,与传统方法相比,基于深度学习的机械故障诊断方法具有下列优势:(1)深度学习具有较强的自我学习能力,能够避免对专家诊断经验的依赖;(2)通过建立深层的学习模型,能更好得呈现出庞大的检测数据和设备健康状况之间的映射关系,以提高检测诊断能力;(3)深度学习自带分类器对自动提取的特征参数进行识别,减少人为选择的影响。
83.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。