1.本发明涉及旋转电机、具备旋转电机的机器人以及旋转电机的制造方法。
背景技术:
2.在专利文献1的永磁型电机中,公开了由将径向作为磁化方向的主永磁铁和将周向作为磁化方向的辅助永磁铁构成的海尔贝克磁铁阵列的径向间隙电机。
3.专利文献1:日本特开2004-15906号公报
4.但是,在专利文献1中,是组合多个磁化方向不同的各向异性磁铁的结构,在主永磁铁与辅助永磁铁的边界,磁通密度分布容易从正弦波偏离。其结果是,存在有容易产生齿槽转矩这样的课题。
技术实现要素:
5.一种旋转电机,具备:定子,具有线圈;以及转子,与所述定子分离地配置,并以旋转轴为中心旋转,所述转子具有:转子框架,与所述旋转轴连接;以及磁铁,配置于所述转子框架,在将从所述磁铁朝向所述线圈的方向设为第一方向的情况下,所述磁铁具有:多个第一磁铁,具有各向异性,且至少沿所述第一方向被磁化;以及第二磁铁,具有各向同性,且配置于所述第一方向上的正侧的所述第一磁铁的端面。
6.机器人具备上述记载的旋转电机和被所述旋转电机驱动的被驱动构件。
7.一种旋转电机的制造方法,所述旋转电机具有:定子,具有线圈;转子,围绕旋转轴旋转;转子框架,与所述旋转轴连接;以及磁铁,具有各向异性磁铁和各向同性磁铁,所述旋转电机的制造方法具备:各向异性磁铁配置工序,将未充磁的所述各向异性磁铁配置于所述转子框架;各向同性磁铁配置工序,在将从所述各向异性磁铁朝向所述线圈的方向设为第一方向的情况下,将未充磁的所述各向同性磁铁配置于所述各向异性磁铁的所述第一方向上的正侧的端面;充磁工序,对所配置的未充磁的所述各向异性磁铁和所述各向同性磁铁进行充磁;以及定子配置工序,相对于配置已充磁的所述各向异性磁铁和所述各向同性磁铁的所述转子,在所述第一方向上配置所述定子。
附图说明
8.图1是表示第一实施方式所涉及的旋转电机的概略结构的剖视图。
9.图2是表示磁铁的结构的立体图。
10.图3是用与径向正交的面切断转子的情况下的局部剖视图。
11.图4是说明旋转电机的制造方法的流程图。
12.图5是表示第二实施方式所涉及的旋转电机的磁铁的结构的剖视图。
13.图6是表示第三实施方式所涉及的旋转电机的磁铁的结构的剖视图。
14.图7是表示第四实施方式所涉及的旋转电机的磁铁的结构的剖视图。
15.图8是表示第五实施方式所涉及的旋转电机的磁铁的结构的剖视图。
16.图9是表示第六实施方式所涉及的旋转电机的磁铁的结构的剖视图。
17.图10是表示第七实施方式所涉及的旋转电机的磁铁的结构的剖视图。
18.图11是表示第八实施方式所涉及的旋转电机的磁铁的结构的剖视图。
19.图12是表示第九实施方式所涉及的旋转电机的磁铁的结构的剖视图。
20.图13是表示第十实施方式所涉及的旋转电机的结构的概略立体图。
21.图14是表示旋转电机的结构的概略俯视图。
22.图15是表示第十一实施方式所涉及的旋转电机的结构的概略俯视图。
23.图16是表示第十二实施方式所涉及的旋转电机的结构的概略俯视图。
24.图17是表示第十三实施方式所涉及的机器人的结构的立体图。
25.图18是简易地表示机器人的结构的图。
26.附图标记说明
27.1、1a~1e、2、2a、2b、10、10a、10b:旋转电机;3:转子;5:定子;6、6b~6e、8、8a、9、9a、9b:第一磁铁;7、7a、75、75a、75b:第二磁铁;32、32d、32e、33、38、38a、38b:转子框架;53:线圈;61、91、91a、91b:主磁极磁铁;62、62b、62c、92、92a、92b:副磁极磁铁;71:圆弧状磁铁;100、100a~100e、150、150a、150b、200、200a、200b:磁铁;300、310:旋转轴;1000:机器人;1010:作为根部侧臂(根本側
アーム
)的第一臂;1100:作为被驱动构件的机械臂。
具体实施方式
28.以下,参照附图对用于实施本发明的方式进行说明。但是,在各图中,将各部的尺寸以及比例尺图示为与实际情况适当地不同。
29.1.第一实施方式
30.图1是表示第一实施方式所涉及的旋转电机1的概略结构的剖视图。此外,在图1中,旋转电机1构成为轴向间隙电机。
31.轴向间隙电机是在后述的旋转轴300的轴向a上具有磁铁100与线圈53的间隙的电机。如图1所示,旋转电机1是采用了所谓的1转子1定子构造的电机。
32.具体而言,如图1所示,旋转电机1具备:圆环状的转子3,围绕旋转轴300旋转;定子5,沿旋转轴300配置于转子3(详细而言为转子框架32)的上侧;以及壳体4,配置于下侧。
33.在以下的说明中,将沿旋转轴300的中心轴ax的方向称为“轴向a”或者“上下方向”,将转子3的周向称为“周向c”,将转子3的径向称为“径向r”。另外,特别是将从定子5朝向壳体4的方向称为“下方向a1”,将从壳体4朝向定子5的方向称为“上方向a2”。
34.旋转轴300是中空的圆柱体。此外,旋转轴300也可以是实心的圆柱体。在本实施方式的旋转电机1中,构成为使旋转轴300的径向变大,并且作为中空轴,使朝向旋转电机1的配线通过旋转轴300的中空部分。
35.转子3具备:转子固定部31,固定于旋转轴300;转子框架32,从转子固定部31沿径向延伸而呈圆板状;以及作为永磁铁的磁铁100,支承于转子框架32。磁铁100在转子框架32的径向r的终端附近沿周向c配置。此外,转子3的详细内容见后述。
36.在转子框架32的上方向a2上隔着间隙配置有定子5。定子5具有呈圆环状的顶壳51、多个定子铁芯52、配置于各定子铁芯52的线圈53、以及连接多个定子铁芯52彼此的背轭54。定子铁芯52以及背轭54配置于顶壳51的下方向a1,背轭54固定于顶壳51。
37.顶壳51例如由奥氏体系不锈钢等非磁性材料构成。除此以外,也可以由电磁钢板的层叠体、磁性粉末的压粉体等各种磁性材料构成,在磁性材料中也可以特别由软磁性材料构成。此外,顶壳51也可以由多个部位的集合体构成。
38.如上所述,定子5具有多个定子铁芯52以及背轭54。背轭54是沿周向c的呈圆环状的构件。定子铁芯52从背轭54起沿下方向a1突出。另外,定子铁芯52沿周向c与磁铁100具有规定的间隙而对置,并等间隔地排列。各定子铁芯52以及背轭54例如由电磁钢板的层叠体、磁性粉末的压粉体等各种磁性材料构成,在磁性材料之中也特别由软磁性材料构成。
39.背轭54例如可以通过熔融、粘接剂、焊接等固定于顶壳51,也可以使用各种卡合构造与顶壳51卡合。
40.线圈53缠绕于定子铁芯52的外周。然后,由定子铁芯52和线圈53构成电磁铁。线圈53可以是缠绕于定子铁心52的导线,也可以是预先将导线卷绕为线轴状,而后将其嵌于定子铁心52的外周的导线。
41.旋转电机1具有未图示的通电电路。各线圈53与该通电电路连接。朝向各线圈53以规定的周期或者规定的模式通电。例如,当对各线圈53施加三相交流时,从电磁铁产生磁通而对对置的磁铁100作用磁力。通过周期性地反复该状态,转子3以旋转轴300为中心旋转。
42.壳体4构成为与定子5同样地夹着转子3。此外,壳体4具备与顶壳51相对地呈圆环状的底壳41。壳体4不具备定子5所具有的电磁铁。壳体4具备连接底壳41和顶壳51的中心壳42。中心壳42位于转子3的外侧而呈圆筒状。此外,壳体4也可以整体由树脂构件构成。
43.壳体4的底壳41与转子3的转子固定部31之间经由滚珠轴承350连接。另外,定子5的顶壳51与转子3的转子固定部31之间也经由滚珠轴承350连接。由于滚珠轴承350的动作相同,因此,以下,以下方向a1的滚珠轴承350的动作为代表进行说明。
44.滚珠轴承350具备内圈351、外圈352、滚动体353。底壳41与外圈352连接,转子固定部31与内圈351连接。内圈351以及外圈352经由滚动体353相互旋转。由此,转子3被支承为能够相对于定子5、壳体4旋转。此外,滚珠轴承350也可以用其他种类的轴承置换。
45.图2是表示磁铁100的结构的立体图。图3是将转子3在与径向r正交的面切断的情况下的局部剖视图。此外,图3的第一磁铁6所示的箭头示意性地表示第一磁铁6的磁极的朝向。另外,图3的第二磁铁7所示的箭头示意性地表示第二磁铁7的磁通线的朝向。
46.如图2、图3所示,磁铁100具有:第一磁铁6,具有各向异性;以及第二磁铁7,具有各向同性。在此,将从磁铁100朝向图1所示的线圈53的方向设为第一方向。在本实施方式中,第一方向与上方向a2相对应。然后,第二磁铁7配置于第一磁铁6的第一方向(上方向a2)上的正侧的端面。
47.此外,在本实施方式中,正侧与线圈53侧相对应。另外,配置于第一磁铁6的第一方向(上方向a2)上的正侧的端面的第二磁铁7包括第一磁铁6与第二磁铁7粘接的情况、未粘接的情况。在本实施方式中,第一磁铁6与第二磁铁7被粘接固定。
48.第一磁铁6具有主磁极磁铁61以及副磁极磁铁62。另外,第一磁铁6通过组合主磁极磁铁61和与主磁极磁铁61相邻的副磁极磁铁62而形成为环状。详细而言,第一磁铁6的主磁极磁铁61和副磁极磁铁62沿周向c以规定的节距交替配置。主磁极磁铁61和副磁极磁铁62以所谓的海尔贝克阵列配置。
49.本实施方式的第一磁铁6(主磁极磁铁61和副磁极磁铁62)是nd-fe-b烧结磁铁,通
过一边施加磁场一边对粉末状的磁性材料进行压缩成形而具有各向异性。另外,本实施方式的第一磁铁6具有平行各向异性。本实施方式的第二磁铁7是铁氧体烧结磁铁。第二磁铁7通过不施加磁场地对粉末状的磁性材料进行压缩成形而具有各向同性。
50.各向异性磁铁是仅在一个方向上被磁化的磁铁,除了平行各向异性磁铁以外,还可以使用在径向上被磁化的径向各向异性磁铁。此外,在本实施方式中,使用平行各向异性的磁铁。
51.对本实施方式的第一磁铁6的阵列详细地进行说明。
52.如图3所示,主磁极磁铁61使用在上下方向(轴向a)的两个方向上被磁化的磁铁。主磁极磁铁61具有向下方向a1被磁化的第一主磁极磁铁611和向上方向a2被磁化的第二主磁极磁铁612。副磁极磁铁62使用在周向c的两个方向上被磁化的磁铁。副磁极磁铁62具有向周向c右侧被磁化的第一副磁极磁铁621和向周向c左侧被磁化的第二副磁极磁铁622。
53.具体而言,如图3所示,在纸面中位于最左侧的第一主磁极磁铁611(作为第一主磁极磁铁611a)的上方向a2成为n极,下方向a1成为s极。从该第一主磁极磁铁611a向右方向夹着第一副磁极磁铁621(作为第一副磁极磁铁621a)的第二主磁极磁铁612(作为第二主磁极磁铁612a)的下方向a1成为n极,上方向a2成为s极。第一副磁极磁铁621a配置于左侧的第一主磁极磁铁611a与右侧的第二主磁极磁铁612a之间,以从第一主磁极磁铁611a朝向第二主磁极磁铁612a的方式被磁化。
54.接着,从第二主磁极磁铁612a向右方向夹着第二副磁极磁铁622(作为第二副磁极磁铁622a)而再次配置有第一主磁极磁铁611(作为第一主磁极磁铁611b)。第二副磁极磁铁622(第二副磁极磁铁622a)配置于左侧的第二主磁极磁铁612a与右侧的第一主磁极磁铁611b之间,以从第一主磁极磁铁611b朝向第二主磁极磁铁612a的方式被磁化。在本实施方式中,以如上那样的排列反复地配置主磁极磁铁61和副磁极磁铁62。在图3中,在第一主磁极磁铁611b的右侧,依次排列第一副磁极磁铁621b、第二主磁极磁铁612b、第二副磁极磁铁622b。
55.如图3所示,从纸面中最左侧起,磁通按照第一主磁极磁铁611a、第一副磁极磁铁621a、第二主磁极磁铁612a的顺序流动。在接下来的排列中,磁通按照第一主磁极磁铁611b、第二副磁极磁铁622a、第二主磁极磁铁612a的顺序流动。反复进行这样的磁通的流动。
56.在本实施方式中,与上述第一磁铁6的上表面相对地配置有第二磁铁7。如上所述,第二磁铁7以环状构成为一体。另外,第二磁铁7的下表面和第一磁铁6(主磁极磁铁61和副磁极磁铁62)的上表面通过粘接材料等粘贴固定。在上述主磁极磁铁61、副磁极磁铁62中,也通过粘接材料等相互粘贴固定。进而,第一磁铁6和位于下侧的转子框架32也通过粘接材料等相互粘贴固定。
57.在本实施方式中,如图3所示,第二磁铁7在第一主磁极磁铁611的上部被磁化为n极,在第二主磁极磁铁612的上部被磁化为s极。如上所述,第二磁铁7被反复磁化为n极和s极。
58.因而,磁通在纸面中从最左侧起从第二磁铁7的n极依次流过下方的第一磁铁6的第一主磁极磁铁611a、第一副磁极磁铁621a、第二主磁极磁铁612a,从第二磁铁7的s极流向与上方向的线圈之间的间隙的空间。此外,来自第二磁铁7的n极的磁通也流向右侧的第二
磁铁7的s极。
59.另外,在接下来的排列中,磁通从位于第一主磁极磁铁611b的上部的第二磁铁7的n极依次流过第一主磁极磁铁611b、第二副磁极磁铁622a、第二主磁极磁铁612a,从第二磁铁7的s极流向与上方向的线圈之间的间隙的空间。此外,来自第二磁铁7的n极的磁通也流向左侧的第二磁铁7的s极。反复进行这样的磁通的流动。
60.另外,详细而言,从纸面中最左侧的第二磁铁7的n极起,其下部的第一主磁极磁铁611a也同样,但是磁通向左右分开流动。来自纸面中最左侧的第二磁铁7的n极的磁通向第二磁铁7的左侧的s极、右侧的s极分开流动。在第一主磁极磁铁611a中流动的磁通向左侧的第二副磁极磁铁(省略图示)和右侧的第一副磁极磁铁621a分开流动。
61.另外,在第二主磁极磁铁612a聚集有从左右的第一副磁极磁铁621a和第二副磁极磁铁622a流过来的磁通,并流向位于上部的第二磁铁7的s极。另外,该第二磁铁7的s极聚集有从左右的第二磁铁7的n极流过来的磁通,并流向与上方向的线圈之间的间隙的空间。
62.根据基于第一磁铁6的主磁极磁铁61和副磁极磁铁62的配置,在主磁极磁铁61和副磁极磁铁62连接的边界,磁通密度分布不平滑,磁通密度分布容易从正弦波偏离。但是,在本实施方式中,在第一磁铁6的第一方向(上方向a2)上的正侧的端面配置有第二磁铁7。另外,第二磁铁7的n极和s极与第一主磁极磁铁611和第二主磁极磁铁612的磁极相对应。由此,能够使第一磁铁6的主磁极磁铁61与副磁极磁铁62彼此的边界处的磁通密度分布平滑,能够使磁通密度分布接近正弦波。由此,能够抑制齿槽转矩的产生。另外,通过具有各向同性的第二磁铁7而使磁通密度分布接近正弦波,能够实现如下效果:实现齿槽效应的抑制和通过具有各向异性的多个第一磁铁6而使磁通密度提高的兼顾。
63.图4是对旋转电机1的制造方法进行说明的流程图。
64.以下,参照图4对旋转电机1的制造方法进行说明。
65.首先,进行各向异性磁铁配置工序(步骤s100)。详细而言,将未充磁的各向异性磁铁(未充磁的第一磁铁6)配置并固定于转子框架32。在将从各向异性磁铁朝向线圈53的方向设为第一方向的情况下,接着进行各向同性磁铁配置工序(步骤s101)。详细而言,将未充磁的各向同性磁铁(未充磁的第二磁铁7)配置并固定于各向异性磁铁的第一方向上的正侧的端面。这两个工序是配置未充磁的第一磁铁6和在其上端面配置未充磁的第二磁铁7,由于未充磁,因此第一磁铁6、第二磁铁7几乎不产生磁力,因此第一磁铁6彼此、第二磁铁7不会相互吸引,配置作业容易。
66.接着,进行充磁工序(步骤s102)。详细而言,考虑对未充磁的各向同性磁铁(未充磁的第二磁铁7)以及未充磁的各向异性磁铁(未充磁的第一磁铁6)进行磁化的磁极方向,拉绕产生磁场的充磁磁轭(省略图示)。然后,使电流在该充磁磁轭中流动。在本实施方式中,对未充磁的各向同性磁铁(未充磁的第二磁铁7)以及未充磁的各向异性磁铁(未充磁的第一磁铁6)同时充磁。
67.详细而言,对第一磁铁6的主磁极磁铁61及其上部的第二磁铁7的区域沿上下方向(轴向a)施加磁场。由此,使主磁极磁铁61和位于其上部的第二磁铁7的区域充磁,得到如图3所示那样的、具有磁极的主磁极磁铁61和位于其上部的第二磁铁7的区域。因而,位于主磁极磁铁61的上部的第二磁铁7的区域沿第一方向、在该情况下沿上下方向被磁化。与沿上下方向施加磁场同时地,对第一磁铁6的副磁极磁铁62及其上部的第二磁铁7的区域沿与上下
方向不同的横向施加磁场。由此,使位于副磁极磁铁62及其上部的第二磁铁7的区域充磁,得到具有与周向c平行的朝向的磁极的副磁极磁铁62以及位于其上部的第二磁铁7的区域。这样,通过使未充磁的各向同性磁铁(未充磁的第二磁铁7)以及未充磁的各向异性磁铁(未充磁的第一磁铁6)同时充磁而实现充磁的高效化。此外,沿上述上下方向施加的磁场以及沿横向施加的磁场也可以是直线状、曲线状的磁场。另外,在上述充磁工序中,为了使充磁高效化,同时施加上下方向的磁场以及横向的磁场,但是也可以将其分为多次。
68.接着,进行定子配置工序(步骤s103)。详细而言,相对于配置有进行了充磁的各向异性磁铁(第一磁铁6)和各向同性磁铁(第二磁铁7)的转子框架32(转子3),在第一方向(上方向a2)配置定子5。此外,在定子5配置有装配了线圈53的定子铁芯52。
69.通过以上的流程图,制造旋转电机1。
70.根据本实施方式,能够得到以下的效果。
71.本实施方式的旋转电机1具备定子5和以旋转轴300为中心旋转的转子3,转子3具有与旋转轴300连接的转子框架32和配置于转子框架32的磁铁100。在此,在将从磁铁100朝向线圈53的方向设为第一方向(上方向a2)的情况下,磁铁100具有:多个第一磁铁6,具有各向异性,且至少沿第一方向被磁化;以及第二磁铁7,具有各向同性,且配置于第一磁铁6的第一方向上的正侧的端面。
72.根据该结构,通过具有各向异性且至少沿第一方向被磁化的多个第一磁铁6,能够实现磁通密度的提高。并且,通过具有各向同性且配置于第一磁铁6的第一方向上的正侧的端面的第二磁铁7,能够使第一磁铁6彼此的边界处的磁通密度分布平滑,能够使磁通密度分布接近正弦波,因此能够抑制齿槽转矩的产生。
73.在本实施方式的旋转电机1中,第一磁铁6具有主磁极磁铁61以及副磁极磁铁62,排列为海尔贝克阵列。
74.根据该结构,与ns阵列相比能够提高磁特性(转矩等)。
75.在本实施方式的旋转电机1中,第二磁铁7构成为环状。
76.根据该结构,能够提高第二磁铁7的面精度,能够减少与第一磁铁6的间隙。由此,能够使磁通密度分布接近正弦波。
77.在本实施方式的旋转电机1中,位于主磁极磁铁61的上部的第二磁铁7的区域沿第一方向被磁化。
78.根据该结构,由于在位于主磁极磁铁61的上部的第二磁铁7的区域,磁通朝向彼此相反的方向流动,因此能够抑制磁通交叉。由此,能够抑制磁通密度的降低。
79.在本实施方式的旋转电机1的制造方法中,具备各向异性磁铁配置工序、各向同性磁铁配置工序、充磁工序以及定子配置工序。然后,在充磁工序中,对未充磁的各向同性磁铁(未充磁的第二磁铁7)以及未充磁的各向异性磁铁(未充磁的第一磁铁6)同时充磁。由此,能够实现充磁的高效化。另外,在制造旋转电机1的情况下,通过执行各工序,能够高效地进行配置、充磁。
80.2.第二实施方式
81.图5是表示第二实施方式所涉及的旋转电机1a的磁铁100a的结构的剖视图。
82.本实施方式的旋转电机1a中的磁铁100a由第一实施方式的第一磁铁6和形态与第一实施方式不同的第二磁铁7a构成。其他结构与第一实施方式相同。此外,对相同的结构标
注相同的附图标记。
83.详细而言,本实施方式的第一磁铁6以与第一实施方式相同的阵列配置。不同点在于,本实施方式的第二磁铁7a由分割成多个的圆弧状磁铁71构成。另外,第二磁铁7a在位于第一磁铁6的第一主磁极磁铁611的上部的区域设置有被分割成圆弧状的情况下的端面。
84.在图5中,作为被分割成多个的第二磁铁7a的圆弧状磁铁71,从纸面的最左侧起,设为第一圆弧状磁铁711、第二圆弧状磁铁712、第三圆弧状磁铁713。此外,第二磁铁7a的分割数是通过均衡第一主磁极磁铁611的数量来确定的。此外,如图5所示,被分割的第一圆弧状磁铁711、第二圆弧状磁铁712、第三圆弧状磁铁713中的端面沿第一方向被磁化。
85.被分割的第二磁铁7a的圆弧状磁铁71(第一圆弧状磁铁711、第二圆弧状磁铁712、第三圆弧状磁铁713)中的磁通的流动与第一实施方式中的磁通的流动相同。
86.根据本实施方式,能够得到以下的效果。
87.在本实施方式的旋转电机1a中,第二磁铁7a由分割成多个的圆弧状磁铁71(第一圆弧状磁铁711、第二圆弧状磁铁712、第三圆弧状磁铁713等)构成。
88.根据该结构,与第一实施方式的第二磁铁7以圆环状构成为一体的情况相比,能够构成为分割成多个的圆弧状磁铁71,因此能够容易地制造第二磁铁7a。
89.在本实施方式的旋转电机1a中,被分割成多个的圆弧状磁铁71(第一圆弧状磁铁711、第二圆弧状磁铁712、第三圆弧状磁铁713等)的端面位于主磁极磁铁61(第一主磁极磁铁611)的上部,并且沿第一方向被磁化。
90.根据该结构,在位于主磁极磁铁61(第一主磁极磁铁611)的上部的圆弧状磁铁71(第一圆弧状磁铁711、第二圆弧状磁铁712、第三圆弧状磁铁713等)的端面,磁通朝向彼此相反的方向流动。因而,即使第二磁铁7a由被分割成多个的圆弧状磁铁71构成,也能够抑制磁通交叉,从而能够抑制磁通密度的降低。
91.3.第三实施方式
92.图6是表示第三实施方式所涉及的旋转电机1b的磁铁100b的结构的剖视图。
93.本实施方式的旋转电机1b中的磁铁100b由形态与第一实施方式不同的第一磁铁6b和与第一实施方式相同的第二磁铁7构成。其他结构与第一实施方式相同。此外,对相同的结构标注相同的附图标记。
94.详细而言,如图6所示,本实施方式的第一磁铁6b与第一实施方式同样地,以主磁极磁铁61与副磁极磁铁62b的阵列配置。不同点在于,本实施方式的副磁极磁铁62b构成为上部的高度比相邻的主磁极磁铁61的高度低。因此,在第一磁铁6b的副磁极磁铁62b与第二磁铁7之间形成有空间而分离。另外,能够使第一磁铁6b的主磁极磁铁61与第二磁铁7接触并紧贴地固定。
95.根据本实施方式,能够得到以下的效果。
96.在本实施方式的旋转电机1b中,第一磁铁6b的主磁极磁铁61与第二磁铁7接触,第一磁铁6b的副磁极磁铁62b与第二磁铁7之间分离。
97.通过该结构,主磁极磁铁61与第二磁铁7变得容易紧贴。即,由于间隙变窄,因此能够降低因间隙而产生的磁阻。然后,磁通容易从第二磁铁7向主磁极磁铁61的方向流动,能够提高磁通密度。
98.4.第四实施方式
99.图7是表示第四实施方式所涉及的旋转电机1c的磁铁100c的结构的剖视图。
100.本实施方式的旋转电机1c中的磁铁100c与第三实施方式的磁铁100b同样地构成。在本实施方式中,不同点在于,在第一磁铁6c的副磁极磁铁62c与第二磁铁7之间的分离的空间配置有软磁性部65。
101.作为软磁性部65,例如,使用电磁纯铁、硅铁、坡莫合金、电磁不锈钢等软磁性材料。
102.通过这样的结构,也能够使第一磁铁6c彼此的边界处的磁通密度分布平滑,能够使磁通密度分布接近正弦波,因此能够抑制齿槽转矩的产生。
103.5.第五实施方式
104.图8是表示第五实施方式所涉及的旋转电机1d的磁铁100d的结构的剖视图。
105.本实施方式的旋转电机1d中的磁铁100d与第一实施方式的磁铁100同样地由第一磁铁6(在本实施方式中为第一磁铁6d)和第二磁铁7构成。另外,第一磁铁6d与第一实施方式同样地由主磁极磁铁61和副磁极磁铁62构成。
106.与第一实施方式不同的结构在于,副磁极磁铁62在主磁极磁铁61的上下方向的位置配置于相对于主磁极磁铁61下降一级的位置。因此,转子框架32d在成为比配置有主磁极磁铁61的位置下降一级的位置的固定面321配置并固定有副磁极磁铁62。根据该结构,在副磁极磁铁62与第二磁铁7之间形成有间隙g1而分离。
107.通过将副磁极磁铁62配置于相对于主磁极磁铁61下降一级的位置,能够将相邻的主磁极磁铁61与副磁极磁铁62连接的区域设为互不相同的极。由此,能够抑制因相同的极彼此相对而欲相互减弱磁力的动作。换言之,能够抑制减磁。因此,即使在使用环境温度上升的情况下,也难以减磁,能够成为耐高温也较强的旋转电机1d。
108.6.第六实施方式
109.图9是表示第六实施方式所涉及的旋转电机1e的磁铁100e的结构的剖视图。
110.本实施方式的旋转电机1e中的磁铁100e与第五实施方式的磁铁100d同样地由第一磁铁6d(在本实施方式中为第一磁铁6e)和第二磁铁7构成。另外,第一磁铁6e与第五实施方式同样地由主磁极磁铁61和副磁极磁铁62构成。
111.此外,与第五实施方式的不同的点在于,在本实施方式中,在转子框架32e中,在固定面322配置副磁极磁铁62,在上升了一级的位置,隔着软磁性部66配置有主磁极磁铁61。
112.根据该结构,能够将相邻的主磁极磁铁61与副磁极磁铁62连接的区域设为互不相同的极,并且通过在主磁极磁铁61的下部配置与高低差相应的软磁性部66而使磁通与第五实施方式相比更容易流动。由此,能够进一步抑制减磁。
113.7.第七实施方式
114.图10是表示第七实施方式所涉及的旋转电机2的磁铁200的结构的剖视图。
115.本实施方式的旋转电机2与第一实施方式的旋转电机1构成为大致相同。不同点在于磁铁200的结构。如图10所示,磁铁200由第一磁铁8和第二磁铁7构成。第一磁铁8由平行各向异性的磁铁构成,与第一实施方式的主磁极磁铁61同样地,以交替排列有多个极性相反的磁铁81、82的、所谓ns阵列配置。第二磁铁7与第一实施方式同样地配置于第一磁铁8的第一方向(上方向a2)上的正侧的端面。第二磁铁7与第一实施方式同样地由各向同性的磁铁形成为圆环状。
116.此外,与第一实施方式的转子框架32相对应的本实施方式的转子框架33构成为辅助磁轭,详细而言由软磁性材料构成。通过将转子框架33构成为辅助磁轭而由磁铁200和转子框架33构成磁路,由此磁通流动。
117.根据本实施方式,能够得到以下的效果。
118.在本实施方式的旋转电机2中,磁铁200具有:多个第一磁铁8,具有各向异性,且至少沿第一方向(上方向a2)被磁化;以及第二磁铁7,具有各向同性,且配置于第一磁铁8的第一方向上的正侧的端面。然后,构成磁铁200的第一磁铁8以交替排列多个磁铁81、82的、所谓ns阵列配置。
119.根据该结构,通过具有各向异性而排列为ns阵列的多个第一磁铁8,虽然比不上第一实施方式的基于海尔贝克阵列的磁铁100,但是能够实现磁通密度的提高。并且,通过具有各向同性且配置于第一磁铁8的第一方向上的正侧的端面的第二磁铁7,能够使第一磁铁8彼此的边界处的磁通密度分布平滑,能够使磁通密度分布接近正弦波,因此能够抑制齿槽转矩的产生。
120.8.第八实施方式
121.图11是表示第八实施方式所涉及的旋转电机2a的磁铁200a的结构的剖视图。
122.本实施方式的旋转电机2a与第七实施方式的旋转电机2构成为大致相同。不同点在于磁铁200a的配置方法。其他结构与第七实施方式相同。对同样的结构标注相同的附图标记。
123.本实施方式的磁铁200a的第一磁铁8a的配置方式不同。详细而言,第一磁铁8a被配置为在相邻的磁铁81、82之间设置有间隙g2。
124.根据该结构,相邻的磁铁81、82分离,能够使第一磁铁8a彼此的边界处的磁通密度分布更加平滑,能够使磁通密度分布接近正弦波,因此能够抑制齿槽转矩。
125.另外,在第七实施方式的旋转电机2中,在抑制齿槽转矩的效果较小的情况下,如本实施方式的旋转电机2a那样,通过在相邻的磁铁81、82之间设置间隙g2而配置,另外,通过使用作为辅助磁轭的转子框架33等,能够在不使磁特性(转矩等)降低的情况下抑制齿槽转矩。
126.9.第九实施方式
127.图12是表示第九实施方式所涉及的旋转电机2b的磁铁200b的结构的剖视图。
128.本实施方式的旋转电机2b与第八实施方式的旋转电机2a构成为大致相同。本实施方式的与第八实施方式的不同点在于,在与第八实施方式中的间隙g2相对应的区域配置有由软磁性材料构成的辅助磁轭85。
129.在本实施方式的旋转电机2b中,磁铁81与磁铁82之间(与间隙g2相对应)构成为辅助磁轭85,从而由磁铁200b、辅助磁轭85、转子框架33构成磁路,由此使磁通容易流动,使磁特性(转矩等)提高。
130.上述第一实施方式至第九实施方式中的旋转电机1、1a~1e、2、2a、2b将磁铁100、100a~100e、200、200a、200b的结构应用于轴向间隙电机。但是,并不限定于此,例如,也可以应用于径向间隙电机。
131.以下,对应用于径向间隙电机的旋转电机10的实施方式进行说明。
132.10.第十实施方式
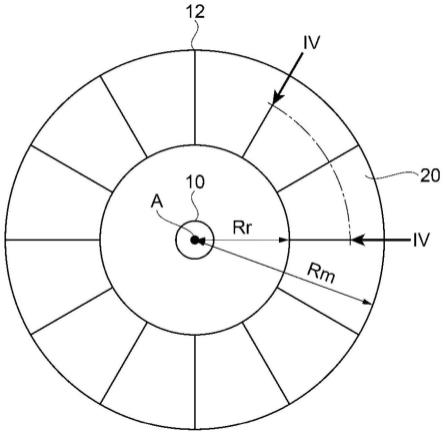
133.图13是表示第十实施方式所涉及的旋转电机10的结构的概略立体图。此外,在图13中,省略了转子框架38的图示。图14是表示旋转电机10的结构的概略俯视图。
134.本实施方式的旋转电机10构成为径向间隙电机。径向间隙电机是在后述的旋转轴310的径向r上在磁铁150与线圈(省略图示)之间具有间隙的电机。
135.如图13、图14所示,旋转电机10构成为,具备绕旋转轴310旋转的圆筒状的转子框架38,在转子框架38的径向r内侧具备磁铁150。旋转电机10成为所谓的外转子的结构。另外,在本实施方式的情况下,线圈是在磁铁150的内侧具有规定的间隙而配置于定子(省略图示)的结构。
136.磁铁150具备具有各向异性的第一磁铁9和具有各向同性的第二磁铁75。在此,在将从磁铁150朝向线圈的方向设为第一方向的情况下,第一方向与在径向r上朝向中心轴ax1(旋转轴310)的方向相对应。第二磁铁75配置于第一磁铁9的第一方向(朝向中心轴ax1的方向)上的正侧的端面。此外,在本实施方式中,正侧与线圈侧相对应。
137.此外,第一磁铁9作为环状的磁铁而构成为一体。第二磁铁75也作为环状的磁铁而构成为一体。另外,第一磁铁9、第二磁铁75由模具成形。
138.第一磁铁9具有主磁极磁铁91以及副磁极磁铁92。另外,第一磁铁9通过组合主磁极磁铁91和与主磁极磁铁91相邻的副磁极磁铁92而形成为环状。详细而言,第一磁铁9的主磁极磁铁91和副磁极磁铁92沿周向c以规定的节距交替地配置。主磁极磁铁91和副磁极磁铁92以所谓的海尔贝克阵列配置。
139.本实施方式的第一磁铁9(主磁极磁铁91和副磁极磁铁92)是nd-fe-b烧结磁铁,具有各向异性。本实施方式的第二磁铁75是铁氧体烧结磁铁。然后,第二磁铁75具有各向同性。
140.如图13、图14所示,主磁极磁铁91使用在朝向中心轴ax1的方向和径向r这两个方向上被磁化的磁铁。主磁极磁铁91具有在径向r上被磁化的第一主磁极磁铁911和在朝向中心轴ax1的方向上被磁化的第二主磁极磁铁912。副磁极磁铁92使用在周向c的两个方向上被磁化的磁铁。副磁极磁铁92具有向周向c右侧被磁化的第一副磁极磁铁921和向周向c左侧被磁化的第二副磁极磁铁922。此外,关于基于磁铁150和线圈的磁通的流动,与第一实施方式大致相同,因此省略说明。
141.根据本实施方式,能够得到以下的效果。
142.本实施方式的旋转电机10是径向间隙电机,磁铁150具有:多个第一磁铁9,具有各向异性,且至少沿第一方向(朝向中心轴ax1的方向)被磁化;以及第二磁铁75,具有各向同性,且配置于第一磁铁9的第一方向(朝向中心轴ax1的方向)上的正侧的端面。另外,旋转电机10成为外转子的结构。
143.根据该结构,通过具有各向异性且至少沿第一方向被磁化的多个第一磁铁9,能够实现磁通密度的提高。并且,通过具有各向同性且配置于第一磁铁9的第一方向上的正侧的端面的第二磁铁75,能够使第一磁铁9彼此的边界处的磁通密度分布平滑,能够使磁通密度分布接近正弦波,因此能够抑制齿槽转矩的产生。
144.另外,由于旋转电机10成为外转子的结构,因此在进行旋转的情况下,转子框架38能够相对于离心力支承磁铁150。另外,由于外转子的旋转电机10的直径比内转子的旋转电机的直径大,因此磁铁所占的量变大,能够产生磁力。另外,由于直径较大,因此能够产生相
应的转矩。
145.11.第十一实施方式
146.图15是表示第十一实施方式所涉及的旋转电机10a的结构的概略俯视图。此外,在图15中,放大示出主要部分的部分。
147.本实施方式的与第十实施方式的不同点在于第一磁铁9a的形状。本实施方式的磁铁150a由第一磁铁9a和第二磁铁75a构成。另外,第一磁铁9a由主磁极磁铁91a和副磁极磁铁92a构成。
148.在本实施方式中,如图15所示,构成第一磁铁9a的主磁极磁铁91a和副磁极磁铁92a在从沿中心轴ax1(参照图13、图14)的方向俯视时具有梯形形状。另外,在转子框架38a的内表面具备承接呈梯形形状的第一磁铁9a的面的承接面381。另外,在第二磁铁75a的外表面也与转子框架38a的承接面381同样地,具备承接呈梯形形状的第一磁铁9a的面的承接面751。
149.根据本实施方式的旋转电机10a,作为各向异性的第一磁铁9a的主磁极磁铁91a和副磁极磁铁92a呈截面梯形形状。由此,能够由平板构成主磁极磁铁91a和副磁极磁铁92a,从而能够实现制造的高效化。
150.12.第十二实施方式
151.图16是表示第十二实施方式所涉及的旋转电机10b的结构的概略俯视图。此外,在图16中,放大示出主要部分的部分。
152.本实施方式的与第十一实施方式的不同点在于第一磁铁9b的形状。本实施方式的磁铁150b由第一磁铁9b和第二磁铁75b构成。另外,第一磁铁9b由主磁极磁铁91b和副磁极磁铁92b构成。
153.在本实施方式中,如图16所示,构成第一磁铁9b的主磁极磁铁91b和副磁极磁铁92b在从沿中心轴ax1(参照图13、图14)的方向俯视时具有矩形形状。另外,在转子框架38b的内表面具备承接呈矩形形状的第一磁铁9b的面的承接面382。另外,在第二磁铁75b的外表面也与转子框架38b的承接面382同样地具备承接呈矩形形状的第一磁铁9b的面的承接面752。
154.本实施方式的第二磁铁75b通过注射成形而构成。作为注射成形的方法,在本实施方式中,将在转子框架38b配置有各向异性的矩形的第一磁铁9b的状态的材料设置于注射成形机,之后,将成为第二磁铁75b的材料注射成形。
155.作为成为第二磁铁75b的材料,在本实施方式中,使用塑料磁铁、即所谓的胶磁(
プラマグ
)。作为胶磁,是通过将作为磁铁的原料的金属粉末(铁氧体、钕、钐钴(
サマコバ
)、钐钴铁氮(
サマコバ
鉄窒素)等)与塑料材料混合而构成的。通过利用该材料进行注射成形而成形第二磁铁75b。在该情况下,所成形的第二磁铁75b具有各向同性。
156.另外,在本实施方式中,由于使用呈矩形形状的第一磁铁9b,因此在相邻的主磁极磁铁91b与副磁极磁铁92b的边界产生间隙。但是,在注射成形时,在该间隙中也填充胶磁而形成与第二磁铁75b相同的磁铁755。
157.根据本实施方式的旋转电机10b,作为各向异性的第一磁铁9b的主磁极磁铁91b和副磁极磁铁92b形成为截面矩形形状。由此,能够由平板构成主磁极磁铁91b和副磁极磁铁92b,从而能够实现制造的高效化。进而,由于第二磁铁75b是通过注射成形而构成的,因此
能够更容易地制造,另外,在因第一磁铁9b的矩形形状而产生的间隙中,也能够通过注射成形来填充塑料磁铁。
158.13.第十三实施方式
159.图17是表示第十三实施方式所涉及的机器人1000的结构的立体图。图18是简易地示出机器人1000的结构的图。
160.以下,参照图17以及图18,对机器人1000的结构进行说明。
161.如图17所示,机器人1000例如被用于各种工件(对象物)的搬运、组装、检查等各作业中。机器人1000具有基台1001、机械臂1100、驱动部1501、1502、1503、1504、1505、1506。
162.基台1001载置于水平的地板2000。此外,基台1001也可以不是载置于地板2000,而是载置于墙壁、天花板、架台等。
163.机械臂1100具备第一臂1010、第二臂1020、第三臂1030、第四臂1040、第五臂1050以及第六臂1060。在第六臂1060的顶端,能够拆装地安装未图示的末端执行器,能够通过该末端执行器把持工件等。
164.作为末端执行器,并没有特别限定,列举有把持工件的手、吸附工件的吸附头等。作为由末端执行器把持等的工件,并没有特别限定,例如,列举有电子元件、电子设备等。此外,在本实施方式中,将以第六臂1060为基准时的基台1001侧作为“基端侧”或者“根部侧”,将以基台1001为基准时的第六臂1060侧作为“顶端侧”。
165.机器人1000是基台1001、第一臂1010、第二臂1020、第三臂1030、第四臂1040、第五臂1050、第六臂1060从基端侧朝向顶端侧依次连结而成的单臂的六轴垂直多关节机器人。
166.第一臂1010~第六臂1060的长度各自并没有特别限定,能够适当设定。此外,机械臂1100所具有的臂的数量也可以是1~5根或者7根以上。另外,机器人1000也可以是水平多关节机器人,也可以是具备两个或者两个以上的机械臂1100的双臂机器人。
167.如图18所示,基台1001和第一臂1010经由关节1011连结。第一臂1010能够相对于基台1001以与铅垂轴平行的第一转动轴o1为转动中心而转动。第一臂1010通过具有电机1501m以及未图示的减速器的驱动部1501的驱动而转动。电机1501m产生使第一臂1010转动的推力。
168.第一臂1010和第二臂1020经由关节1021连结。第二臂1020能够相对于第一臂1010以与水平面平行的第二转动轴o2为转动中心而转动。第二臂1020通过电机1502m以及具有未图示的减速器的驱动部1502的驱动而转动。电机1502m产生使第二臂1020转动的推力。
169.第二臂1020和第三臂1030经由关节1031连结。第三臂1030能够相对于第二臂1020以与水平面平行的第三转动轴o3为转动中心而转动。第三臂1030通过电机1503m以及具有未图示的减速器的驱动部1503的驱动而转动。电机1503m产生使第三臂1030转动的推力。
170.第三臂1030和第四臂1040经由关节1041连结。第四臂1040能够相对于第三臂1030以与第三臂1030的中心轴平行的第四转动轴o4为转动中心而转动。第四臂1040通过电机1504m以及具有未图示的减速器的驱动部1504的驱动而转动。电机1504m产生使第四臂1040转动的推力。
171.第四臂1040和第五臂1050经由关节1051连结。第五臂1050能够相对于第四臂1040以与第四臂1040的中心轴正交的第五转动轴o5为转动中心而转动。第五臂1050通过电机1505m以及具有未图示的减速器的驱动部1505的驱动而转动。电机1505m产生使第五臂1050
转动的推力。
172.第五臂1050与第六臂1060经由关节1061连结。第六臂1060能够相对于第五臂1050以与第五臂1050的顶端部的中心轴平行的第六转动轴o6为转动中心而转动。第六臂1060通过电机1506m以及具有未图示的减速器的驱动部1506的驱动而转动。电机1506m产生使第六臂1060转动的推力。
173.在这些电机1501m~1506m中的至少一个中,使用由上述实施方式的轴向间隙电机构成为海尔贝克阵列的旋转电机1、1a~1e、由轴向间隙电机构成为ns阵列的旋转电机2、2a、2b。
174.在驱动部1501~1506设置有未图示的角度传感器。作为这些角度传感器,例如,列举有旋转编码器等各种编码器。角度传感器检测驱动部1501~1506的电机1501m~1506m或者减速器的输出轴的转动角度。
175.驱动部1501~1506以及角度传感器分别与未图示的机器人控制装置电连接。机器人控制装置独立地控制驱动部1501~1506的动作。
176.根据本实施方式,能够得到以下的效果。
177.本实施方式的机器人1000具备上述实施方式所涉及的旋转电机1、1a~1e、2、2a、2b。另外,机器人1000具备由这些旋转电机1、1a~1e、2、2a、2b驱动的与被驱动构件相对应的机械臂1100。
178.在这样的机器人1000中,通过使用抑制齿槽转矩的产生的旋转电机1、1a~1e、2、2a、2b来驱动被驱动构件,能够使机械臂1100进行平滑的动作,并且能够容易地实现机器人1000的小型化以及设计自由度的提高。
179.在本实施方式的机器人1000中,例如在使用旋转电机1的情况下,由于是轴向间隙电机,因此能够将旋转轴300形成为中空,能够利用中空使配线通过旋转轴300。特别是在被驱动构件是成为机械臂1100的基端侧的臂(或者根部侧的臂)的第一臂1010的情况下,由于根部侧的配线根数较多,因此能够提高配线效率。另外,通过一并使用旋转电机1,与以往相比能够实现机器人1000的高输出化。
180.14.变形例1
181.在第一实施方式中,将环氧树脂等粘接剂用作磁铁100的连接材料。但是,并不限定于此,例如,也可以在环氧树脂等粘接剂中混合黑色氧化铁等软磁性材料的粉末而用作软磁性材料的填料。这在其他实施方式中也是同样的。
182.15.变形例2
183.在第一实施方式中,对未充磁的各向同性磁铁(未充磁的第二磁铁7)以及未充磁的各向异性磁铁(未充磁的第一磁铁6)同时充磁。但是,并不限定于此,也可以通过不同的工序对未充磁的各向同性磁铁(未充磁的第二磁铁7)和未充磁的各向异性磁铁(未充磁的第一磁铁6)充磁。
184.16.变形例3
185.在第十实施方式的旋转电机10中,对将基于海尔贝克阵列的磁铁150应用于径向间隙电机的例子进行了说明。但是,并不限定于此,作为旋转电机,也可以将基于ns阵列的磁铁应用于径向间隙电机。在该情况下,在转子框架中需要具备磁轭的功能。另外,在相邻的磁铁之间产生间隙等的情况下,对于间隙,可以在保持空的状态下利用树脂模具进行填
充、利用磁铁模具进行填充、利用软磁性材料进行填充等任意方法来应对。
186.17.变形例4
187.在第十实施方式的旋转电机10中,使用外转子的结构。但是,并不限定于此,作为旋转电机,也可以采用内转子的结构。此外,在内转子的结构中,线圈配置于磁铁150的外侧。
188.18.变形例5
189.第十实施方式~第十二实施方式的旋转电机10、10a、10b在第一磁铁9、9a、9b中,使用仅在一个方向上被磁化的平行各向异性磁铁。但是,并不限定于此,能够使用在径向(例如径向r)上被磁化的径向各向异性磁铁。
190.19.变形例6
191.在第十二实施方式的旋转电机10b中,第二磁铁75b是通过注射成形而构成的。但是,并不限定于此,能够使用一体地构成为环状的磁铁的第二磁铁。在该情况下,在相邻的主磁极磁铁91b与副磁极磁铁92b的边界产生间隙。但是,该间隙可以利用软磁性材料的填料来填埋。
192.20.变形例7
193.第一实施方式~第九实施方式的旋转电机1、1a~1e、2、2a、2b是采用了所谓的1转子1定子构造的电机。但是,并不限定于此,也能够应用于2定子1转子构造、2转子1定子构造等任意构造。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。