1.本发明涉及虚拟智能医疗领域,具体地说是一种基于不共面特征点匹配的手术导航定位方法。
背景技术:
2.目前,现有手术导航系统在手术中应用,将包含患者的三维模型虚拟图像显示在真实环境下患者的病灶位置,采取的技术手段主要依赖光学定位系统,通过光学定位系统同时追踪定位标记物和显示设备的位置坐标,再将包含患者病灶的三维模型按照坐标转换的对应关系在显示设备中显示,最终实现包含患者病灶的三维模型准确地显示在患者病灶的实际位置,为医生术前规划和术中导航提供辅助作用;现有手术导航系统在实际应用中存在以下缺陷:1、定位方法为:在患者病灶区域放置定位标记物(多数为针式红外标记物),通过获取每个定位标记物传递的位置信号来确定病灶的实际位置,再将病灶的实际位置与虚拟的患者病灶三维模型的空间位置建立对应关系,进而确定虚拟的患者病灶三维模型的空间位置,这种方法在实际应用中不便于操作,一是要准确地在患者身上选取病灶区域;二是要保持定位标记物在人身体上的相对位置不变,导致定位标记物有一些是采用在患者身体上植入的方式固定,还有一些则是通过采集患者身体切口内器官或组织的位置信息来实现定位,这些方式都会对患者造成一定损伤,增加手术风险和患者的心理痛苦。
3.2、定位的精准程度取决的因素较多,对环境的依赖性比较强,定位精确度不够稳定;以光学定位系统为例,其定位的精准度主要取决于对定位标记物和显示设备的位置坐标追踪的准确性,而追踪的准确性又与定位标记物的载体本身,数量,位置,角度,环境光线,运动状态有关,与显示设备的相对位置,移动情况及环境光线有关,以上综合因素导致手术导航系统定位的精确度不够稳定。
技术实现要素:
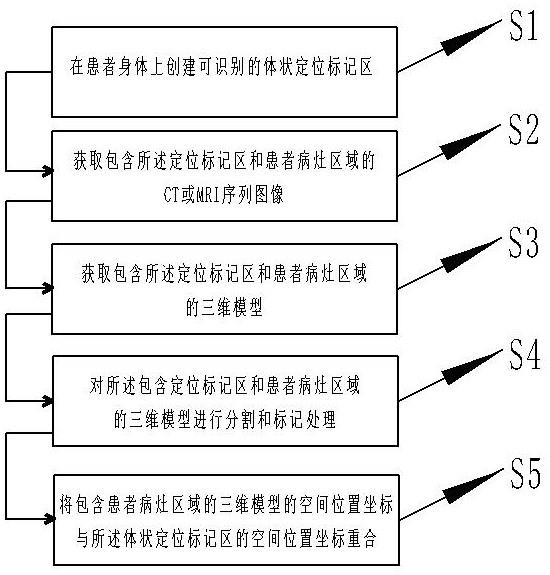
4.本发明提供一种基于不共面特征点匹配的手术导航定位方法,目的是解决目前手术导航系统存在的定位精准度稳定性不高,对人体有切口损害的问题,本发明为解决上述问题所采用的技术方案如下:基于不共面特征点匹配的手术导航定位方法,包括以下步骤:s1:在患者身体上创建可识别的体状定位标记区;s2:获取包含所述定位标记区和患者病灶区域的ct或mri序列图像;s3:获取包含所述定位标记区和患者病灶区域的三维模型;s4:对所述包含定位标记区和患者病灶区域的三维模型进行分割和标记处理,获得与所述定位标记区有对应的关联标记的包含患者病灶区域的三维模型;s5:识别患者身体上建立的体状定位标记区,获取所述体状定位标记区的空间位置坐标,将包含患者病灶区域的三维模型的空间位置坐标与所述体状定位标记区的空间位
置坐标重合,实现患者病灶区域三维模型与患者病灶区域匹配重合。
5.进一步的,所述体状定位标记区由至少四个定位标记点组成,所述定位标记点中至少有一个点与其他三个定位标记点所形成的平面不在一个平面内。
6.进一步的,在患者身体上创建可识别的体状定位标记区的方法如下:s11:在患者身体上选择至少四个定位标记点,在每个定位标记点上固定不同内容的定位标记信息;s12:逐个扫描定位标记信息,获取所述定位标记信息的内容以及与其他定位标记点之间的空间相对位置;s13:为步骤s12获取的扫描后的定位标记信息分配唯一标识,得到具有唯一标识的定位标记信息并存储。
7.对所述包含定位标记区和患者病灶区域的三维模型进行分割和标记处理的方法如下:s41:建立患者的三维模型数据库;s42:将所述包含定位标记信息的定位标记点从三维模型中逐个分割处理,成为单个的定位标记点的三维模型;s43:逐个为步骤s42获取的单个的定位标记点的三维模型分配与其对应的所述定位标记信息一致的唯一标识,并储存在步骤s41建立的三维模型数据库中;s44:对包含患者病灶区域的三维模型按照患者病灶区域的包含结构关系分割为至少四个独立的患者病灶局部区域的三维模型;s45:将步骤s44获取的所述患者病灶局部区域的三维模型与步骤s43获取的具有唯一标识的所述单个的定位标记点的三维模型建立对应的关联标记,并储存在步骤s41建立的三维模型数据库中,通过识别所述单个的定位标记点的三维模型的空间位置坐标,就可以确定与之对应的所述患者病灶局部区域的三维模型的空间位置坐标。
8.进一步的,所述步骤s5的实现过程如下:s51:按照所述患者病灶局部区域三维模型的包含结构关系从大到小的顺序,依次扫描与其对应的患者身上的包含定位标记信息的定位标记点,获取所述定位标记信息的唯一标识和空间位置坐标;s52:遍历所述三维模型数据库中储存的所有三维模型,识别出与步骤s51获取的所述定位标记信息的唯一标识一致的单个的定位标记点的三维模型;s53:设定步骤s52获得的所述单个的定位标记点的三维模型中心点的空间位置坐标等于所述定位标记信息中心点的空间位置坐标;s54:将所述患者病灶局部区域的三维模型移动到其空间位置坐标的位置;s55:重复步骤s51、步骤s52、步骤s53,步骤s54,直至患者病灶局部区域的三维模型全部移动完毕为止;步骤s55执行完毕后,所述包含患者病灶区域的三维模型的空间位置坐标即可确定,并与患者实际病灶区域的空间位置坐标重合。
9.进一步的,所述独立的患者病灶局部区域的三维模型至少包含独立的第一局部区域,独立的第二局部区域,独立的第三局部区域,独立的第四局部区域;所述独立的第一局部区域包含第二局部区域、第三局部区域、第四局部区域;
所述独立的第二局部区域包含第三局部区域、第四局部区域;所述独立的第三局部区域包含第四局部区域;所述独立的第四局部区域为第四局部区域。
10.进一步的,所述定位标记信息的内容由至少带三个角点,与背景对比具有突出颜色特征的图案组成。
11.进一步的,每个定位标记信息的图案与其他定位标记信息的图案相比,至少存在三个空间位置坐标不同的角点。
12.进一步的,所述角点包括线与线相交的交点或线的端点。
13.优选的,所述定位标记信息的图案为不同内容随机生成的二维码图案。
附图说明
14.附图1为本发明的步骤流程示意图;附图2为本发明体状定位标记区内包含四个定位标记点的结构示意图;附图3为本发明体状定位标记区内包含五个定位标记点的结构示意图;附图4,为本发明创建可标识的体状定位标记区的流程图;附图5,为本发明定位标记信息的角点包含线与线相交的交点的示意图;附图6,为本发明定位标记信息的角点包含线的端点的示意图;附图7,为本发明定位标记信息包含二维码图案的示意图;附图8,为本发明包含定位标记区和患者病灶区域的三维模型进行分割和标记处理的步骤流程图;附图9,为本发明包含患者病灶区域的三维模型分割结构关系的层级结构示意图;附图10,为本发明对应的关联标记建立方法逻辑图;附图11,为本发明定位标记点的三维模型与患者病灶局部区域的三维模型建立对应的关联标记关系的示意图;附图12,为本发明步骤s5实现的步骤流程图。
15.有益效果1、本发明所采用的定位方法与现有技术中的定位方法有本质区别,本发明是通过获取患者身体上固定的体状定位标记区内每个定位标记信息的内容和空间位置坐标,来确定虚拟的定位标记信息三维模型的空间位置坐标,并通过为虚拟的定位标记信息三维模型与患者病灶局部区域三维模型建立的对应关联标记关系,确定患者病灶局部区域三维模型的空间位置坐标,实现患者病灶区域三维模型与患者实际病灶位置重合;本方法不需要在患者身上准确选取病灶区域,体状定位标记区可以选择在便于定位和操作的区域即可,定位过程操作简便;体状定位标记区内的定位标记信息采用粘贴的方式固定在患者身体上,不会对患者造成额外的损伤,降低手术风险。
16.2、影响本方法定位精准度的制约因素比较少,一个是固定在患者身体上的体状定位标记区的位置要相对固定,所包含的定位标记信息要具有可识别性和唯一性;另一个是用于识别定位标记信息的内容及空间位置坐标并显示患者病灶区域三维模型的显示设备;这两个制约因素不会受手术室内光线与背景环境的影响,也不会存在设备之间相互影响的电磁耦合干扰,因此,采用此方法实现手术导航定位的精准度的稳定性会明显提高。
17.3、本方法的实现所需的硬件设备较少,只要同时满足识别和获取定位标记信息的内容和空间位置坐标,显示患者病灶区域三维模型即可,定位标记信息也可以使用现有手术通用材料及简单的方法来实现即可,总体成本消耗较低,可以有效降低医疗成本。
具体实施方式
18.下面将参考附图并结合实施例来详细说明本发明。
19.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.附图1为本发明的步骤流程示意图,结合附图1说明,基于不共面特征点匹配的手术导航定位方法,包括以下步骤:s1:在患者身体上创建可识别的体状定位标记区;s2:获取包含所述定位标记区和患者病灶区域的ct或mri序列图像;s3:获取包含所述定位标记区和患者病灶区域的三维模型;s4:对所述包含定位标记区和患者病灶区域的三维模型进行分割和标记处理,获得与所述定位标记区有对应的关联标记的包含患者病灶区域的三维模型;s5:识别患者身体上建立的体状定位标记区,获取所述体状定位标记区的空间位置坐标,将包含患者病灶区域的三维模型的空间位置坐标与所述体状定位标记区的空间位置坐标重合,实现患者病灶区域三维模型与患者病灶区域匹配重合。
21.附图2为本发明体状定位标记区内包含四个定位标记点的结构示意图;附图3为本发明体状定位标记区内包含五个定位标记点的结构示意图;结合附图2和附图3,说明本发明体状定位标记区的具体实施方式;所述体状定位标记区由至少四个定位标记点组成,所述定位标记点中至少有一个点与其他三个定位标记点所形成的平面不在一个平面内。
22.附图2所示的体状定位标记区包含四个定位标记点,分别为第一定位标记点a1,第二定位标记点b1,第三定位标记点c1和第四定位标记点d1,所述第四定位标记点d1与所述第一定位标记点a1,所述第二定位标记点b1,所述第三定位标记点c1所组成的平面a1 b1 c1不在一个平面内,所述第四定位标记点d1分别与所述第一定位标记点a1,所述第二定位标记点b1组成平面d1 a1 b1,与所述第一定位标记点a1,所述第三定位标记点c1组成平面d1 a1 c1,与所述第二定位标记点b1,所述第三定位标记点c1组成平面d1 b1 c1,四个定位标记点a1,b1,c1和d1共同组成了四面体状定位标记区;附图3所述的体状定位标记区包含五个定位标记点,分别为第一定位标记点a2,第二定位标记点b2,第三定位标记点c2,第四定位标记点d2和第五定位标记点e2,则这五点定位标记点共同组成了五面体状定位标记区。
23.附图4为创建可标识的体状定位标记区的流程图;结合附图4,进一步的,在患者身体上创建可识别的体状定位标记区的方法如下:
步骤s11:在患者身体上选择至少四个定位标记点,在每个定位标记点上固定不同内容的定位标记信息;所述的四个定位标记点可以选取在患者病灶区域,或者是非病灶区域;所述定位标记信息可以粘贴在患者身体上;附图5、附图6、附图7为定位标记信息的示意图;结合附图5,附图6,附图7进一步说明步骤s11所述的定位标记信息,所述定位标记信息的内容由至少带三个角点,与背景对比具有突出颜色特征的图案组成;所述角点包括线与线相交的交点或线的端点;每个定位标记信息的图案与其他定位标记信息的图案相比,至少存在三个空间位置坐标不同的角点。
24.优选的,所述定位标记信息的图案为不同内容随机生成的二维码图案。
25.优选的,所述定位标记信息的图案区域不得小于5cm。
26.对于包含四个定位标记点的四面体状定位标记区来说,通过步骤s11会得到与四个定位标记点相对应的定位标记信息,分别为第一定位标记信息a1’,第二定位标记信息b1’,第三定位标记信息c1’和第四定位标记信息d1’。
27.对于包含五个定位标记点的五面体状定位标记区来说,通过步骤s11会得到与五个定位标记点相对应的定位标记信息,分别为第一定位标记信息a2’,第二定位标记信息b2’,第三定位标记信息c2’,第四定位标记信息d2’和第五定位标记信息e2’。
28.步骤s12:逐个扫描定位标记信息,获取所述定位标记信息的内容以及与其他定位标记点之间的空间相对位置;对于包含四个定位标记点的四面体状定位标记区来说,逐个扫描第一定位标记信息a1’,第二定位标记信息b1’,第三定位标记信息c1’和第四定位标记信息d1’,获取第一定位标记信息a1’的图案内容,和第一定位标记信息a1’分别与第二定位标记信息b1’,第三定位标记信息c1
’ꢀ
,第四定位标记信息d1’之间的空间相对位置;获取第二定位标记信息b1’的图案内容,和第二定位标记信息b1’分别与第一定位标记信息a1’,第三定位标记信息c1
’ꢀ
,第四定位标记信息d1’之间的空间相对位置;获取第三定位标记信息c1’的图案内容,和第三定位标记信息c1’分别与第一定位标记信息a1’,第二定位标记信息b1
’ꢀ
,第四定位标记信息d1’之间的空间相对位置;获取第四定位标记信息d1’的图案内容,和第四定位标记信息d1’分别与第一定位标记信息a1’,第二定位标记信息b1
’ꢀ
,第三定位标记信息c1’之间的空间相对位置;对于包含五个定位标记点的五面体状定位标记区来说,扫描和获取的内容与包含四个定位标记点的四面体状定位标记区一致。
29.步骤s13:为步骤s12获取的扫描后的定位标记信息分配唯一标识,得到具有唯一标识的定位标记信息并存储。
30.所述唯一标识要具有唯一性;所述唯一标识可以被计算机程序所识别;所述唯一标识在内容组成上可以由数字或字母或符号或上述任意三种的字符混合组成;对于包含四个定位标记点的四面体状定位标记区来说,
为第一定位标记信息a1’分配一个唯一标识a,为第二定位标记信息b1
’ꢀ
分配一个唯一标识b,为第三定位标记信息c1
’ꢀ
分配一个唯一标识c,为第四定位标记信息d1’分配一个唯一标识d;结合附图8说明,进一步的,对所述包含定位标记区和患者病灶区域的三维模型进行分割和标记处理的方法如下:s41:建立患者的三维模型数据库;s42:将所述包含定位标记信息的定位标记点从三维模型中逐个分割处理,成为单个的定位标记点的三维模型;所述单个的定位标记点的三维模型是指每个定位标记点具有独立的空间位置坐标,所述的空间位置坐标是指每个定位标记点的中心坐标;对于包含四个定位标记点的四面体状定位标记区来说,通过步骤s42会得到四个单个的定位标记点的三维模型,分别为第一定位标记点a1的三维模型,第二定位标记点b1的三维模型,第三定位标记点c1的三维模型和第四定位标记点d1的三维模型;对于包含五个定位标记点的五面体状定位标记区来说,通过步骤s42会得到五个单个的定位标记点的三维模型,分别为第一定位标记点a2的三维模型,第二定位标记点b2的三维模型,第三定位标记点c2的三维模型,第四定位标记点d2的三维模型和第五定位标记点e2的三维模型;s43:逐个为步骤s42获取的单个的定位标记点的三维模型分配与其对应的所述定位标记信息一致的唯一标识,并储存在步骤s41建立的三维模型数据库中;对于包含四个定位标记点的四面体状定位标记区来说,为第一定位标记点a1的三维模型分配第一定位标记信息a1’对应的唯一标识a;为第二定位标记点b1的三维模型分配第二定位标记信息b1
’ꢀ
对应的唯一标识b;为第三定位标记点c1的三维模型分配第三定位标记信息c1
’ꢀ
对应的唯一标识c;为第四定位标记点d1的三维模型分配第四定位标记信息d1’对应的唯一标识d;s44:对包含患者病灶区域的三维模型按照患者病灶区域的包含结构关系分割为至少四个独立的患者病灶局部区域的三维模型;附图9为包含患者病灶区域的三维模型分割结构关系的层级结构示意图;结合附图9进一步说明包含患者病灶区域的三维模型的包含结构关系分割的至少四个独立的患者病灶局部区域的三维模型;本发明所述的独立是指拥有独立的空间位置坐标;所述独立的患者病灶局部区域的三维模型至少包含独立的第一局部区域,独立的第二局部区域,独立的第三局部区域,独立的第四局部区域;所述独立的第一局部区域包含第二局部区域、第三局部区域、第四局部区域;所述独立的第二局部区域包含第三局部区域、第四局部区域;所述独立的第三局部区域包含第四局部区域;所述独立的第四局部区域为第四局部区域;s45:将步骤s44获取的所述患者病灶局部区域的三维模型与步骤s43获取的具有唯一标识的所述单个的定位标记点的三维模型建立对应的关联标记,并储存在步骤s41建立的三维模型数据库中,通过识别所述单个的定位标记点的三维模型的空间位置坐标,就
可以确定与之对应的所述患者病灶局部区域的三维模型的空间位置坐标;对所述包含定位标记区和患者病灶区域的三维模型进行分割后,不改变单个的定位标记点的三维模型与所述患者病灶局部区域的三维模型的空间相对位置关系;结合附图10,进一步说明所述对应的关联标记的建立方法:为所述单个的定位标记点的三维模型选定一个所述患者病灶局部区域的三维模型;获取所述单个的定位标记点的三维模型和与其对应的所述患者病灶局部区域的三维模型之间的空间位置坐标差值;所述空间位置坐标差值为所述单个的定位标记点的三维模型中心点的空间位置坐标和与其对应的所述患者病灶局部区域的三维模型中心点的空间位置坐标形成的差值;为所述患者病灶局部区域的三维模型中心点的空间位置坐标赋值,即所述患者病灶局部区域的三维模型中心点的空间位置坐标等于所述单个的定位标记点的三维模型中心点的实际坐标与所述空间位置坐标差值之和;通过上述方法完成所有单个的定位标记点的三维模型与所述患者病灶局部区域的三维模型对应的关联标记。
31.结合附图11,进一步说明所述单个的定位标记点的三维模型与所述患者病灶局部区域的三维模型建立对应的关联标记关系;对于包含四个定位标记点的四面体状定位标记区来说,所述第一定位标记点a1的三维模型与所述独立的第一局部区域的三维模型建立对应的关联标记,通过识别第一定位标记点a1的三维模型的空间位置坐标,就可以确定与之对应的所述独立的第一局部区域的三维模型的空间位置坐标;所述第二定位标记点b1的三维模型与所述独立的第二局部区域的三维模型建立对应的关联标记,通过识别第二定位标记点b1的三维模型的空间位置坐标,就可以确定与之对应的所述独立的第二局部区域的三维模型的空间位置坐标;所述第三定位标记点c1的三维模型与所述独立的第三局部区域的三维模型建立对应的关联标记,通过识别第三定位标记点c1的三维模型的空间位置坐标,就可以确定与之对应的所述独立的第三局部区域的三维模型的空间位置坐标;所述第四定位标记点d1的三维模型与所述独立的第四局部区域的三维模型建立对应的关联标记,通过识别第四定位标记点d1的三维模型空间位置坐标,就可以确定与之对应的所述独立的第四局部区域的三维模型的空间位置坐标。
32.结合附图12,进一步说明所述步骤s5的实现过程:s51:按照所述患者病灶局部区域三维模型的包含结构关系从大到小的顺序,依次扫描与其对应的患者身上的定位标记点的定位标记信息,获取所述定位标记信息的唯一标识和空间位置坐标;对于包含四个定位标记点的四面体状定位标记区来说:按照所述患者病灶局部区域三维模型的包含结构关系从大到小的顺序,依次为第一局部区域的三维模型,第二局部区域的三维模型,第三局部区域的三维模型,第四局部区域的三维模型;识别出与第一局部区域的三维模型对应的患者身上的定位标记点为第一定位标
记点a1;扫描第一定位标记信息a1’,获取所述第一定位标记信息a1’的唯一标识a和空间位置坐标a1’(xa1,ya1,za1);s52:遍历所述三维模型数据库中储存的所有三维模型,识别出与步骤s51获取的所述定位标记信息的唯一标识一致的单个的定位标记点的三维模型;对于步骤s51获取的所述第一定位标记信息a1’的唯一标识a,在三维模型数据库中识别出与唯一标识a一致的第一定位标记点a1的三维模型;s53:设定步骤s52获得的所述单个的定位标记点的三维模型中心点的空间位置坐标等于所述定位标记信息中心点的空间位置坐标;并将所述单个的定位标记点的三维模型移动到其空间位置坐标的位置;设定第一定位标记点a1的三维模型的中心点空间位置坐标等于第一定位标记信息a1’中心点的空间位置坐标,即(xa1,ya1,za1);s54:将所述患者病灶局部区域的三维模型移动到其空间位置坐标的位置;将独立的第一局部区域的三维模型移动到其空间位置坐标的位置,所述独立的第一局部区域的三维模型的空间位置坐标为:第一定位标记点a1的三维模型的中心点空间位置坐标,和其与第一局部区域的三维模型中心点的空间位置坐标差值的和;s55:重复步骤s51、步骤s52、步骤s53,步骤s54,直至患者病灶局部区域的三维模型全部移动完毕为止,过程如下:识别出与第二局部区域的三维模型对应的患者身上的定位标记点为第二定位标记点b1;扫描第二定位标记信息b1’,获取所述第二定位标记信息b1
’ꢀ
的唯一标识b和空间位置坐标b1’(xb1,yb1,zb1);对于步骤s51获取的所述第二定位标记信息b1’的唯一标识b,在三维模型数据库中识别出与唯一标识b一致的第二定位标记点b1的三维模型;设定步骤s52获取的第二定位标记点b1的三维模型的中心点空间位置坐标等于第二定位标记信息b1’中心点的空间位置坐标,即(xb1,yb1,zb1);将第二定位标记点b1的三维模型移动到其空间位置坐标的位置,即(xb1,yb1,zb1);将与第二定位标记点b1的三维模型建立对应的关联标记关系的,独立的第二局部区域的三维模型,移动到其空间位置坐标的位置;识别出与第三局部区域的三维模型对应的患者身上的定位标记点为第三定位标记点c1;扫描第三定位标记信息c1’,获取所述第三定位标记信息c1’的唯一标识c和空间位置坐标c1’(xc1,yc1,zc1);对于步骤s51获取的所述第三定位标记信息c1’的唯一标识c,在三维模型数据库中识别出与唯一标识c一致的第三定位标记点c1的三维模型;设定步骤s52获取的第三定位标记点c1的三维模型的中心点空间位置坐标等于第三定位标记信息c1’中心点的空间位置坐标,即(xc1,yc1,zc1);将第三定位标记点c1的三维模型移动到其空间位置坐标的位置,即(xc1,yc1,
zc1);将与第三定位标记点c1的三维模型建立对应的关联标记关系的,独立的第三局部区域的三维模型,移动到其空间位置坐标的位置;识别出与第四局部区域的三维模型对应的患者身上的定位标记点为第四定位标记点d1;扫描第四定位标记信息d1’;获取所述第四定位标记信息d1’的唯一标识d和空间位置坐标d1’(xd1,yd1,zd1);对于步骤s51获取的所述第四定位标记信息d1’的唯一标识d,在三维模型数据库中识别出与唯一标识d一致的第四定位标记点d1的三维模型;设定步骤s52获取的第四定位标记点d1的三维模型的中心点空间位置坐标等于第四定位标记信息d1’中心点的空间位置坐标,即(xd1,yd1,zd1);将第四定位标记点d1的三维模型移动到其空间位置坐标的位置,即(xd1,yd1,zd1);将与第四定位标记点d1的三维模型建立对应的关联标记关系的,独立的第四局部区域的三维模型,移动到其空间位置坐标的位置;步骤s55执行完毕后, 所述单个的定位标记点的三维模型中心点的空间位置坐标即可确定,进而可以确定,与所述单个的定位标记点的三维模型,建立对应的关联标记关系的,包含患者病灶区域的三维模型的空间位置坐标,因此,可以通过所述单个的定位标记点的三维模型与患者身上实际的定位标记点的重合匹配,实现所述包含患者病灶区域的三维模型与患者实际病灶区域的重合匹配。
33.本实施例用来实现扫描所述定位标记信息所采用的装置可以是混合现实头显设备或增强现实头显设备或智能手机或平板电脑;优选为混合现实眼镜。
34.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
