技术特征:
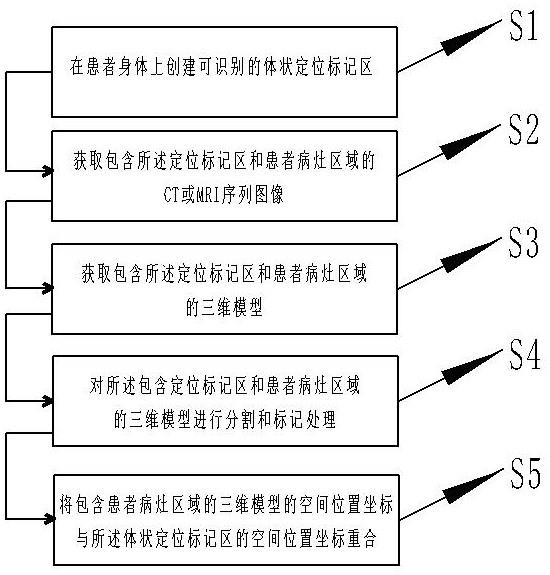
1.基于不共面特征点匹配的手术导航定位方法,其特征在于,包括以下步骤:s1:在患者身体上创建可识别的体状定位标记区;s2:获取包含所述定位标记区和患者病灶区域的ct或mri序列图像;s3:获取包含所述定位标记区和患者病灶区域的三维模型;s4:对所述包含定位标记区和患者病灶区域的三维模型进行分割和标记处理,获得与所述定位标记区有对应的关联标记的包含患者病灶区域的三维模型;s5:识别患者身体上建立的体状定位标记区,获取所述体状定位标记区的空间位置坐标,将包含患者病灶区域的三维模型的空间位置坐标与所述体状定位标记区的空间位置坐标重合,实现患者病灶区域三维模型与患者病灶区域匹配重合。2.根据权利要求1所述的基于不共面特征点匹配的手术导航定位方法,其特征在于,所述体状定位标记区由至少四个定位标记点组成,所述定位标记点中至少有一个点与其他三个定位标记点所形成的平面不在一个平面内。3.根据权利要求2所述的基于不共面特征点匹配的手术导航定位方法,其特征在于,在患者身体上创建可识别的体状定位标记区的方法如下:s11:在患者身体上选择至少四个定位标记点,在每个定位标记点上固定不同内容的定位标记信息;s12:逐个扫描定位标记信息,获取所述定位标记信息的内容以及与其他定位标记点之间的空间相对位置;s13:为步骤s12获取的扫描后的定位标记信息分配唯一标识,得到具有唯一标识的定位标记信息并存储。4.根据权利要求3所述的基于不共面特征点匹配的手术导航定位方法,其特征在于,对所述包含定位标记区和患者病灶区域的三维模型进行分割和标记处理的方法如下:s41:建立患者的三维模型数据库;s42:将所述包含定位标记信息的定位标记点从三维模型中逐个分割处理,成为单个的定位标记点的三维模型;s43:逐个为步骤s42获取的单个的定位标记点的三维模型分配与其对应的所述定位标记信息一致的唯一标识,并储存在步骤s41建立的三维模型数据库中;s44:对包含患者病灶区域的三维模型按照患者病灶区域的包含结构关系分割为至少四个独立的患者病灶局部区域的三维模型;s45:将步骤s44获取的所述患者病灶局部区域的三维模型与步骤s43获取的具有唯一标识的所述单个的定位标记点的三维模型建立对应的关联标记,并储存在步骤s41建立的三维模型数据库中,通过识别所述单个的定位标记点的三维模型的空间位置坐标,就可以确定与之对应的所述患者病灶局部区域的三维模型的空间位置坐标。5.根据权利要求4所述的基于不共面特征点匹配的手术导航定位方法,其特征在于,所述步骤s5的实现过程如下:s51:按照所述患者病灶局部区域三维模型的包含结构关系从大到小的顺序,依次扫描与其对应的患者身上的包含定位标记信息的定位标记点,获取所述定位标记信息的唯一标识和空间位置坐标;s52:遍历所述三维模型数据库中储存的所有三维模型,识别出与步骤s51获取的所述
定位标记信息的唯一标识一致的单个的定位标记点的三维模型;s53:设定步骤s52获得的所述单个的定位标记点的三维模型中心点的空间位置坐标等于所述定位标记信息中心点的空间位置坐标;并将所述单个的定位标记点的三维模型移动到其空间位置坐标的位置;s54:将所述患者病灶局部区域的三维模型移动到其空间位置坐标的位置;s55:重复步骤s51、步骤s52、步骤s53,步骤s54,直至患者病灶局部区域的三维模型全部移动完毕为止;步骤s55执行完毕后,所述包含患者病灶区域的三维模型的空间位置坐标即可确定,并与患者实际病灶区域的空间位置坐标重合。6.根据权利要求4所述的基于不共面特征点匹配的手术导航定位方法,其特征在于,所述独立的患者病灶局部区域的三维模型至少包含独立的第一局部区域,独立的第二局部区域,独立的第三局部区域,独立的第四局部区域;所述独立的第一局部区域包含第二局部区域、第三局部区域、第四局部区域;所述独立的第二局部区域包含第三局部区域、第四局部区域;所述独立的第三局部区域包含第四局部区域;所述独立的第四局部区域为第四局部区域。7.根据权利要求3所述的基于不共面特征点匹配的手术导航定位方法,其特征在于,所述定位标记信息的内容由至少带三个角点,与背景对比具有突出颜色特征的图案组成。8.根据权利要求7所述的基于不共面特征点匹配的手术导航定位方法,其特征在于,每个定位标记信息的图案与其他定位标记信息的图案相比,至少存在三个空间位置坐标不同的角点。9.根据权利要求8所述的基于不共面特征点匹配的术导航定位方法,其特征在于,所述角点包括线与线相交的交点或线的端点。10.根据权利要求9所述的基于不共面特征点匹配的手术导航定位方法,其特征在于,所述定位标记信息的图案为不同内容随机生成的二维码图案。
技术总结
本发明涉及虚拟智能医疗领域,具体地说是一种基于不共面特征点匹配的手术导航定位方法,方法包括以下步骤:在患者身体上创建可识别的体状定位标记区;获取包含所述定位标记区和患者病灶区域的CT或MRI序列图像;获取包含定位标记区和患者病灶区域的三维模型;对包含定位标记区和患者病灶区域的三维模型进行分割和标记处理,获得与所述定位标记区有对应的关联标记的包含患者病灶区域的三维模型;识别患者身体上建立的体状定位标记区,获取体状定位标记区的空间位置坐标,将包含患者病灶区域的三维模型的空间位置坐标与体状定位标记区的空间位置坐标重合。本发明定位过程操作简便,不会对患者造成额外的损伤,手术导航定位的精准度的稳定性明显提高。的精准度的稳定性明显提高。的精准度的稳定性明显提高。
技术研发人员:杨云鹏 谢锦华 孙野
受保护的技术使用者:沈阳蓝软智能医疗科技有限公司
技术研发日:2021.05.21
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。