1.本发明涉及轨道交通信息处理技术领域,尤其涉及一种信息孤岛关键监控信息提取方法及装置。
背景技术:
2.中国的铁路网分布广泛,铁路机车经过的偏远地区经常需要布置信息孤岛,用于采集监测附近的环境信息,这些信息需要通过低成本的有效手段传输到数据中心进行分析处理。
3.信息孤岛中设置有各种类型的传感器,用于采集图像、视频、音频、乃至振动信息,这些传感器会产生大量的监控数据,一方面其占据了大量存储空间,另一方面其中有很多为无效数据。无效数据具体为:静止不动的画面,长期无明显变化的振动、音频数据,可识别的在安全范围内的变化(例如视频显示微风导致植物微幅摆动、音频监控显示安全的降雨)等。在进行数据转储时,对无效数据的传输不但会造成时间及成本的浪费,在数据中心对监控数据进行分析时,大量无效数据的存在还会降低对关键数据查找及分析的效率。
4.因此需要在对监控数据进行转储前对信息孤岛采集的监控数据进行筛选,选择关键信息进行传输。但目前偏远地区的信息孤岛的数据采集系统没有较好的信息过滤方法,通常采用所有数据统一上传的方式,不但浪费存储单元,而且影响分析效率。
技术实现要素:
5.针对现有技术中信息孤岛的数据采集系统没有较好的信息过滤方法,通常采用所有数据统一上传的方式,浪费存储单元且影响分析效率的技术问题。本发明提供了一种信息孤岛关键监控信息提取方法及装置,采用一种自适应卡尔曼滤波算法将关键监控数据提取出来,可以有效地降低最终上传数据量,从而节省转储成本,提升转储效率,最终提升数据分析效率。
6.一方面,本发明提供了一种信息孤岛关键监控信息提取方法,包括如下步骤:
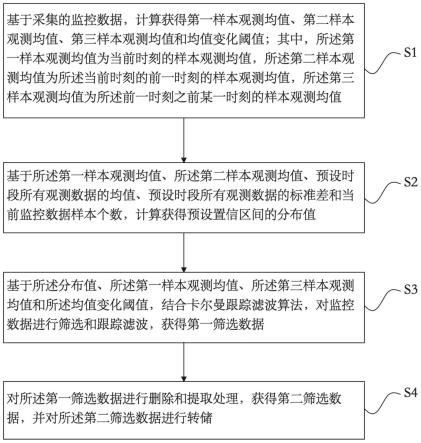
7.s1、基于采集的监控数据计算获得第一样本观测均值、第二样本观测均值、第三样本观测均值和均值变化阈值;其中,所述第一样本观测均值为当前时刻的样本观测均值,所述第二样本观测均值为所述当前时刻的前一时刻的样本观测均值,所述第三样本观测均值为所述前一时刻之前某一时刻的样本观测均值;
8.s2、基于所述第一样本观测均值、所述第二样本观测均值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得预设置信区间的分布值;
9.s3、基于所述分布值、所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行筛选和跟踪滤波,获得第一筛选数据;
10.s4、对所述第一筛选数据进行删除和提取处理,获得第二筛选数据,并对所述第二
筛选数据进行转储。
11.可选的,所述步骤s2包括以下步骤:
12.s21、对所述第一样本观测均值和所述第二样本观测均值进行求差值计算,获得第一均值差值;
13.s22、基于所述第一均值差值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得所述第一均值差值在预设置信区间的分布值。
14.可选的,设定所述第一样本观测均值为所述第二样本观测均值为所述第一均值差值为:
15.所述第一均值差值在预设置信区间的分布值为:
[0016][0017]
其中,μ为所设定较长时段中所有观测数据的均值,s为所设定较长时段中所有观测数据的标准差,n为当前监控数据样本个数,t取值范围为90%~99%。
[0018]
可选的,所述步骤s3包括以下步骤:
[0019]
s31、判断所述分布值的绝对值是否大于第一预设值,获得第一判断结果;
[0020]
s32、当第一判断结果为是时,对监控数据进行第一标注处理,获得第一标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;
[0021]
s33、当第一判断结果为否时,基于所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声或第二观测噪声;
[0022]
s34、基于所述第一观测噪声和所述第二观测噪声进行卡尔曼跟踪滤波算法计算,对所述第一标注数据和所述第二标注数据的监控数据进行跟踪滤波,获得第一筛选数据。
[0023]
可选的,所述步骤s33包括以下步骤:
[0024]
s331、当第一判断结果为否时,对所述第一样本观测均值和所述第三样本观测均值进行求差值计算,获得第二均值差值;
[0025]
s332、判断所述第二均值差值与所述第一样本观测均值的比值的绝对值是否大于所述均值变化阈值,获得第二判断结果;
[0026]
s333、当所述第二判断结果为是时,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;
[0027]
s334、当所述第二判断结果为否时,自适应调整卡尔曼滤波算法中的观测噪声为第二观测噪声。
[0028]
可选的,设定所述第一样本观测均值为所述第三样本观测均值为所述第二均值差值为:所述均值变化阈值为:
[0029]
[0030]
其中,d取0.01~0.1,l根据无突变数据时长确定。
[0031]
可选的,所述步骤s4具体为:对所述第一筛选数据进行初步识别,根据存储区中已记录的各传感器在安全范围内变化的监控数据特征或安全监控数据阈值,删除已标注的符合安全特征或处于安全阈值内变化的待转储监控数据,并对剩余超出安全变化范围的监控数据进行提取和转储处理。
[0032]
另一方面,本发明还提供了一种信息孤岛关键监控信息提取装置,包括:
[0033]
第一计算单元,用于基于采集的监控数据计算获得第一样本观测均值、第二样本观测均值、第三样本观测均值和均值变化阈值;其中,所述第一样本观测均值为当前时刻的样本观测均值,所述第二样本观测均值为所述当前时刻的前一时刻的样本观测均值,所述第三样本观测均值为所述前一时刻之前某一时刻的样本观测均值;
[0034]
第二计算单元,用于基于所述第一样本观测均值、所述第二样本观测均值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得预设置信区间的分布值;
[0035]
跟踪滤波单元,用于基于所述分布值、所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行筛选和跟踪滤波,获得第一筛选数据;
[0036]
转储单元,用于对所述第一筛选数据进行删除和提取处理,获得第二筛选数据,并对所述第二筛选数据进行转储。
[0037]
可选的,所述第二计算单元,包括:
[0038]
第一均值差值计算模块,用于对所述第一样本观测均值和所述第二样本观测均值进行求差值计算,获得第一均值差值;
[0039]
预设置信区间分布值计算模块,用于基于所述第一均值差值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得所述第一均值差值在预设置信区间的分布值。
[0040]
可选的,设定所述第一样本观测均值为所述第二样本观测均值为所述第一均值差值为:
[0041]
所述第一均值差值在预设置信区间的分布值为:
[0042][0043]
其中,μ为所设定较长时段中所有观测数据的均值,s为所设定较长时段中所有观测数据的标准差,n为当前监控数据样本个数,t取值范围为90%~99%。
[0044]
可选的,所述跟踪滤波单元,包括:
[0045]
第一判断模块,用于判断所述分布值的绝对值是否大于第一预设值,获得第一判断结果;
[0046]
第一标注处理模块,用于当第一判断结果为是时,对监控数据进行第一标注处理,获得第一标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;
[0047]
第二标注处理模块,用于当第一判断结果为否时,基于所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行第
二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声或第二观测噪声;
[0048]
跟踪滤波模块,用于基于所述第一观测噪声和所述第二观测噪声进行卡尔曼跟踪滤波算法计算,对所述第一标注数据和所述第二标注数据的监控数据进行跟踪滤波,获得第一筛选数据。
[0049]
可选的,所述第二标注处理模块,包括:
[0050]
第二均值差值计算子模块,用于当第一判断结果为否时,对所述第一样本观测均值和所述第三样本观测均值进行求差值计算,获得第二均值差值;
[0051]
第二判断子模块,用于判断所述第二均值差值与所述第一样本观测均值的比值的绝对值是否大于所述均值变化阈值,获得第二判断结果;
[0052]
第二标注处理子模块,用于当所述第二判断结果为是时,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;
[0053]
观测噪声调整子模块,用于当所述第二判断结果为否时,自适应调整卡尔曼滤波算法中的观测噪声为第二观测噪声。
[0054]
可选的,设定所述第一样本观测均值为所述第三样本观测均值为所述均值变化阈值为:
[0055][0056]
其中,d取0.01~0.1,l根据无突变数据时长确定。
[0057]
可选的,所述转储单元,具体用于对所述第一筛选数据进行初步识别,根据存储区中已记录的各传感器在安全范围内变化的监控数据特征或安全监控数据阈值,删除已标注的符合安全特征或处于安全阈值内变化的待转储监控数据,并对剩余超出安全变化范围的监控数据进行提取和转储处理。
[0058]
本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:
[0059]
本技术提供的一种信息孤岛关键监控信息提取方案,首先,基于采集的监控数据计算获得第一样本观测均值、第二样本观测均值、第三样本观测均值和均值变化阈值;其中,所述第一样本观测均值为当前时刻的样本观测均值,所述第二样本观测均值为所述当前时刻的前一时刻的样本观测均值,所述第三样本观测均值为所述前一时刻之前某一时刻的样本观测均值;接着,基于所述第一样本观测均值、所述第二样本观测均值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得预设置信区间的分布值;进一步,基于所述分布值、所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行筛选和跟踪滤波,获得第一筛选数据;最后,对所述第一筛选数据进行删除和提取处理,获得第二筛选数据,并对所述第二筛选数据进行转储。也就是说,本方案采用一种自适应卡尔曼滤波算法将关键监控数据提取出来,可以有效地降低最终上传数据量,从而节省转储成本,提升转储效率,最终提升数据分析效率。
附图说明
[0060]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其它的附图。
[0061]
图1为本发明实施例提供的第一种信息孤岛关键监控信息提取方法流程图;
[0062]
图2为本发明实施例提供的第二种信息孤岛关键监控信息提取方法流程图;
[0063]
图3为本发明实施例提供的一种信息孤岛关键监控信息提取方法中结合卡尔曼跟踪滤波算法对监控数据进行第二标注处理的流程图;
[0064]
图4为本发明实施例提供的第一种信息孤岛关键监控信息提取装置结构框图;
[0065]
图5为本发明实施例提供的第二种信息孤岛关键监控信息提取装置结构框图;
[0066]
图6为本发明实施例提供的一种信息孤岛关键监控信息提取装置中第二标注处理模块的结构框图。
具体实施方式
[0067]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,并获得其它的实施方式。
[0068]
为使图面简洁,各图中只示意性地表示出了与本发明相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
[0069]
下面以具体实施例详细介绍本发明的技术方案。
[0070]
实施例一
[0071]
请参考图1,本技术实施例提供了一种信息孤岛关键监控信息提取方法,其中,关键监控信息的主要表现在于,其监控数据在监控期间发生了较为明显的变化,例如视频监控数据中画面发生了明显变化(如一只较大的动物横穿监控区域等),所述方法包括如下步骤:
[0072]
s1、基于采集的监控数据计算获得第一样本观测均值、第二样本观测均值、第三样本观测均值和均值变化阈值;其中,所述第一样本观测均值为当前时刻的样本观测均值,所述第二样本观测均值为所述当前时刻的前一时刻的样本观测均值,所述第三样本观测均值为所述前一时刻之前某一时刻的样本观测均值;
[0073]
s2、基于所述第一样本观测均值、所述第二样本观测均值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得预设置信区间的分布值;
[0074]
s3、基于所述分布值、所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行筛选和跟踪滤波,获得第一筛选数据;
[0075]
s4、对所述第一筛选数据进行删除和提取处理,获得第二筛选数据,并对所述第二筛选数据进行转储。
[0076]
在具体实施过程中,监控数据存储区域分为存储区与转储区,存储区容量可存储传感器采集到的某个时间段(例如48小时)内所有监控数据,超过该时段则擦除旧数据重新存储新数据,由于监控数据大部分为无效数据(无明显变化、静止的监控数据、可识别的在安全范围内的变化数据),需要将其中重要数据(有变化的监控数据)转储到转储区,定时上传到数据中心处理。监控数据有固定的采样周期(优选的,可选择周期为1秒),确定对监控数据进行分析的样本容量(优选的,样本容量选择1~100),确定总体监控数据容量(优选的,选择从当前时刻到之前最近的监控突变发生时刻之间所有监控数据,设置为总体容量)。从中获取上述步骤s1中用于计算用的基础数据。
[0077]
进一步,请参考图2,所述步骤s2具体包括以下步骤:
[0078]
s21、对所述第一样本观测均值和所述第二样本观测均值进行求差值计算,获得第一均值差值;
[0079]
s22、基于所述第一均值差值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得所述第一均值差值在预设置信区间的分布值。
[0080]
在具体实施过程中,仍请参考图2,所述步骤s3包括以下步骤:
[0081]
s31、判断所述分布值的绝对值是否大于第一预设值,获得第一判断结果;
[0082]
s32、当第一判断结果为是时,对监控数据进行第一标注处理,获得第一标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;
[0083]
s33、当第一判断结果为否时,基于所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声或第二观测噪声;
[0084]
s34、基于所述第一观测噪声和所述第二观测噪声进行卡尔曼跟踪滤波算法计算,对所述第一标注数据和所述第二标注数据的监控数据进行跟踪滤波,获得第一筛选数据。
[0085]
进一步,请参考图3,所述步骤s33包括以下步骤:
[0086]
s331、当第一判断结果为否时,对所述第一样本观测均值和所述第三样本观测均值进行求差值计算,获得第二均值差值;
[0087]
s332、判断所述第二均值差值与所述第一样本观测均值的比值的绝对值是否大于所述均值变化阈值,获得第二判断结果;
[0088]
s333、当所述第二判断结果为是时,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;
[0089]
s334、当所述第二判断结果为否时,自适应调整卡尔曼滤波算法中的观测噪声为第二观测噪声。
[0090]
在具体实施过程中,设定所述第一样本观测均值为所述第二样本观测均值为所述第三样本观测均值为所述均值变化阈值为si,所述第一均值差值为:所述第二均值差值为:
[0091]
(1)设z0,z2,
…
,z-1
是所述当前时刻的前一时刻(即上一时刻t
i-1
)获得的监控样本
数据(以上一时刻t
i-1
为截至时间,优选的,n可选择1~100),其均值为
[0092]
(2)当处于当前时刻ti时(优选的,处于上一时刻的一秒之后),去除上一时刻取值中的第一个数据z0,并在最后加入本时刻最新采集到的数据z,得到新的n个采样数据z1,z3,
…
,z,其均值为
[0093]
(3)当某段时间内观测数据中无突变,在这些无突变数据的观测数据中,设较前某一时刻样本观测均值为(优选的,m可选择1~100);
[0094]
(4)设置样本观测均值阈值,可设置为固定值(优选的,可选0.01~0.1),也可根据近期的取值动态调整(优选的,d取0.01~0.1,l根据无突变数据时长选取),该阈值设置的原因是为了判断当前时刻的观测数据与较前某一时刻(超出样本空间之外的,例如3分钟前)观测数据是否发生渐变导致存在较大差别(仅靠卡尔曼跟踪滤波不能识别出该种差别)。
[0095]
在步骤s21中计算当前时刻ti与前一时刻t
i-1
各自样本观测平均数据的差值:接着在步骤s22中计算在某个置信区间的t分布的值:其中,μ为所设定较长时段中所有观测数据的均值,s为所设定较长时段中所有观测数据的标准差,n为当前监控数据样本个数,t取值范围为90%~99%。
[0096]
在具体实施过程中,在执行步骤s3时采用卡尔曼滤波状态转移方程和观测方程,具体的,在执行步骤s31时,判断|t|》t
/2
|是否成立,当|t|》t
/2
|时(对应步骤s32),表明在该置信区间下,观测数据发生了突变,例如路边落石导致加速度计测得的数据发生了突变,或者某个动物突然横穿铁路路面,导致摄像头录制的画面发生突变等。将该段观测数据进行标注。此时因为长期无突变数据,卡尔曼滤波算法中的观测噪声qi取值较小,无法用于跟踪突变数据。需将qi重置,以便使其能够适应对突变后监控数据的跟踪滤波;优选的,设置当|t|≤|t
/2
|(对应步骤s33),表明在该置信区间下,观测数据未发生突变,则计算当前时刻ti与更前某时刻t
i-m
各自样本观测平均数据的差值(对应步骤s331)。进一步,执行步骤s332、步骤s333和步骤s334,当时,表明在当前时刻与更前某时刻之间监控数据发生较大渐变,将该段观测数据进行标注,同时将qi重置,以便使其能够适应对突变后监控数据的跟踪滤波;优选的,设置当时,表明当前时刻与更前某时刻之间监控数据未发生较大渐变,由于该段时间内也未发生监控数据突变,则表明无需对该段数据进行转储。将卡尔曼滤波算法中的观测噪声qi置零:qi=0。
[0097]
接着执行步骤s34和步骤s4,进行卡尔曼跟踪滤波算法计算,对经过筛选的监控数据进行跟踪滤波。对上述经过滤波的监控数据进行初步识别,根据存储区中已记录的各传感器在安全范围内变化的监控数据特征或安全监控数据阈值,删除已标注的符合安全特征或处于安全阈值内变化的待转储监控数据,并将剩余超出安全变化范围内的发生突变的监控数据和发生较大渐变的监控数据进行提取并转储,注意标注时间等相关参数。(优选的,可删除监控视频数据中微风导致植物微幅摆动、或安全雨量时的音频监控数据),并继续处
理最新时刻监控数据。
[0098]
在本方法中的卡尔曼滤波算法相关公式及参数说明如下:
[0099]
xi=a
i|i-1
x
i-1
w
i-1
[0100]
zi=hxi vi[0101]
其中:
[0102]
xi与x
i-1
为t及t-1时刻系统状态;
[0103]
zi表示t时刻的观测数据;
[0104]ai|i-1
是状态转移矩阵;
[0105]
h是观测矩阵;
[0106]
vi是测量噪声,其协方差为r;
[0107]
wi是系统噪声,协方差为q。
[0108]
预测和更新方程如下所示:
[0109][0110][0111][0112][0113][0114]
其中:
[0115]
是i-1时刻的最优估计数据;
[0116]
是在最优估计基础上的预测数据;
[0117]
p
i-1
是i-1时刻更新后的误差协方差矩阵;
[0118]
是误差协方差的预测值;
[0119]ki
是i时刻的卡尔曼增益;
[0120]
是i时刻最优预测值;
[0121]
pi是i时刻最优估计值。
[0122]
总而言之,本技术方案利用当前时刻、前一时刻、更前某一时刻样本观测均值、均值变化阈值,计算某置信区间t分布值,以|t|》t
/2
|是否成立作为判断条件,采用卡尔曼滤波状态转移方程和观测方程进行数据标注,获得不同判断结果下的观测噪声qi,再进一步,基于不同的观测噪声qi,进行卡尔曼跟踪滤波算法,对经过筛选的监控数据进行跟踪滤波。接着进行数据的删除和转储。可以有效地降低最终上传数据量,从而节省转储成本,提升转储效率,最终提升数据分析效率。
[0123]
实施例二
[0124]
基于同一发明构思,请参考图4,本发明实施例还提供了一种信息孤岛关键监控信息提取装置,包括:
[0125]
第一计算单元10,用于基于采集的监控数据计算获得第一样本观测均值、第二样本观测均值、第三样本观测均值和均值变化阈值;其中,所述第一样本观测均值为当前时刻的样本观测均值,所述第二样本观测均值为所述当前时刻的前一时刻的样本观测均值,所
述第三样本观测均值为所述前一时刻之前某一时刻的样本观测均值;
[0126]
第二计算单元20,用于基于所述第一样本观测均值、所述第二样本观测均值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得预设置信区间的分布值;
[0127]
跟踪滤波单元30,用于基于所述分布值、所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行筛选和跟踪滤波,获得第一筛选数据;
[0128]
转储单元40,用于对所述第一筛选数据进行删除和提取处理,获得第二筛选数据,并对所述第二筛选数据进行转储。
[0129]
在具体实施过程中,监控数据存储区域分为存储区与转储区,存储区容量可存储传感器采集到的某个时间段(例如48小时)内所有监控数据,超过该时段则擦除旧数据重新存储新数据,由于监控数据大部分为无效数据(无明显变化、静止的监控数据、可识别的在安全范围内的变化数据),需要将其中重要数据(有变化的监控数据)转储到转储区,定时上传到数据中心处理。监控数据有固定的采样周期(优选的,可选择周期为1秒),确定对监控数据进行分析的样本容量(优选的,样本容量选择1~100),确定总体监控数据容量(优选的,选择从当前时刻到之前最近的监控突变发生时刻之间所有监控数据,设置为总体容量)。第一计算单元10从中获取用于计算用的基础数据。
[0130]
进一步,请参考图5,第二计算单元20,包括:
[0131]
第一均值差值计算模块201,用于对所述第一样本观测均值和所述第二样本观测均值进行求差值计算,获得第一均值差值;
[0132]
预设置信区间分布值计算模块202,用于基于所述第一均值差值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得所述第一均值差值在预设置信区间的分布值。
[0133]
在具体实施过程中,仍请参考图5,跟踪滤波单元30,包括:
[0134]
第一判断模块301,用于判断所述分布值的绝对值是否大于第一预设值,获得第一判断结果;
[0135]
第一标注处理模块302,用于当第一判断结果为是时,对监控数据进行第一标注处理,获得第一标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;
[0136]
第二标注处理模块303,用于当第一判断结果为否时,基于所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声或第二观测噪声;
[0137]
跟踪滤波模块304,用于基于所述第一观测噪声和所述第二观测噪声进行卡尔曼跟踪滤波算法计算,对所述第一标注数据和所述第二标注数据的监控数据进行跟踪滤波,获得第一筛选数据。
[0138]
进一步,请参考图6,第二标注处理模块303,包括:
[0139]
第二均值差值计算子模块3031,用于当第一判断结果为否时,对所述第一样本观测均值和所述第三样本观测均值进行求差值计算,获得第二均值差值;
[0140]
第二判断子模块3032,用于判断所述第二均值差值与所述第一样本观测均值的比
值的绝对值是否大于所述均值变化阈值,获得第二判断结果;
[0141]
第二标注处理子模块3033,用于当所述第二判断结果为是时,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;
[0142]
观测噪声调整子模块3034,用于当所述第二判断结果为否时,自适应调整卡尔曼滤波算法中的观测噪声为第二观测噪声。
[0143]
在具体实施过程中,设定所述第一样本观测均值为所述第二样本观测均值为所述第三样本观测均值为所述均值变化阈值为si,所述第一均值差值为:所述第二均值差值为:
[0144]
(1)设z0,z2,
…
,z-1
是所述当前时刻的前一时刻(即上一时刻t
i-1
)获得的监控样本数据(以上一时刻t
i-1
为截至时间,优选的,n可选择1~100),其均值为
[0145]
(2)当处于当前时刻ti时(优选的,处于上一时刻的一秒之后),去除上一时刻取值中的第一个数据z0,并在最后加入本时刻最新采集到的数据z,得到新的n个采样数据z1,z3,
…
,z,其均值为
[0146]
(3)当某段时间内观测数据中无突变,在这些无突变数据的观测数据中,设较前某一时刻样本观测均值为(优选的,m可选择1~100);
[0147]
(4)设置样本观测均值阈值,可设置为固定值(优选的,可选0.01~0.1),也可根据近期的取值动态调整(优选的,d取0.01~0.1,l根据无突变数据时长选取),该阈值设置的原因是为了判断当前时刻的观测数据与较前某一时刻(超出样本空间之外的,例如3分钟前)观测数据是否发生渐变导致存在较大差别(仅靠卡尔曼跟踪滤波不能识别出该种差别)。
[0148]
第一均值差值计算模块201计算当前时刻ti与前一时刻t
i-1
各自样本观测平均数据的差值:接着,预设置信区间分布值计算模块202计算在某个置信区间的t分布的值:其中,μ为所设定较长时段中所有观测数据的均值,s为所设定较长时段中所有观测数据的标准差,n为当前监控数据样本个数,t取值范围为90%~99%。
[0149]
在具体实施过程中,跟踪滤波单元30在执行滤波算法时采用卡尔曼滤波状态转移方程和观测方程,具体的,第一判断模块301判断|t|》t
/2
|是否成立,当|t|》t
/2
|时,表明在该置信区间下,观测数据发生了突变,例如路边落石导致加速度计测得的数据发生了突变,或者某个动物突然横穿铁路路面,导致摄像头录制的画面发生突变等。第一标注处理模块302工作,将该段观测数据进行标注。此时因为长期无突变数据,卡尔曼滤波算法中的观测噪声qi取值较小,无法用于跟踪突变数据。需将qi重置,以便使其能够适应对突变后监控数据的跟踪滤波:优选的,设置当|t|≤|t
/2
|时,表明在该置信区间下,观测数据未发生突变,第二标注处理模块303中的第二均值差值计算子模块3031工作,计算当前时刻ti与更前某时刻t
i-m
各自样本观测平均数据的差值为进一步,第二判断子模块3032、第二标注处理子模块3033和观测噪声调整子模块3034工作,当时,
表明在当前时刻与更前某时刻之间监控数据发生较大渐变,将该段观测数据进行标注,同时将qi重置,以便使其能够适应对突变后监控数据的跟踪滤波;优选的,设置当时,表明当前时刻与更前某时刻之间监控数据未发生较大渐变,由于该段时间内也未发生监控数据突变,则表明无需对该段数据进行转储。将卡尔曼滤波算法中的观测噪声qi置零:qi=0。
[0150]
接着,跟踪滤波模块304和转储单元40工作,进行卡尔曼跟踪滤波算法计算,对经过筛选的监控数据进行跟踪滤波。对上述经过滤波的监控数据进行初步识别,根据存储区中已记录的各传感器在安全范围内变化的监控数据特征或安全监控数据阈值,删除已标注的符合安全特征或处于安全阈值内变化的待转储监控数据,并将剩余超出安全变化范围内的发生突变的监控数据和发生较大渐变的监控数据进行提取并转储,注意标注时间等相关参数。(优选的,可删除监控视频数据中微风导致植物微幅摆动、或安全雨量时的音频监控数据),并继续处理最新时刻监控数据。
[0151]
本实施例中卡尔曼滤波算法相关公式及参数说明同实施例一中所述,这里不再一一赘述。
[0152]
根据上面的描述,上述信息孤岛关键监控信息提取装置用于实现上述信息孤岛关键监控信息提取方法,所以,该装置与上述方法的一个或多个实施例一致,在此就不再一一赘述了。
[0153]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0154]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。