技术特征:
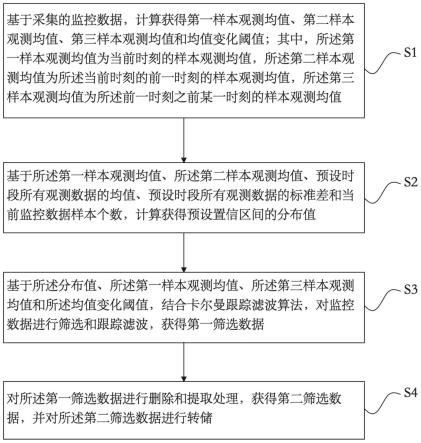
1.一种信息孤岛关键监控信息提取方法,其特征在于,包括如下步骤:s1、基于采集的监控数据计算获得第一样本观测均值、第二样本观测均值、第三样本观测均值和均值变化阈值;其中,所述第一样本观测均值为当前时刻的样本观测均值,所述第二样本观测均值为所述当前时刻的前一时刻的样本观测均值,所述第三样本观测均值为所述前一时刻之前某一时刻的样本观测均值;s2、基于所述第一样本观测均值、所述第二样本观测均值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得预设置信区间的分布值;s3、基于所述分布值、所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行筛选和跟踪滤波,获得第一筛选数据;s4、对所述第一筛选数据进行删除和提取处理,获得第二筛选数据,并对所述第二筛选数据进行转储。2.如权利要求1所述的一种信息孤岛关键监控信息提取方法,其特征在于,所述步骤s2包括以下步骤:s21、对所述第一样本观测均值和所述第二样本观测均值进行求差值计算,获得第一均值差值;s22、基于所述第一均值差值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得所述第一均值差值在预设置信区间的分布值。3.如权利要求1所述的一种信息孤岛关键监控信息提取方法,其特征在于,所述步骤s3包括以下步骤:s31、判断所述分布值的绝对值是否大于第一预设值,获得第一判断结果;s32、当第一判断结果为是时,对监控数据进行第一标注处理,获得第一标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;s33、当第一判断结果为否时,基于所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声或第二观测噪声;s34、基于所述第一观测噪声和所述第二观测噪声进行卡尔曼跟踪滤波算法计算,对所述第一标注数据和所述第二标注数据的监控数据进行跟踪滤波,获得第一筛选数据。4.如权利要求3所述的一种信息孤岛关键监控信息提取方法,其特征在于,所述步骤s33包括以下步骤:s331、当第一判断结果为否时,对所述第一样本观测均值和所述第三样本观测均值进行求差值计算,获得第二均值差值;s332、判断所述第二均值差值与所述第一样本观测均值的比值的绝对值是否大于所述均值变化阈值,获得第二判断结果;s333、当所述第二判断结果为是时,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;s334、当所述第二判断结果为否时,自适应调整卡尔曼滤波算法中的观测噪声为第二观测噪声。
5.如权利要求1~4任一权项所述的一种信息孤岛关键监控信息提取方法,其特征在于,所述步骤s4具体为:对所述第一筛选数据进行初步识别,根据存储区中已记录的各传感器在安全范围内变化的监控数据特征或安全监控数据阈值,删除已标注的符合安全特征或处于安全阈值内变化的待转储监控数据,并对剩余超出安全变化范围的监控数据进行提取和转储处理。6.一种信息孤岛关键监控信息提取装置,其特征在于,包括:第一计算单元,用于基于采集的监控数据计算获得第一样本观测均值、第二样本观测均值、第三样本观测均值和均值变化阈值;其中,所述第一样本观测均值为当前时刻的样本观测均值,所述第二样本观测均值为所述当前时刻的前一时刻的样本观测均值,所述第三样本观测均值为所述前一时刻之前某一时刻的样本观测均值;第二计算单元,用于基于所述第一样本观测均值、所述第二样本观测均值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得预设置信区间的分布值;跟踪滤波单元,用于基于所述分布值、所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行筛选和跟踪滤波,获得第一筛选数据;转储单元,用于对所述第一筛选数据进行删除和提取处理,获得第二筛选数据,并对所述第二筛选数据进行转储。7.如权利要求6所述的一种信息孤岛关键监控信息提取装置,其特征在于,所述第二计算单元,包括:第一均值差值计算模块,用于对所述第一样本观测均值和所述第二样本观测均值进行求差值计算,获得第一均值差值;预设置信区间分布值计算模块,用于基于所述第一均值差值、预设时段所有观测数据的均值、预设时段所有观测数据的标准差和当前监控数据样本个数,计算获得所述第一均值差值在预设置信区间的分布值。8.如权利要求6所述的一种信息孤岛关键监控信息提取装置,其特征在于,所述跟踪滤波单元,包括:第一判断模块,用于判断所述分布值的绝对值是否大于第一预设值,获得第一判断结果;第一标注处理模块,用于当第一判断结果为是时,对监控数据进行第一标注处理,获得第一标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;第二标注处理模块,用于当第一判断结果为否时,基于所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声或第二观测噪声;跟踪滤波模块,用于基于所述第一观测噪声和所述第二观测噪声进行卡尔曼跟踪滤波算法计算,对所述第一标注数据和所述第二标注数据的监控数据进行跟踪滤波,获得第一筛选数据。9.如权利要求8所述的一种信息孤岛关键监控信息提取装置,其特征在于,所述第二标
注处理模块,包括:第二均值差值计算子模块,用于当第一判断结果为否时,对所述第一样本观测均值和所述第三样本观测均值进行求差值计算,获得第二均值差值;第二判断子模块,用于判断所述第二均值差值与所述第一样本观测均值的比值的绝对值是否大于所述均值变化阈值,获得第二判断结果;第二标注处理子模块,用于当所述第二判断结果为是时,对监控数据进行第二标注处理,获得第二标注数据,以及自适应调整卡尔曼滤波算法中的观测噪声为第一观测噪声;观测噪声调整子模块,用于当所述第二判断结果为否时,自适应调整卡尔曼滤波算法中的观测噪声为第二观测噪声。10.如权利要求6~9任一权项所述的一种信息孤岛关键监控信息提取装置,其特征在于,所述转储单元,具体用于对所述第一筛选数据进行初步识别,根据存储区中已记录的各传感器在安全范围内变化的监控数据特征或安全监控数据阈值,删除已标注的符合安全特征或处于安全阈值内变化的待转储监控数据,并对剩余超出安全变化范围的监控数据进行提取和转储处理。
技术总结
本发明公开了一种信息孤岛关键监控信息提取方法及装置,用于解决现有技术中信息孤岛数据采集系统没有较好的信息过滤方法,浪费存储单元且影响分析效率的技术问题。该方法包括:计算获得第一样本观测均值、第二样本观测均值、第三样本观测均值和均值变化阈值;进一步,计算获得预设置信区间的分布值;接着,基于所述分布值、所述第一样本观测均值、所述第三样本观测均值和所述均值变化阈值,结合卡尔曼跟踪滤波算法,对监控数据进行筛选和跟踪滤波;再对筛选数据进行删除和提取处理后转储。本方案采用一种自适应卡尔曼滤波算法将关键监控数据提取出来,可以有效地降低最终上传数据量,从而节省转储成本,提升转储效率,最终提升数据分析效率。升数据分析效率。升数据分析效率。
技术研发人员:戚建淮 刘航 崔宸 解亚飞 唐娟
受保护的技术使用者:深圳市永达电子信息股份有限公司
技术研发日:2022.05.07
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。