1.本公开涉及用于找到用于车辆的未占用的停车位的系统和方法。
背景技术:
2.在许多地方,诸如主要城市,可能难以找到公共街道停车位。驾驶员可能必须在某个位置绕圈很长一段时间,直到有停车位空出为止。停车位不足可能导致双排停车、非法停车以及通过不断的绕圈而阻碍交通。关于这些和其他考虑因素,提出了本文的公开内容。
技术实现要素:
3.本文公开的系统和方法被配置为测量和生成包括停车位的位置及其占用状态的停车环境数据,并且使用停车环境数据来找到用于车辆的未占用的停车位。具体地,一种系统被配置为基于从车辆接收的停车环境数据来确定停车位的位置和占用状态,并且基于停车环境数据的数据库来确定未占用的停车位的位置。
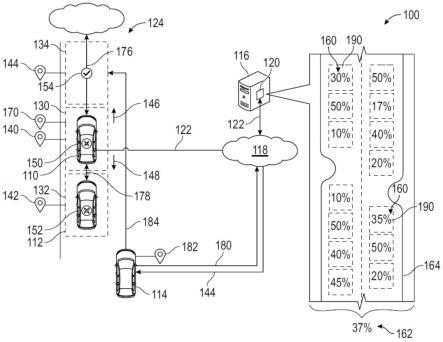
4.参考图1,系统100包括通过网络118连接的多个车辆110、112、114和服务器116。服务器116包括停车环境数据122的数据库120。
5.在图1中,停车环境124或区域包括多个停车位130、132、134。每个停车位130、132、134具有相应的位置140、142、144。在该示例中,停车位134的位置144在正向方向146上与停车位130的位置140相距一定距离(例如,停车位的长度)处;以及停车位132的位置142在反向方向148上与停车位130的位置140相距一定距离处(例如,在停车位的长度处)。
6.停车环境数据122表示停车环境124(例如,表示为数字地图的区域164),其包括停车位130、132、134的位置140、142、144,停车位130、132、134的占用状态150、152、154(例如,“x”符号150、152表示占用状态,并且“对号”符号154表示未占用状态),与占用状态150、152、154相关联的时间,停车位190的预测可用性160(例如,基于停车位的历史占用状态,停车位在一天中的一部分期间未被占用的时间百分比),区域164的预测可用性162等。
7.数据库120可以将停车位识别为残疾人、充电点、经济型车辆、大型车辆等。数据库120还可以包括永久的或不被预测为移动的对象(例如,挂车、发电机、存储容器等)以及此类对象的位置。
8.服务器116被配置为从一个或多个车辆(例如,如图1所示的车辆110)接收停车环境数据122,以生成附加的停车环境数据122,并且基于停车环境数据122来更新数据库120。
9.例如,在图1,车辆110停放在停车位130中。在其他情况下,车辆110可能沿街道行驶。车辆110可以确定其位置170并且经由网络118将位置170发送到服务器116。
10.服务器116可以基于位置170确定车辆110正占用停车位130,并且更新停车位130的数据库120(例如,将占用状态150改变为“已占用”),其包括更新的时间。例如,将位置170与位置140、142、144进行比较,并且停车位130被识别为在位置170与位置140之间找到最小差异处。
11.车辆110可以确定在正向方向146和反向方向148中的每一者上到对象或障碍物的
距离176、178。在图1中,到对象的距离176延伸超过停车位134,并且距离178是到停车位132中的车辆112。
12.车辆110还可以测量相邻停车位中的车辆112的运动,并且通知服务器116车辆112即将离开。
13.车辆110可以将相对于其位置170的距离176、178和方向146、148发送到服务器116。服务器116可以基于相对于位置170的距离176、178和方向146、148来确定停车位132、134的占用状态152、154。
14.服务器116可以基于停车位132、134的位置142、144和位置170来确定与位置170相邻的停车位132、134。例如,位置144在正向方向146上最靠近位置170,并且位置142在反向方向148上最靠近位置170。
15.对于每个方向146、148,相关联的距离176、178指示在该方向上是否有以及有多少空间未被占用。例如,服务器116确定停车位134未被占用,因为在正向方向146上的正向距离176大于停车位134的长度;并且服务器116更新占用状态154以反映停车位134未被占用。服务器116确定停车位132被占用,因为在反向方向148上的反向距离178小于停车位132的长度;并且服务器116更新占用状态152以反映停车位132被占用。
16.因此,服务器116包括停车环境数据122的数据库120,所述停车环境数据可以用于促进定位未占用的停车位或具有较高未被占用的概率的停车位所在的停车位或区域164。
17.在图1中,车辆114向服务器116发送请求180以找到未占用的停车位。请求180可以包括车辆114的目的地位置或位置182,其中的每一者可以表示车辆114想要停放的位置或区域。出于教导的目的,车辆位置182将用于进一步描述示例性方法。
18.基于请求180,服务器116可以确定包括车辆位置182的停车环境124(例如,指定区域164)中的未占用停车位。停车环境124或区域164可以是预定义区域,或者可以根据距车辆位置182的阈值距离来确定。
19.停车环境124中的停车位提供一组初始停车位130、132、134。在距车辆位置182阈值距离的情况下,服务器116可以将车辆位置182与停车位130、132、134的位置140、142、144进行比较以确定一组初始停车位。
20.然后,服务器116可以确定该组停车位130、132、134中的哪个具有未占用的占用状态150、152、154。在图1中,服务器116可以将停车位134选择为最靠近车辆位置182并且具有未占用的占用状态154的停车位。服务器116可以向车辆114提供停车位134的位置144,所述车辆然后可以生成向停车位134的位置144的方向184。
21.更一般地,服务器116可以生成区域中的未占用的停车位的集合或清单或根据到车辆位置182的最短距离来排列,并且提供最近的未占用的停车位的位置。随着停车位的状态随时间变化(例如,在车辆114到达停车位134之前),服务器116可以更新未占用的停车位的清单(例如,添加或移除停车位)。服务器116可以提供下一个最佳停车位,直到车辆停放在未占用的空间中。
22.替代地,车辆114可以在车辆114的显示器上提供的数字地图(例如,如由区域164表示)上显示未占用的停车位的位置。例如,服务器116可以提供包括高密度未占用停车位的区域。当停车位的状态随时间变化时,服务器116可以更新地图(例如,从区域或单独的停车位添加或移除突出显示)。
23.对于每个停车位,随时间跟踪占用状态150、152、154,并且服务器116计算每个停车位的预测可用性160。可以针对一周中的每一天和每天期间的时间增量来计算预测可用性160。例如,停车位130在星期三从下午1点到1:30的预测可用性160可以使用在星期三下午1点到1:30的时间段中的时刻测量的历史占用状态150。如针对区域164中的空间所示,预测可用性160可以被呈现为停车位未被占用的时间百分比。
24.预测可用性160还可以基于占用状态150、152、154的变化频率。
25.如果停车位的占用状态150、152、154是未知的,则服务器116可以使用预测可用性160来促进找到未占用的停车位。例如,如果最新的测量结果不可用,则停车位的占用状态可能是未知的。
26.车辆114可以在车辆114的显示器上提供的数字地图(例如,如由区域164表示)上显示停车位190的位置和其预测可用性160。图1将数据库120示意性地示出为包括区域164(例如,街道)中的停车位190的预测可用性160。可以突出显示预测可用性160高于特定阈值(例如,50%)的停车位190。
27.服务器116还可以使用停车位190的预测可用性160来确定区域164的预测可用性162。例如,区域164的预测可用性162可以是区域164中的停车位190的预测可用性160的平均值。另外或替代地,如果特定数量的空间具有高于特定阈值的预测可用性160,则区域中的预测可用性162可以由该区域的此类空间的密度表示。
28.如果预测可用性162高于特定阈值,则可以在地图上突出显示或由数值表示区域164。该特征有助于比较区域并发现可停车的区域。
29.在本文中更详细地提供了本公开的这些和其他优点。
附图说明
30.参考附图阐述具体实施方式。使用相同的附图标记可以指示类似或相同的项。各种实施例可以利用除了附图中示出的那些之外的元件和/或部件,并且一些元件和/或部件可能不存在于各种实施例中。附图中的元件和/或部件不一定按比例绘制。在整个本公开中,根据上下文,单数和复数术语可以可互换地使用。
31.图1描绘了根据本公开的包括停车环境中的车辆的系统。
32.图2描绘了根据本公开的图1的包括车辆系统的系统。
33.图3描绘了根据本公开的定位停车位的方法。
具体实施方式
34.下文将参考附图更全面地描述本公开,附图中示出了本公开的示例性实施例,并且所述实施例不意图为限制性的。
35.参考图1和图2,更详细地描述了系统100。系统100包括多个车辆110、112、114和服务器116。
36.出于教导的目的,进一步详细描述车辆110。然而,车辆110的描述适用于多个车辆中的另一个。
37.车辆110可以采取乘用或商用汽车的形式,诸如例如小汽车、卡车、运动型多用途车、跨界车辆、厢式货车、小型货车、出租车、公交车等,并且可被配置为包括各种类型的汽
车驱动系统。示例驱动系统可以包括各种类型的内燃发动机(ice)动力传动系统,所述各种类型的内燃发动机动力传动系统具有汽油、柴油或天然气动力的燃烧发动机与常规的驱动部件,诸如变速器、驱动轴、差速器等。
38.在另一种配置中,车辆110可以被配置为电动车辆(ev)。更具体地,车辆110可以包括电池ev(bev)驱动系统。车辆110可以被配置为具有独立车载动力装置的混合动力ev(hev)或包括hev动力传动系统的插电式hev(phev),所述hev动力传动系统可连接到外部动力源(包括具有燃烧发动机动力装置和一个或多个ev驱动系统的并联或串联混合动力传动系统)。hev可以包括用于蓄电的电池和/或超级电容器组、飞轮蓄电系统或者其他发电和蓄电基础设施。
39.车辆110还可以被配置为使用燃料电池(例如,氢燃料电池车辆(hfcv)动力传动系统等)和/或这些驱动系统和部件的任何组合将液体或固体燃料转换为可用动力的燃料电池车辆(fcv)。
40.参考图2,车辆110包括被配置或编程为生成帮助识别到对象的距离或另外识别停车位的占用状态的信号的装置或传感器。
41.装置或传感器可以包括安装到车辆110的图像传感器(例如,相机240、250)以实现视觉感知。每个相机通过产生车辆110周围的环境的至少一部分的图像246、256来生成传感器数据。为了清楚起见,针对每个方向146、148使用单个相机。然而,可以使用相机的组合,并且可以将来自多个相机的传感器数据一起融合到车辆周围的环境的视图中。
42.相机240、250可以被安装成面向车辆110移动的方向(例如,向前或向后)。出于教导的目的,相机240(或一组相机)是前置相机(例如,正向方向146上的视野),并且相机250(或一组相机)是后置相机(例如,反向方向148上的视野)。
43.相机240、250各自包括传感器部件(例如,透镜、光圈、快门、传感器板、ir发射器、ir检测器等)和专用集成电路(asic)。asic可以包括数字信号处理(dsp)功能,以对由传感器部件捕获的图像传感器数据执行各种操作。
44.相机240、250可以是类似类型或甚至相同类型的相机。相机240、250具有可以是类似的并且可能甚至基本上相同的视野。在视野内,相机240、250可以分别感测从车辆出去到某个距离阈值的停车环境124。
45.相机240、250可以是可以生成图像246、256的红-绿-蓝/红外(rgb/ir)相机,其中每个图像部分包括红色像素、绿色像素、蓝色像素和ir像素。当有足够的光时(例如,在白天期间),使用rgb像素强度。来自ir像素的强度信息可以在夜间以及其他弱光(或无光)环境中使用来感测停车环境124。弱光(或无光)环境可以包括自然光被阻挡的隧道或其他环境。
46.替代地,相机240、250可以包括其他传感器部件(例如,透镜、光圈、快门、传感器板、激光器、用于检测激光器反射的传感器等)和专用集成电路(asic)。例如,相机240、250可以包括具有处理芯片的多用途飞行时间(tof)相机,所述处理芯片诸如例如红-绿-蓝-红外(rgb-ir)互补金属氧化物半导体(cmos)芯片。类似于激光雷达,激光器发射ir波长的脉冲。处理芯片(例如,在asic内)读取飞行时间信息以处理对象的深度(例如,距离176、178)。处理芯片可以基于对象深度设置适当的ir像素强度信息。激光雷达和ir像素强度可以在夜间以及其他弱光(或无光)环境中或当另外适当时使用,以感测停车环境124。
47.所述装置还可以包括诸如被配置用于使用无线电波检测和定位对象无线电探测
和测距(radar和“雷达”)传感器之类的传感器(例如传感器260)、光探测和测距(lidar或“激光雷达”)传感器、超声传感器、惯性测量单元(imu)、全球定位传感器(gps)和用于轨迹、障碍物检测、对象分类的其他视觉传感器等。使用激光雷达传感器,可以基于三维(3d)点云来跟踪对象。
48.来自每个相机240、250和激光雷达传感器260的数据可以被提供给车辆计算机272的中央传感器感知芯片270。感知芯片270可以是通用或专用处理单元,诸如例如中央处理单元(cpu)、图形处理单元(gpu)等。替代地或另外地,感知芯片可以包括逻辑电路,诸如例如asic或现场可编程门阵列(fpga)。感知算法在感知芯片上运行。
49.中央传感器感知芯片270可以使用传感器融合或感知算法来将数据融合到车辆110周围的停车环境124的视图中,或者以其他方式处理数据以用于理解和导航停车环境124。
50.感知算法可以包括根据多层(或“深度”)模型构建的神经网络。多层神经网络模型可以包括输入层、多个隐藏层以及输出层。多层神经网络模型还可以包括损失层。多个隐藏层可以执行许多非线性变换。
51.对于融合的相机传感器数据(例如图像)的分类,将传感器数据中的值(例如,像素值)分配到输入节点并且然后馈送通过神经网络的多个隐藏层。
52.从停车环境124的角度来看,感知算法可以处理相机或传感器数据以对停车环境124内的感兴趣的对象进行识别和分类。对象分类可以包括:其他车辆、停车位或停车线、标志、障碍物(例如,购物车、行人)等。感知算法还可以确定对象在停车环境124内的位置、到对象的距离(例如,距离176、178)和在对象正移动的情况下对象的路径。
53.车辆计算机272包括计算机部件,所述计算机部件包括存储器(例如,存储器274)和处理器(例如,处理器276和/或感知芯片270)。处理器可以是任何合适的处理装置或处理装置集,诸如但不限于:微处理器、基于微控制器的平台、合适的集成电路、一个或多个现场可编程门阵列(fpga)和/或一个或多个专用集成电路(asic)。
54.存储器可以是易失性存储器(例如,ram,其可包括非易失性ram、磁性ram、铁电ram和任何其他合适的形式);非易失性存储器(例如,磁盘存储器、快闪存储器、eprom、eeprom、基于忆阻器的非易失性固态存储器等);不可更改的存储器(例如,eprom);只读存储器;和/或高容量存储装置(例如,硬盘驱动器、固态驱动器等)。在一些示例中,存储器包括多种存储器,尤其是易失性存储器和非易失性存储器。
55.存储器是其上可嵌入一个或多个指令集(诸如用于执行本公开的方法的软件)的计算机可读介质。指令可体现如本文所述的方法或逻辑中的一者或多者。指令可在执行指令期间完全地或至少部分地驻留在存储器、计算机可读介质中的任何一者或多者内和/或驻留在处理器内。
56.术语“非暂时性计算机可读介质”和“计算机可读介质”应被理解为包括单个介质或多个介质(诸如,存储一个或多个指令集的集中式数据库或分布式数据库和/或相关联的高速缓存和服务器)。术语“非暂时性计算机可读介质”和“计算机可读介质”还包括能够存储、编码或携载指令集的任何有形介质,所述指令集用于由处理器执行或使系统执行本文所公开的方法或操作中的任一者或多者。如本文所使用的,术语“计算机可读介质”明确地限定为包括任何类型的计算机可读存储装置和/或存储盘,并且不包括传播信号。
334可以被配置和/或编程为从与电信提供商相关联的一个或多个蜂窝塔和/或与车辆110相关联的远程信息处理服务交付网络(sdn)接收消息,并且向其传输消息以用于协调车队。
66.blem 334可以使用和bluetooth通信协议通过广播小广告包和/或收听小广告包的广播并且与根据本文所述的实施例配置的响应装置建立连接来建立无线通信。例如,blem 334可以包括针对响应于或发起通用属性配置文件(gatt)命令和请求的客户端装置的gatt装置连接性。
67.rsu 290和tcu 318可以包括被配置为传输(例如,广播)车辆对外界(v2x)信号和/或接收从另一个无线电广播的车辆对外界(v2x)信号的无线电。专用短程通信(dsrc)是车辆对外界(v2x)或汽车对外界(cv2x)协议的一种实现方式。也可以使用v2x/c2x的任何其他合适的实现方式。有时使用通常与连接的车辆程序等有关的其他名称。
68.rsu 290和tcu 318可以包括被配置为例如使用2.4/5.8ghz频带传输和/或接收信号的射频(rf)硬件。
69.上文所述的通信技术诸如cv2x可以与其他技术(诸如可视光通信(vlc)、蜂窝通信和短程雷达)相结合,以便于传达位置、速度、航向、到其他对象的相对位置,并与其他车辆112、114、移动装置、rsu 290或外部计算机系统116交换信息。
70.外部服务器(例如,服务器116)可以经由一种或多种网络118与车辆110和rsu 290通信地联接,所述一种或多种网络可以经由一个或多个无线信道350进行通信。
71.rsu 290可以使用近场通信(nfc)协议、协议、wi-fi、超宽带(uwb)和其他可能的数据连接以及分享技术经由直接通信(例如,信道354)与车辆110相连接。
72.网络118示出了本公开的各种实施例中讨论的已连接装置可以在其中进行通信的示例性通信基础设施。网络118可以是和/或可包括互联网、专用网络、公共网络或使用任一种或多种已知的通信协议操作的其他配置,所述已知的通信协议是诸如例如传输控制协议/互联网协议(tcp/ip)、基于电气和电子工程师协会(ieee)标准802.11的wi-fi、wimax(ieee 802.16m)、超宽带(uwb)以及蜂窝技术诸如时分多址(tdma)、码分多址(cdma)、高速分组接入(hspda)、长期演进(lte)、全球移动通信系统(gsm)和第五代(5g)、通用移动电信系统(umts)、长期演进(lte)等。
73.nav系统330可以被配置和/或编程为确定车辆位置。nav系统330可以包括全球定位系统(gps)接收器,所述全球定位系统(gps)接收器被配置或编程为对车辆位置相对于与gps 332相关联的卫星或基于地面的发射塔进行三角测量。nav系统330可以确定并共享车辆位置并接收位置,诸如停车环境124中的其他车辆的位置。nav系统330可以在存储器中存储固定位置,诸如停车环境124中的停车位的位置。
74.nav系统330还可以被配置或编程为开发从当前车辆位置到所选择目的地的路线、显示地图并呈现至所选择目的地的方向、并确定行进至所选择位置的估计时间以及预测的到达时间。估计的到达时间可以基于位置、速度和航向或nav系统330确定的其他车辆信息。nav系统330可以与自主驾驶系统一起工作以将车辆110移动到某个位置。
75.bcm 312通常包括传感器、车辆性能指示器以及与车辆系统相关联的可变电抗器的集成,并且可以包括基于处理器的配电电路,所述配电电路可控制与车身(诸如车灯、车窗、安全装置、门锁和访问控制)相关联的功能以及各种舒适性控制。bcm 312还可以作为总
线和网络接口的网关操作,以与远程ecu进行交互。
76.bcm 312可以被配置用于车辆能量管理、外部照明控制、刮水器功能性、电动车窗和车门功能性、暖通空调系统以及驾驶员集成系统。在其他方面,bcm 312可控制辅助设备功能性和/或负责此类功能性的集成。在一个方面,具有车辆控制系统的车辆可至少部分地使用bcm 312来集成所述系统。
77.bcm 312可以协调各种车辆功能中的任一种或多种功能,包括能量管理系统、警报、车辆防盗器、驾驶员和乘车者进入授权系统、电话即钥匙(paak)系统、驾驶员辅助系统、自主车辆(av)控制系统、电动车窗、车门、致动器以及其他功能性。
78.参考图1,服务器116包括停车环境数据122的数据库120,所述停车环境数据可以用于促进定位未占用的停车位或具有较高未被占用的概率的停车位所在的区域164。服务器116接收停车环境数据122,生成停车环境数据122,并基于停车环境数据122更新数据库120。
79.停车环境数据122表示停车环境124(例如,一个或多个区域164),其包括停车位130、132、134的位置140、142、144,停车位130、132、134的占用状态150、152、154(例如,“x”符号150、152表示占用状态,并且“对号”符号154表示未占用状态),与占用状态150、152、154相关联的时间,停车位的预测可用性160(例如,基于停车位的历史占用状态,停车位在一天中的一部分期间未被占用的时间百分比),区域164的预测可用性162等。数据库120还可以包括永久的或不被预测为移动的对象(例如,挂车、发电机、存储容器等)以及此类对象的位置。
80.停车环境数据122还可以包括停车位在至少某些日期和时间受到约束或限制的指定或指示。例如,停车位可以被指定用于残疾人、用于装载/卸载、仅用于许可(例如,当地居民)、作为消防车道、其组合等。停车位的可用性可以限于某些小时,以允许进行街道清洁、街道封闭(例如,用于维修)、在白天或营业时间为企业提供停车位、其组合等。
81.停车环境数据122可以包括从传感器接收的数据、从传感器接收的数据生成的数据以及来自其他系统或源(诸如由市政府设定的停车计时器和停车规定)的数据。
82.对于每个停车位,服务器116随时间跟踪占用状态150、152、154,并且计算每个停车位190的预测可用性160。可以针对一周中的每一天和每天期间的时间增量来计算预测可用性160。例如,停车位130在星期三从下午1点到1:30的预测可用性160可以使用在星期三下午1点到1:30的时间段中的时刻测量的历史占用状态150。如针对区域164中的停车位190所示,预测可用性160可以被呈现为停车位190未被占用的时间百分比。
83.图1将数据库120示意性地示出为包括区域164(例如,街道)中的停车位190的预测可用性160。可以突出显示预测可用性160高于特定阈值(例如,50%)的停车位190。
84.服务器116计算区域164的预测可用性162。例如,预测可用性162可以基于区域164中具有高于特定阈值的预测可用性160的停车位190的数量。区域164可以基于其预测可用性162在地图上突出显示,以便于比较区域并发现可停车的区域。
85.参考图3,根据示例性方法400的第一步骤410,服务器116从车辆110接收包括车辆110的位置170的停车环境数据122。车辆110可以确定其位置170并且经由网络118将位置170发送到服务器116。
86.根据第二步骤420,服务器116可以基于位置170确定车辆110正占用停车位130,并
且更新停车位130的数据库120(例如,将占用状态150改变为已占用),其包括更新的时间。服务器116可以将车辆110的位置170与停车位的位置140、142、144进行比较,并且识别在车辆110的位置170与停车位130的位置140之间找到最小差异所在的停车位130。
87.根据第三步骤430,车辆110可以确定在正向方向146和反向方向148中的每一者上到对象或障碍物的距离176、178。车辆110可以将相对于其位置170的距离176、178和方向146、148发送到服务器116。
88.根据第四步骤440,服务器116可以基于相对于车辆110的位置170的距离176、178和方向146、148来确定停车位132、134的占用状态152、154。服务器116可以基于停车位132、134的位置142、144和位置170以及方向146、148来确定与位置170相邻的停车位132、134。例如,位置144在正向方向146上最靠近位置170,并且位置142在反向方向148上最靠近位置170。
89.服务器可以确定每个方向上的下一个最近的停车位,然后确定每个方向上的下一个最近的停车位,以此类推。
90.对于每个方向146、148,相关联的距离176、178指示在该方向上是否有空间以及空间中有多少未被占用。例如,服务器116确定停车位134未被占用,因为在正向方向146上的正向距离176大于停车位134的长度;并且服务器116更新占用状态154以反映停车位134未被占用。如果在自停车位134的正向方向146上存在附加停车位,则可以将该停车位更新为已占用的占用状态154。
91.服务器116确定停车位132被占用,因为在反向方向148上的反向距离178小于停车位132的长度;并且服务器116更新占用状态152以反映停车位132被占用。
92.通常,可以将距离除以停车位的长度(例如,相邻停车位的位置之间的距离),并且结果的整数是未占用的停车位的数量。类似地,对于两个停车位,可以将距离除以两个停车位之间的距离,并且如果结果的整数为一,则停车位被占用,并且如果结果的整数为零,则停车位未被占用。
93.根据第五步骤450,服务器116从车辆114接收找到未占用的停车位或区域的请求。请求180可以包括车辆114的目的地位置或位置182,其中的每一者可以表示车辆114想要停放的位置或区域。出于教导的目的,车辆位置182将用于进一步描述示例性方法。
94.根据第六步骤460,基于请求180,服务器116可以确定包括车辆位置182的停车环境124(例如,指定区域164)中的一个或多个未占用停车位。停车环境124或区域164可以是预定义区域,或者可以根据距车辆位置182的阈值距离来确定。停车环境124中的停车位提供一组初始停车位130、132、134。在距车辆位置182阈值距离的情况下,服务器116可以将车辆位置182与停车位130、132、134的位置140、142、144进行比较以确定一组初始停车位。
95.然后,服务器116可以确定该组停车位130、132、134中的哪个具有未占用的占用状态150、152、154。在图1中,服务器116可以将停车位134选择为最靠近车辆位置182并且具有未占用的占用状态154的停车位。
96.服务器116可以向车辆114提供停车位134的位置144,所述车辆然后可以生成向停车位134的位置144的方向184。
97.更一般地,服务器116可以生成根据到车辆位置182的最短距离来排列的未占用的停车位的集合或清单,并且提供最近的未占用的停车位的位置。服务器116还可以确定具有
高密度未占用停车位的区域的位置。
98.随着停车位的状态随时间变化(例如,在车辆114到达停车位134之前),服务器116可以更新未占用的停车位的清单(例如,添加或移除停车位)。服务器116可以提供下一个最佳停车位,直到车辆停放在未占用的空间中。
99.车辆114可以在车辆114的显示器上提供的数字地图(例如,如由区域164表示)上显示未占用的停车位的位置。当停车位的状态随时间变化时,服务器116可以更新地图(例如,从停车位添加或移除突出显示)。
100.根据第七步骤470,如果在第五步骤450处停车位的占用状态150、152、154是未知的,则服务器116可以提供停车环境124或区域164中的停车位190的位置和预测可用性160,以便于找到未占用的停车位。例如,如果最新的测量结果不可用,则停车位的占用状态可能是未知的。
101.车辆114可以在车辆114的显示器上提供的数字地图(例如,如由区域164表示)上显示停车位190的位置和其预测可用性160。
102.根据第八步骤480,如果在第五步骤450处停车位的占用状态150、152、154是未知的,则服务器116可以提供区域164的位置和预测可用性162。例如,区域164的预测可用性162可以是区域164中的停车位190的预测可用性160的平均值、区域164中的停车位190的最高预测可用性160或密度(例如,具有高于特定阈值的预测可用性160的停车位190的数量)。
103.在以上公开中,已参考了形成以上公开的一部分的附图,附图示出了其中可实践本公开的具体实施方式。应理解,在不脱离本公开的范围的情况下,可以利用其他实现方式,并且可以进行结构改变。本说明书中对“一个实施例”、“实施例”、“示例性实施例”等的引用指示所描述的实施例可以包括特定特征、结构或特性,但每个实施例可以不一定包括所述特定特征、结构或特性。此外,此类短语不一定是指同一实施例。此外,当结合实施例描述特征、结构或特性时,无论是否明确描述,本领域的技术人员都将认识到结合其他实施例的此类特征、结构或特性。
104.还应当理解,如本文所用的词语“示例”意图在本质上是非排他性的和非限制性的。更具体地,如本文所用的词语“示例性”指示若干示例中的一者,并且应理解,对所描述的特定示例并没有过分的强调或偏好。
105.计算机可读介质(也称为处理器可读介质)包括参与提供可由计算机(例如,由计算机的处理器)读取的数据(例如,指令)的任何非暂时性(例如,有形)介质。此类介质可采取许多形式,包括但不限于非易失性介质和易失性介质。计算装置可包括计算机可执行指令,其中所述指令可由一个或多个计算装置(诸如以上列出的那些)执行并且存储在计算机可读介质上。
106.关于本文所描述的过程、系统、方法、启发法等,应理解,尽管已经将此类过程等的步骤描述为根据某个有序顺序发生,但是此类过程可以以与本文所描述的次序不同的次序执行所描述的步骤来实践。还应理解,可以同时执行某些步骤,可以添加其他步骤,或者可以省略本文描述的某些步骤。换句话说,本文中对过程的描述是出于说明各种实施例的目的而提供的,并且绝不应被解释为限制权利要求。
107.因此,应当理解,以上描述意图是说明性的而非限制性的。在阅读以上描述时,除所提供的示例之外的许多实施例和应用将为明显的。所述范围不应参考以上描述来确定,
而是应参考所附权利要求以及享有此类权利要求的权利的等效物的整个范围来确定。预计并且意图在于本文所讨论的技术未来将有所发展,并且所公开的系统和方法将并入此类未来实施例中。总而言之,应当理解,本技术能够进行修改和改变。
108.除非在本文中做出明确的相反指示,否则权利要求中使用的所有术语意图被赋予其如本文中描述的技术人员所理解的普通含义。特别地,除非权利要求叙述相反的明确限制,否则使用例如“一个”、“该”、“所述”等单数冠词应被解读为叙述所指示的要素中的一者或多者。除非另有特别说明或在使用时在上下文内以其他方式理解,否则诸如尤其是“能够”、“可能”、“可以”或“可”的条件语言通常意图表达某些实施例可包括某些特征、元件和/或步骤,而其他实施例可不包括某些特征、元件和/或步骤。因此,此类条件语言一般并不意图暗示一个或多个实施例无论如何都需要各特征、元件和/或步骤。
109.根据本发明,一种方法包括:从第一车辆接收所述第一车辆的第一位置、第一方向和沿所述第一方向的第一距离,其中所述第一方向是所述第一车辆的正向方向和反向方向中的一者;基于所述第一位置和所述第一方向来确定多个停车位中的第一停车位;以及基于所述第一方向上的所述第一距离来确定所述第一停车位的占用状态。
110.在本发明的一个方面,如果所述第一距离小于停车位的长度,则确定所述第一停车位的所述占用状态为已占用;并且其中如果所述第一距离大于停车位的长度,则确定所述第一停车位的所述占用状态为未占用。
111.在本发明的一个方面,所述方法包括:基于所述第一位置和所述第一方向来确定所述多个停车位中的第二停车位,其中所述第一停车位在所述第二停车位与所述第一位置之间;以及基于所述第一方向上的所述第一距离来确定所述第二停车位的所述占用状态;其中如果所述第一距离大于停车位的长度并且小于停车位的两个长度,则确定所述第二停车位的所述占用状态为已占用;其中如果所述第一距离大于停车位的两个长度,则确定所述第二停车位的所述占用状态为未占用。
112.在本发明的一个方面,所述方法包括:从所述第一车辆接收第二方向和沿所述第二方向的第二距离,其中所述第一方向是所述第一车辆的正向方向和反向方向中的一者,并且所述第二方向是所述正向方向和所述反向方向中的另一者;基于所述第一位置和所述第二方向来确定所述多个停车位中的第二停车位;以及基于沿所述第二方向的所述第二距离来确定所述第二停车位的所述占用状态。
113.在本发明的一个方面,所述方法包括:基于从第二车辆接收的位置来确定具有未占用的所述占用状态的停车位;以及向所述第二车辆传输所述停车位的位置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。