1.本发明属于粗糙表面接触变形研究技术领域,涉及一种考虑弹塑性状态粗糙表面接触刚度的预测方法及系统。
背景技术:
2.零件加工表面并非看似光滑的平面,在微观尺度下是由尺寸不同的大量微凸体组成的粗糙表面,使零件粗糙表面结合面处呈现出复杂的接触特性,是造成粗糙表面结合面上非线性动力学行为的主要原因。微凸体的接触特性会直接影响粗糙表面结合面的接触特性,由于微凸体分布的复杂性和不确定性,以及对粗糙表面结合面进行实验研究的困难性,建立粗糙表面结合面处的力学模型以表征粗糙表面结合面处的复杂接触特性,一直是研究的难点所在。
3.建立粗糙表面结合面处的力学模型的重点在于建立接触刚度及接触阻尼解析模型。接触刚度和接触阻尼作为描述界面接触特性的重要参数之一,对工程结构的动力学性能有显著的影响。研究表明:工程结构总刚度的60%-80%、总阻尼的90%来源于界面接触刚度和接触阻尼,不准确的接触参数模型会对机械结构的动力学行为预测产生不可接受的误差。
4.现有技术中,通过建立粗糙表面结合面处的力学模型以预测粗糙表面微凸体法向接触刚度依然存在较大误差。由于,在承受较大载荷时,粗糙表面的微凸体发生严重变形,从而导致粗糙表面的法向接触刚度的精确度低,误差较大。
技术实现要素:
5.针对现有技术中存在的问题,本发明提出了一种考虑弹塑性状态粗糙表面接触刚度的预测方法及系统,通过划分微凸体接触状态区间,针对粗糙表面的不同接触状态分别进行建模,并且对该模型的有限元仿真验证,从而有效的提高了粗糙表面的法向接触刚度计算结果的精确度,且减小了误差。
6.本发明是通过以下技术方案来实现:
7.一种考虑弹塑性状态粗糙表面接触刚度的预测方法,其特征在于,包括,
8.s1、建立单一微凸体法向接触有限元模型,通过对单一微凸体法向接触有限元模型进行有限元仿真验证,计算得到单一微凸体法向接触有限元的仿真结果;
9.s2、根据s1中所述的单一微凸体法向接触的有限元仿真结果,确定微凸体的完全弹性变形阶段、弹塑性变形阶段及完全塑性变形阶段的分界点;通过自然对数函数的多项式表征微凸体弹塑性阶段接触载荷与法向变形量之间的关系并确定解析表达式,通过指数函数的多项式表征微凸体的弹塑性变形阶段接触面积与法向变形量之间的关系并确定解析表达式,并结合微凸体的完全弹性变形阶段及完全塑性变形阶段的解析表达式,建立单一微凸体法向接触解析模型;
10.s3、根据s1中所述的单一微凸体法向接触有限元模型,建立粗糙表面接触解析模
型的有限元模型;
11.s4、根据s2中所述的单一微凸体法向接触解析模型和s3中粗糙表面接触解析模型的有限元模型,建立粗糙表面法向接触解析模型;
12.s5、根据s3中所述的粗糙表面接触解析模型的有限元模型对s4中所述的粗糙表面接触解析模型的进行有限元仿真验证,获得粗糙表面的接触载荷及接触面积,通过分析计算得到粗糙表面法向接触刚度。
13.优选的,s1中建立单一微凸体法向接触有限元模型,具体过程为:
14.建立微凸体与刚性平面接触的有限元模型,约束微凸体上表面自由度,给刚性平面施加向上的位移边界条件模拟微凸体受载,得到单一微凸体受法向载荷时的接触状态变化规律,依据变化规律划分各个接触区间,得到单一微凸体法向接触有限元模型。
15.优选的,s2中所述自然对数函数的多项式的表达式为:
16.a
1 lnδ a2δ a317.其中:利用对数项a
1 lnδ控制拟合曲线的基本形状;加入一次项a2δ来满足光滑性条件;加入常数项a3来满足连续性条件,a1、a2和a3为待定系数。
18.优选的,s2中所述指数函数的多项式的表达式为:
[0019][0020]
其中:利用指数项c1e
δ
控制拟合曲线的基本形状;加入反比例项来满足光滑性条件;加入常数项c3来满足连续性条件,c1、c2和c3为待定系数。
[0021]
优选的,s2中采用赫兹理论确定微凸体的完全弹性变形阶段和完全塑性变形阶段的解析表达式。
[0022]
优选的,s3中建立粗糙表面接触解析模型的有限元模型,具体过程为:
[0023]
采用matlab编程模拟生成粗糙表面点云矩阵,将生成的粗糙表面点云矩阵导入solidworks建立粗糙表面的几何模型,再将粗糙表面的几何模型导入到abaqus商用有限元软件中,建立粗糙表面接触解析模型的有限元模型。
[0024]
优选的,s4中所述的粗糙表面接触解析模型,具体过程为:
[0025]
提取粗糙表面接触解析模型的有限元模型的x轴及y轴方向的二维形貌曲线,计算得到形貌曲线的统计学参数取平均,得到微凸体高斯分布函数和粗糙表面的微凸体等效及微凸体的密度;利用微凸体高斯分布函数分别对完全弹性变形阶段、弹塑性变形阶段和完全塑性变形阶段的微凸体的接触载荷及接触面积,积分至整个粗糙表面,得到整个粗糙表面的接触载荷及接触面积与法向变形之间的关系,再结合粗糙表面的微凸体等效及密度,从而建立粗糙表面法向接触解析模型。
[0026]
优选的,所述整个粗糙表面的接触载荷及接触面积,具体计算公式为:
[0027]
完全弹性变形阶段:
[0028]
当0≤δ<δc时,
[0029][0030]
[0031]
弹塑性第一变形阶段:
[0032]
当δc≤δ<6δc时,
[0033][0034][0035]
弹塑性第二变形阶段:
[0036]
当6δc≤δ<110δc时,
[0037][0038][0039]
完全塑性变形阶段:
[0040]
当110δc≤δ<l时,
[0041][0042][0043]
其中:δ为微凸体法向变形量;δc为微凸体弹性阶段转变为弹塑性第一阶段的临界变形量;6δc为微凸体为弹塑性第一阶段转变为弹塑性第二阶段的临界变形量;δ
p
=110δc为微凸体为弹塑性第二阶段转变为塑性阶段的临界变形量;微凸体法向载荷f=a
·
p;l为微凸体高度,d为法向接近量,l-d=δ,微凸体法向变形等于微凸体高度减去法向接近量,其中l=3σ,即微凸体最大高度;g(z)为高斯函数;a为粗糙表面的实际接触面积;f为粗糙表面的总接触载荷;n为粗糙表面上微凸体的数目;ae为弹性阶段微凸体接触面积;a
ep1
为弹塑性第一阶段微凸体接触面积;a
ep2
为弹塑性第二阶段微凸体接触面积;a
p
为塑性阶段微凸体接触面积;fe为弹性阶段微凸体接触载荷;f
ep1
为弹塑性第一阶段微凸体接触载荷;f
ep2
为弹塑性第二阶段微凸体接触载荷;f
p
为塑性阶段微凸体接触载荷。
[0044]
优选的,s5中所述的粗糙表面接触解析模型的进行有限元仿真验证,具体过程为:
[0045]
对粗糙表面接触解析模型的有限元模型赋予材料属性及边界条件,从而对粗糙表面接触解析模型的有限元模型进行仿真验证,获取粗糙表面的接触载荷及接触面积,将粗糙表面接触解析模型与粗糙表面接触解析模型的有限元模型进行对比,验证粗糙表面接触解析模型的准确性,通过分析粗糙表面接触解析模型的接触载荷及接触面积与法向变形的曲线得到粗糙表面法向接触刚度。
[0046]
一种考虑弹塑性状态粗糙表面接触刚度的预测系统,包括模型建立模块,计算模
块,仿真验证模块;
[0047]
所述模型建立模块用于建立单一微凸体法向接触有限元模型,单一微凸体法向接触解析模型,粗糙表面接触解析模型的有限元模型以及粗糙表面法向接触解析模型;
[0048]
所述计算模块用于计算得到单一微凸体法向接触有限元的仿真结果以及计算得到粗糙表面法向接触刚度;
[0049]
所述仿真验证模块用于对单一微凸体法向接触有限元模型进行有限元仿真验证以及对粗糙表面接触解析模型的进行有限元仿真验证。
[0050]
与现有技术相比,本发明具有以下有益的技术效果:
[0051]
本发明提出了一种考虑弹塑性状态粗糙表面接触刚度的预测方法及系统,通过根据单一微凸体有限元仿真结果划分微凸体接触状态区间,对粗糙表面的不同接触状态分别进行建模,并对该模型进行有限元仿真验证,从而有效的提高了粗糙表面的法向接触刚度计算结果的精确度,减小了误差;本发明还充分考虑了粗糙表面微凸体间的不同接触状态之间的相互影响,从而对粗糙表面的法向接触刚度产生的影响,克服了承受较大载荷时,微凸体表面发生严重变形,导致粗糙表面的法向接触刚度计算结果不准确的缺点。同时,本发明的通过建立自然对数函数的多项式表征微凸体弹塑性变形阶段的接触载荷与法向变形量关系,通过建立指数函数的多项式表征微凸体的弹塑性变形阶段接触面积与法向变形量之间的关系,从而建立微凸体弹塑性状态接触解析模型,再结合弹性状态及塑性状态解析模型,建立单一微凸体接触解析模型,利用高斯分布函数积分至整个粗糙表面,得到整个粗糙表面的接触解析模型,该粗糙表面的接触解析模型可以准确的计算预测粗糙表面微凸体的法向接触刚度,对实现机械结构动力学行为的预测具有重要的理论与工程意义。此外,本发明设计的模型是解析的,形式简单,具有可靠性、准确性高等特点,有利于表征金属粗糙表面法向接触载荷及接触面积与法向变形之间的关系,从而提高粗糙表面的法向接触刚度计算结果的准确性。
[0052]
进一步,本发明同时考虑了完全弹性、弹塑性和完全塑性三种接触状态,并考虑了微凸体弹塑性状态时塑性区域的演化规律,对完全弹性变形阶段和完全塑性变形阶段分别采用经典弹性接触和塑性接触的解析公式进行建模,提高了建模方法的可靠性和准确性,从而进一步提高了粗糙表面的法向接触刚度计算结果的准确性。
[0053]
进一步,本发明基于粗糙表面微凸体的高斯分布,利用概率统计分析的方法建立了粗糙表面法向接触模型。与其他相关模型进行对比,本发明避免了高次多项式插值产生的龙格效应以及在接触状态改变时的不连续不光滑问题,同时本发明模型是解析的,形式简单,有效的解决了在承受较大载荷时,粗糙表面的微凸体发生严重变形得到情况下,保证了粗糙表面的法向接触刚度的精确度和误差较小,在机械结构的动力学领域具有重要的工程应用价值。
附图说明
[0054]
图1为本发明的技术路线;
[0055]
图2为单一微凸体接触示意图;
[0056]
图3为弹塑性阶段接触压力拟合示意图;
[0057]
图4为弹塑性阶段接触面积拟合示意图;
[0058]
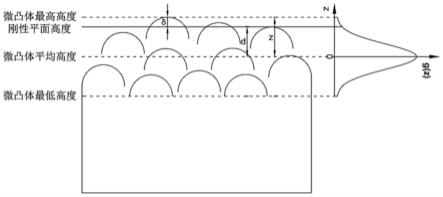
图5为粗糙表面微凸体高斯分布示意图;
[0059]
图6为单一微凸体有限元模型;
[0060]
图7为微凸体塑性区域演化规律;
[0061]
图8为单一微凸体有限元模型接触状态曲线;
[0062]
图9为微凸体解析模型与有限元模型对比;
[0063]
图10为粗糙表面matlab形貌;
[0064]
图11为粗糙表面几何模型;
[0065]
图12为粗糙表面有限元模型;
[0066]
图13为粗糙表面有限元模型接触状态变化过程;
[0067]
图14为粗糙表面有限元模型接触状态计算结果;
[0068]
图15为粗糙表面解析模型与有限元模型对比。
具体实施方式
[0069]
下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
[0070]
参考图1为本发明的整体实施方案技术路线;
[0071]
本发明提供一种考虑弹塑性状态粗糙表面接触刚度的预测方法及系统,具体涉及一种基于赫兹接触理论且考虑微凸体弹塑性接触状态,服从高斯分布的金属粗糙表面法向接触解析模型,并给出该模型的有限元仿真验证方法。根据单一微凸体有限元仿真结果划分微凸体接触状态区间,应用本发明的基于自然对数函数的多项式表征微凸体弹塑性阶段接触载荷与法向变形量关系的方法,建立微凸体弹塑性状态接触解析模型,再结合弹性状态及塑性状态解析模型,建立单一微凸体接触解析模型,利用高斯分布函数积分至整个粗糙表面,得到整个粗糙表面的接触解析模型。最后与利用abaqus商用有限元软件建立的粗糙表面接触有限元模型计算结果进行对比,从而有效的提高了粗糙表面的法向接触刚度计算结果的精确度,减小了误差;本发明还充分考虑了粗糙表面微凸体间的不同接触状态之间的相互影响,从而对粗糙表面的法向接触刚度产生的影响,克服了承受较大载荷时,微凸体表面发生严重变形,导致粗糙表面的法向接触刚度计算结果不准确的缺点。
[0072]
本发明提出的一种考虑弹塑性状态粗糙表面接触刚度的预测方法,按以下具体步骤实施:
[0073]
(1)单一微凸体法向接触有限元模型建模,通过对单一微凸体法向接触有限元模型进行有限元仿真验证,计算得到单一微凸体法向接触有限元的仿真结果;
[0074]
建立微凸体与刚性平面接触有限元模型,约束微凸体上表面自由度,给刚性平面施加向上的位移边界条件模拟微凸体受载,可以得出单一微凸体受法向载荷时的接触状态变化规律,依据变化规律划分各个接触区间。
[0075]
(2)单一微凸体法向接触解析模型建模
[0076]
根据单一微凸体法向接触的有限元仿真结果,确定微凸体的完全弹性变形阶段、弹塑性变形阶段及完全塑性变形阶段的分界点;通过自然对数函数的多项式表征微凸体弹塑性阶段接触载荷与法向变形量之间的关系并确定解析表达式,通过指数函数的多项式表征微凸体的弹塑性变形阶段接触面积与法向变形量之间的关系并确定解析表达式,并结合
微凸体的完全弹性变形阶段及完全塑性变形阶段的解析表达式,建立单一微凸体法向接触解析模型;
[0077]
将粗糙表面看作由具有统计学概率分布特性的微凸体组成,单一微凸体变形示意图如图2所示:
[0078]
(a)完全弹性阶段
[0079]
在完全弹性阶段,根据赫兹接触理论,微凸体的接触面积ae和平均接触压力pe与法向形变量δ之间的关系可以表示为:
[0080]ae
=πrδ
[0081][0082]
式中:r为微凸体顶端等效曲率半径;k硬度系数:k=0.454 0.41ν;
[0083]
h为较软材料的硬度。
[0084]
当法向形变量增大到弹性临界变形量δc时,微凸体将开始产生塑性变形。δc与较软材料的材料参数相关,表达式如下:
[0085][0086]
式中:e为微凸体的等效弹性模量,
[0087]
(b)弹塑性阶段
[0088]
为了解决现有接触压力模型存在不连续不光滑的问题,本文提出基于自然对数函数的多项式来表述弹塑性阶段接触压力的变化曲线,弹塑性阶段划分为两段,如图3所示。分别使用形如:a1lnδ a2δ a3自然对数函数多项式拟合弹塑性两个阶段的压力曲线。
[0089]
具体计算过程为:
[0090]
利用形如a
1 lnδ a2δ a3的自然对数函数多项式拟合弹塑性第一变形阶段和弹塑性第二变形阶段两个变形阶段的压力曲线;其中:利用对数项a
1 lnδ控制拟合曲线的基本形状;加入一次项a2δ来满足光滑性条件;加入常数项a3来满足连续性条件,a1、a2和a3为待定系数。
[0091]
弹塑性第一变形阶段:
[0092]
当δc≤δ≤6δc时:
[0093]
p
ep1
=a1lnδ a2δ a3[0094]
根据连续性和光滑性条件:
[0095]
pe(δc)=p
ep1
(δc)
[0096]
p
ep1
(δc)=p
ep2
(δc)
[0097]
p
ep2
(δ
p
)=p
p
(δ
p
)
[0098]
得到式中:
[0099][0100]
弹塑性第二变形阶段:
[0101]
当6δc≤δ≤110δc时:
[0102]
p
ep2
=b
1 lnδ b2δ b3[0103]
根据连续性和光滑性条件得到式中:
[0104][0105]
式中:δ为微凸体法向变形量;δc为微凸体弹性阶段转变为弹塑性第一阶段的临界变形量;6δc为微凸体为弹塑性第一阶段转变为弹塑性第二阶段的临界变形量;δ
p
=110δc为微凸体为弹塑性第二阶段转变为塑性阶段的临界变形量;pe为弹性阶段微凸体接触压力;p
ep1
为弹塑性第一阶段微凸体接触压力;p
ep2
为弹塑性第二阶段微凸体接触压力;p
p
为塑性阶段微凸体接触压力。
[0106]
同理,为了解决现有接触面积模型存在不连续不光滑的问题,本文提出基于指数函数的多项式来表述弹塑性阶段接触压力的变化曲线,弹塑性阶段划分为两段,如图4所示。分别使用形如:的指数函数多项式拟合弹塑性两个阶段的接触面积曲线。
[0107]
利用形如的指数函数多项式拟合弹塑性两个阶段的接触面积曲线;其中:利用指数项c1e
δ
控制拟合曲线的基本形状;加入反比例项来满足光滑性条件;加入常数项c3来满足连续性条件,c1、c2和c3为待定系数。
[0108]
弹塑性第一变形阶段:
[0109]
当δc≤δ≤6δc时:
[0110][0111]
根据连续性和光滑性条件:
[0112]ae
(δc)=a
ep1
(δc)
[0113]aep1
(δc)=a
ep2
(δc)
[0114]aep2
(δ
p
)=a
p
(δ
p
)
[0115]
得到式中:
[0116]
[0117][0118]
弹塑性第二变形阶段:
[0119]
当6δc≤δ≤110δc时:
[0120][0121]
根据连续性和光滑性条件得到式中:
[0122][0123]
(c)完全塑性状态
[0124]
当法向变形量大于临界变形量δ
p
,即110倍δc时,微凸体进入完全塑性状态,此时微凸体接触区域的平均压力等于较软材料的硬度。微凸体的接触面积a
p
和平均接触压力p
p
与法向形变量δ之间的关系可以表示为:
[0125]ap
=2πrδ
[0126]
p
p
=h
[0127]
(3)粗糙便面接触解析模型的有限元仿真验证
[0128]
以二维数字滤波法生成方形粗糙表面,利用matlab生成粗糙表面点云,将点云矩阵导入solidworks进行几何建模;将所建立的粗糙表面几何模型导入到abaqus商用有限元软件建立粗糙便面接触解析模型的有限元模型。在粗糙表面上表面与刚性平面下表面添加frictionless接触,粗糙表面模型下端添加固定约束。并对有限元模型进行网格划分,固定模型下端,利用刚性平面向下压缩粗糙表面,得到粗糙表面法向接触载荷及接触面积与形变之间的关系。本发明同时考虑了完全弹性、弹塑性和完全塑性三种接触状态,并考虑了微凸体弹塑性状态时塑性区域的演化规律,对完全弹性变形阶段和完全塑性变形阶段分别采用经典弹性接触和塑性接触的解析公式进行建模,提高了建模方法的可靠性和准确性,从而进一步提高了粗糙表面的法向接触刚度计算结果的准确性。
[0129]
(4)粗糙表面法向接触解析模型建模方法
[0130]
(a)参数计算
[0131]
提取粗糙表面有限元模型x及y方向多条二维形貌曲线,计算得到形貌曲线的统计学参数,得到微凸体高斯分布函数。将粗糙表面形貌曲线的统计学参数带入下式,计算得到粗糙表面的微凸体等效及密度;
[0132][0133]
其中,r为微凸体顶端等效曲率半径,σ
′
为二维形貌曲线的均方根斜率;σ
″
为二维形貌曲线的均方根曲率。
[0134][0135]
其中,ρ为微凸体的密度,σ
′
为二维形貌曲线的均方根斜率,σ
″
为二维形貌曲线的均方根曲率。
[0136]
作为本发明的优选实施方式,提取粗糙表面有限元模型x及y方向各5条二维形貌曲线;
[0137]
(b)模型建立
[0138]
假设粗糙表面微凸体高度服从高斯分布,如图5所示,最高微凸体高度为3σ。粗糙表面的总接触载荷是所有接触微凸体上的接触面积和接触载荷之和。采用gw模型建模中提出的概率统计分析的方法,在给定的法向接近量d下,分别对完全弹性、弹塑性变形和完全塑性变形的微凸体的接触面积和接触载荷模型,利用高斯分布函数依据微凸体接触状态,分段积分至整个粗糙表面,可得到整个粗糙表面的接触面积、接触载荷为:
[0139]
完全弹性变形阶段:
[0140]
当0≤δ<δc时:
[0141][0142][0143]
弹塑性第一变形阶段
[0144]
当δc≤δ<6δc时:
[0145][0146][0147]
弹塑性第二变形阶段:
[0148]
当6δc≤δ<110δc时:
[0149][0150][0151]
完全塑性变形阶段:
[0152]
当110δc≤δ<l时:
[0153]
[0154][0155]
其中:δ为微凸体法向变形量;δc为微凸体弹性阶段转变为弹塑性第一阶段的临界变形量;6δc为微凸体为弹塑性第一阶段转变为弹塑性第二阶段的临界变形量;δ
p
=110δc为微凸体为弹塑性第二阶段转变为塑性阶段的临界变形量;微凸体法向载荷f=a
·
p;l为微凸体高度,d为法向接近量,l-d=δ,微凸体法向变形等于微凸体高度减去法向接近量,其中l=3σ,即为微凸体最大高度;g(z)为高斯函数;a为粗糙表面的实际接触面积;f为粗糙表面的总接触载荷;n为粗糙表面上微凸体的数目;ae为弹性阶段微凸体接触面积;a
ep1
为弹塑性第一阶段微凸体接触面积;a
ep2
为弹塑性第二阶段微凸体接触面积;a
p
为塑性阶段微凸体接触面积;fe为弹性阶段微凸体接触载荷;f
ep1
为弹塑性第一阶段微凸体接触载荷;f
ep2
为弹塑性第二阶段微凸体接触载荷;f
p
为塑性阶段微凸体接触载荷。
[0156]
此外,本发明设计的模型是解析的,形式简单,具有可靠性、准确性高等特点,有利于表征金属粗糙表面法向接触载荷及接触面积与法向变形之间的关系,从而提高粗糙表面的法向接触刚度计算结果的准确性。
[0157]
本发明基于粗糙表面微凸体的高斯分布,利用概率统计分析的方法建立了粗糙表面法向接触模型。与其他相关模型进行对比,本发明避免了高次多项式插值产生的龙格效应以及在接触状态改变时的不连续不光滑问题,同时本发明模型是解析的,形式简单,有效的解决了在承受较大载荷时,粗糙表面的微凸体发生严重变形得到情况下,保证了粗糙表面的法向接触刚度的精确度和误差较小,在机械结构的动力学领域具有重要的工程应用价值。
[0158]
粗糙表面接触解析模型的进行有限元仿真验证,具体过程为:对粗糙表面接触解析模型的有限元模型赋予材料属性及边界条件,从而对粗糙表面接触解析模型的有限元模型进行仿真验证,获取粗糙表面的接触载荷及接触面积,将粗糙表面接触解析模型与粗糙表面接触解析模型的有限元模型进行对比,验证粗糙表面接触解析模型的准确性,通过分析粗糙表面接触解析模型的接触载荷及接触面积与法向变形的曲线得到粗糙表面法向接触刚度。
[0159]
一种考虑弹塑性状态粗糙表面接触刚度的预测系统,包括模型建立模块,计算模块和仿真验证模块;
[0160]
所述模型建立模块用于建立单一微凸体法向接触有限元模型,单一微凸体法向接触解析模型,粗糙表面接触解析模型的有限元模型以及粗糙表面法向接触解析模型;
[0161]
所述计算模块用于计算得到单一微凸体法向接触有限元的仿真结果以及计算得到粗糙表面法向接触刚度;
[0162]
所述仿真验证模块用于对单一微凸体法向接触有限元模型进行有限元仿真验证以及对粗糙表面接触解析模型的进行有限元仿真验证。
[0163]
以下给出一个具体应用实例,同时验证本发明在建立粗糙表面接触解析模型及有限元仿真中的有效性:
[0164]
第一步:单一微凸体法向接触有限元模型建模。建立微凸体与刚性平面接触的有限元模型,微凸体是对称结构,取其1/4进行建模,微凸体为半径取6μm,材料为硬铝合金,弹
性模量为70gpa,泊松比为0.3,屈服强度为300mpa,有限元模型如图6所示。约束微凸体上表面自由度,给刚性平面施加向上的位移边界条件模拟微凸体受载,微凸体屈服演化过程如图7所示,计算得到单一微凸体法向接触有限元的仿真结果;
[0165]
根据有限元结果可见,当法向变形量达到δc时,微凸体开始产生塑性屈服,塑性屈服首先发生在微凸体内部,当法向变形量增大到6δc时,塑性屈服区域扩展到微凸体表面,法向变形量继续增大,微凸体塑性屈服区域在微凸体表面逐渐延伸。1/4微凸体有限元模型接触面积和接触压力曲线如图8所示;
[0166]
第二步:单一微凸体法向接触解析模型建模。基于自然对数函数的多项式表征微凸体弹塑性阶段接触载荷与法向变形量之间的关系并确定解析表达式,结合微凸体弹性阶段及塑性阶段的解析表达式,建立单一微凸体法向接触解析模型,并将解析模型计算结果与单一微凸体有限元仿真结果对比,通过对比有限元模型与解析模型计算得到的接触面积及法向接触压力曲线如图9所示,解析模型计算结果与单一微凸体有限元仿真结果十分吻合;
[0167]
第三步:粗糙表面接触解析模型的有限元仿真验证。图10、图11及图12为粗糙表面接触有限元模型建模过程,采用matlab编程模拟具有统计学特性的粗糙表面,在将生成的粗糙表面点云矩阵导入solidworks建立粗糙表面的几何建模,将几何模型导入到abaqus商用有限元软件建立有限元模型并对模型赋予材料属性及边界条件。固定模型下端,利用刚性平面向下压缩粗糙表面,粗糙表面微凸体变形情况,从图13中可知,随着法向载荷的增加,发生接触塑性变形的微凸体也数目逐渐增多,对有限元模型接触面各个节点接触状态求和得到粗糙表面法向接触面积及接触载荷与形变之间的关系,如图14所示;
[0168]
第四步:粗糙表面法向接触解析模型建模。提取有限元粗糙表面x及y方向各5条二维形貌曲线,计算出二维形貌曲线的统计学参数求平均,得到微凸体高斯分布函数。采用gw模型建模中提出的概率统计分析的方法,分别对完全弹性、弹塑性变形和完全塑性变形的微凸体的接触载荷及接触面积模型利用高斯分布函数,分段积分至整个粗糙表面,得到整个粗糙表面的接触载荷与法向变形之间的关系,并与粗糙表面有限元接触模型对比,如图15所示,从图中可以看出本发明粗糙表面法向接触解析模型与粗糙表面接触状态解析模型(1/4fem模型)十分吻合,验证了本发明粗糙表面法向接触解析模型的准确性。
[0169]
尽管以上结合附图对本发明的实施方案进行了描述,但是本发明并不局限于上述的具体实施方案和应用领域,上述的具体实施方案仅仅是示意性的、指导性的,而不是限制性的。本领域的普通技术人员在说明书的启示下,在不脱离本本发明权利要求所保护的范围的情况下,还可以做出很多种的形式,这些均属于本本发明保护之列。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。