1.本实用新型涉及一种地面清洁装置的出水系统,本实用新型还涉及应用该出水系统的地面清洁装置。
背景技术:
2.目前家用洗地机的清洁方式主要有两种,一种是采用棍布转动的方式进行清洁,另一种是采用水气旋方式进行清洁。对于棍布方式的洗地机,其中的滚刷需要经常清洁并且时间长会产生异味。
3.授权公告号为cn215838844u(申请号为202121683432.9)的中国实用新型专利《一种用于清洁机的清洁模块及清洁机》,其中公开的清洁机即采用水气旋的清洗方式进行地面的清洁。水气旋的清洗方式主要是通过水冲刷地面带动地面的灰尘等垃圾上浮,然后通过强吸力电机将垃圾吸进污水桶。因为采用水气旋的方式清洁,气旋刷头不存在残留垃圾的现象,并且通过自清洁的模式后非常干净。但现在存在的问题是:水气旋出水采用蠕动泵的结构形式,开机后,往前推则泵出水,出水的速度是一样的且一直连续出水,直到往后退时水关闭。在后退的过程中前刮条刮地能力不足,很容易造成残留水,影响体验。
技术实现要素:
4.本实用新型所要解决的第一个技术问题是针对上述现有技术提供一种能够根据行进速度自动调整出水量的清洁机的出水系统。
5.本实用新型所要解决的第二个技术问题是针对上述现有技术提供一种能有效避免残留水,减少用水量的清洁机。
6.本实用新型解决上述第一个技术问题所采用的技术方案为:一种清洁机的出水系统,其特征在于:包括
7.检测模块,用于检测行走轮的转速;
8.蠕动泵,入口与水源相连接而用于供水;
9.喷水模块,与蠕动泵的出口相连接,用于向外喷水;
10.控制电路板,分别与检测模块、蠕动泵电信号连接,所述控制电路板根据检测模块的检测数据控制蠕动泵的开、关。
11.结构简单地,所述检测模块包括沿行走轮周向设置的多个磁性件,以及靠近行走轮设置且能检测到磁性件的磁性信号的霍尔传感器,所述霍尔传感器与控制电路板电信号连接。
12.优选地,所述霍尔传感器包括两个霍尔元件。
13.优选地,所述行走轮的内侧设有环形的安装槽,所述磁性件均匀分布设置在安装槽外环周壁的内壁上。
14.为了方便实现磁性件的快速定位安装,所述安装槽内沿周向均匀设置有多条径向延伸的轮毂,所述磁性件贴靠轮毂设置。
15.优选地,所述喷水模块包括喷嘴件和连接管,所述喷嘴件沿出水宽度方向延伸,所述喷嘴件内具有水流通道,所述喷嘴件的侧壁上开有与水流通道相连通的进水口,所述喷嘴件的下表面上设有与水流通道相连通的喷口;所述连接管连接在喷嘴件的进水口和蠕动泵的出口之间。
16.为了能够使得分配至各喷口位置的水流量相当,所述喷嘴件内设置有向各喷口导流的导流筋。
17.方便组装地,所述喷嘴件包括上下对合的第一构件和第二构件。
18.本实用新型解决上述第二个技术问题所采用的技术方案为:一种清洁机,包括机壳,转动连接在机壳两侧的行走轮,其特征在于:还包括如前述的清洁机的出水系统,所述蠕动泵、喷水模块、控制电路板均设置在机壳内。
19.与现有技术相比,本实用新型的优点在于:本实用新型中的清洁机的出水系统,通过检测模块检测的行走速度数据来控制蠕动泵的出水量,如此使得蠕动泵的出水量能够与清洁机的行走速度相匹配,解决了现有蠕动泵按照固定出水量出水带来的残留水的问题。
20.而应用了该出水系统的清洁机,节省了清洁过程中的水量,同时可避免地面出现残留水的问题,用户体验更好。
附图说明
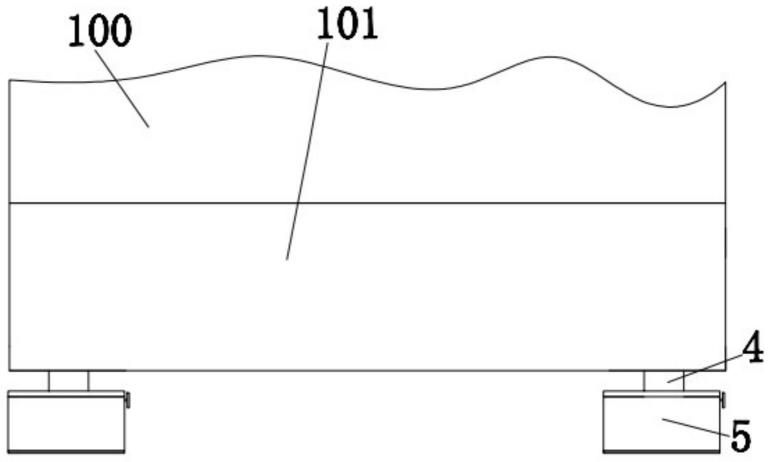
21.图1为本实用新型实施例中清洁机的立体图。
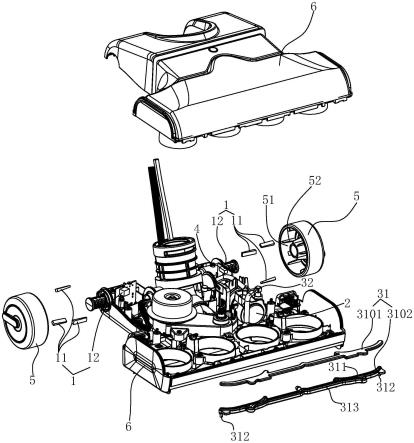
22.图2为本实用新型实施例中清洁机的立体分解图。
23.图3为图2的另一视角图
具体实施方式
24.以下结合附图实施例对本实用新型作进一步详细描述。
25.本实施例中的清洁机的出水系统,可以应用在现有的各种清洁机中,如可以应用在扫地机、洗地机、拖地机等各种清洁机中。
26.如图1所示,清洁机包括机壳6,转动连接在机壳6两侧的行走轮5,以及下述的清洁机的出水系统。
27.如图2和图3所示,该清洁机的出水系统包括检测模块1、蠕动泵2、喷水模块3、控制电路板4,其中检测模块1、蠕动泵2分别与控制电路板4电信号连接。
28.检测模块1用于检测行走轮5的转速,基于不同类型的清洁机,可以选择使用与之相匹配的检测模块1。本实施例中的检测模块1包括沿行走轮5周向设置的多个磁性件11以及靠近行走轮5而设置在机壳6内的霍尔传感器12。其中磁性件11的数量根据行走轮5的直径以及对蠕动泵2的控制精度具体设置,本实施例中设置有三个磁性件11。霍尔传感器12与控制电路板4电信号连接,为了节省空间,同时方便霍尔传感器12与控制电路板4的通电连接,本实施例中的将霍尔传感器12直接设置在控制电路板4上,而控制电路板4则固定在机壳6内。霍尔传感器12可以检测各磁性件11的磁性信号,根据检测的磁性信号的频率,控制电路板4根据霍尔传感器12获取的磁性信号的频率来计算行走轮5的转速。通常机壳6的两侧均设置有行走轮5,当具有两个行走轮5时,可以仅在一个行走轮5位置安装检测模块1,也可以在各行走轮5位置均安装检测模块1。
29.具体地,行走轮5的内侧设有环形的安装槽51,磁性件11均匀分布设置在安装槽51外环周壁的内壁上。由于磁性件11需要均匀的沿周向设置,如此以获取更准确的检测数据,本实施例中,为了方便实现磁性件11的快速定位安装,且能保证磁性件11分布位置的均匀性,安装槽51内沿周向均匀设置有多条径向延伸的轮毂52,轮毂52的数量可以设为磁性件11的整数倍,如此磁性件11贴靠轮毂52设置,通过轮毂52能够实现磁性件11的快速定位安装。
30.由于清洁机在使用时,通常在后退过程中停止喷水,因此本实施例中的霍尔传感器12包括两个霍尔元件,两个霍尔元件均与控制电路板4电信号连接,由于两个霍尔元件位置有差异,使得两个霍尔元件检测出的磁性信号时序有差异,进而控制电路板4可以根据两个霍尔元件检测的磁性信号波形时序差异来判断行走轮的运动方向,判断当前行走轮5的行走方向为前进方向或者后退方向。同时控制电路板4还可以根据霍尔传感器12检测到的磁性波形来计算行走轮5的移动速度。如此控制电路板4在判断行走轮5前进时控制蠕动泵2的开关,进而控制喷水量。而当判断行走轮5后退时,则控制电路板4控制蠕动泵2停止工作,进而使得清洁机在后退时不再进行喷水动作。
31.蠕动泵2设置在机壳6内,根据具体的需要选择现有的蠕动泵2产品的具体类型。蠕动泵2入口与水源相连接而用于供水,通常清洁机上会配备水箱,如此蠕动泵2的入口则能通过进水管实现与水箱的连接。当然也可以有其他方式的供水结构,如蠕动泵2的入口直接通过水管连接水龙头等。只要蠕动泵2的入口能接入水源即可。蠕动泵2的出口与喷水模块3相连接,如此在蠕动泵2打开的情况下,在蠕动泵2的作用下能够将水泵入喷水模块3中,喷水模块3向清扫地面出水。
32.喷水模块3设置在机壳6内,该喷水模块3包括喷嘴件31和连接管32,喷嘴件31沿出水宽度方向延伸,喷嘴件31内具有水流通道311,喷嘴件31的侧壁上开有与水流通道311相连通的进水口,喷嘴件31的下表面上设有与水流通道311相连通的喷口312。由于机壳6通常具有一定的厚度,为了使得喷口312位置接近地面,从而发挥更好的清洁效果,也可以在喷嘴件31的下表面上向下延伸设置喷嘴,喷嘴中空设置而与水流通道311相连通,进而形成喷口312。连接管32连接在喷嘴件31的进水口和蠕动泵2的出口之间。为了能够使得分配至各喷口312位置的水流量相当,喷嘴件31内设置有向各喷口312导流的导流筋313,喷嘴件31上沿水流方向通常设置有多个喷口312,如果将水流通道311设置为直线通道,则会出现下游喷口312无法出水的情况,因此对应于上游的各喷口312,通过导流筋313在喷口312下游的位置点设置向后回流的导流筋313进而导向喷口312,如此水流不仅能够顺利流向下游的喷口312,也能分流一部分经回流的导流筋313而流至上游的喷口312位置。
33.方便组装地,本实施例中的喷嘴件31包括上下对合的第一构件3101和第二构件3102。
34.该清洁机的出水系统的工作过程为:当用户向前推动清洁机时,行走轮5向前转动,霍尔传感器12通过检测磁性件11的信号来获取行走轮5的转动速度,控制电路板4根据转动速度控制出水量,如当行走轮5的转速较慢时,可以控制蠕动泵2工作,进而泵出较少的出水量,当行走轮5转速较快时,可以控制蠕动泵2工作进而泵出较大的出水量。而本实施例中,控制电路板4可以直接根据霍尔传感器12检测的磁性件11的磁性信号时机控制蠕动泵2的开、关。即当检测到磁性件11的磁性信号时,则控制蠕动泵2打开,蠕动泵2按照设定的单
位出水量泵水,当无法检测到磁性件11信号时,则控制蠕动泵2关闭。如此基于行走轮5的前进转动过程,控制蠕动泵2的开、关,相应实现了对出水量的控制。而当控制电路板4基于霍尔传感器12的信号判断行走轮5后退时,则控制蠕动泵2关闭,不再进行泵水工作。通过霍尔传感器12检测到磁性件11的磁性信号直接控制蠕动泵2的开关可以避免行走轮5突然后退时,蠕动泵2没有关掉的缓冲时间。而本实施例中,由于霍尔传感器12处于在两个磁性件11间隔范围内时,蠕动泵2处于关闭状态,则相当于有了缓冲时间提前关水,在无需预判行走轮5后退的情况下也能避免蠕动泵2仍然出水而在清洁机后退过程中在地面上喷出残留水的情况,提高了用户体验。
35.本实用新型中的清洁机的出水系统,通过检测模块1检测的行走速度数据来控制蠕动泵2的出水量,如此使得蠕动泵2的出水量能够与清洁机的行走速度相匹配,解决了现有蠕动泵2按照固定出水量出水带来的残留水的问题,使得清洁机在使用过程中更加省水,改善了中途频繁加水的情况。
36.在本发明的说明书及权利要求书中使用了表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”、“侧”、“顶”、“底”等,用来描述本发明的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明的目的,是基于附图中显示的示例方位而确定的。由于本发明所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制,比如“上”、“下”并不一定被限定为与重力方向相反或一致的方向。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。