1.本实用新型涉及养殖设备技术领域,具体为一种无人驾驶精准布料机。
背景技术:
2.畜牧业产业链条长,上连种植,下接屠宰加工,还能带动饲料工业、农机、环保等产业发展,在农业结构调整中是承前启后的纽带产业。我国的畜牧养殖饲喂机械装备水平、机械化程度较低,主要是机械设备品种较少,技术含量较低,工作效率低,劳动强度大,作业成本高,作业水平不能满足现代畜牧业的生产需求。
3.现有的各种形式的撒料车大多存在以下问题,一是需要相关工作人员进行操作,效率低下,耗费大量人力物力财力;二是动力输入为柴油机,造成污染严重,噪声大;三是不带称重系统,无法精准控制饲喂量,不能有效进行科学饲喂。
技术实现要素:
4.针对现有技术的不足,本实用新型提供一种无人驾驶精准布料机,用于解决上述背景技术所提出的问题。
5.本实用新型的无人驾驶精准布料机,包括牵引车头和撒料车;所述牵引车头内安装有集成系统,用于远程控制牵引车头的移动,所述撒料车包括物料存储箱,所述牵引车头与物料存储箱之间通过拖挂装置连接,所述物料存储箱靠近牵引车头的一侧设置有出料口,所述物料存储箱内靠近底部的位置处设置有第一物料传送平台,用于输出物料存储箱中存储的饲料,靠近所述出料口的位置处设置有第二物料传送平台,用于接收第一物料传送平台上的饲料并撒料,所述物料存储箱外侧设置有若干个称重传感器。
6.作为本实用新型的进一步改进,所述集成系统包括中央控制系统、自动驾驶系统、北斗导航系统、传感器数据处理系统以及人工辅助控制系统。
7.通过上述技术方案设计,能够实现自动驾驶目的,可远程控制该装置进行移动、添加饲料、输出饲料,使整个喂料过程变得自动化,减少人工成本,大大的提高了喂养效率。
8.作为本实用新型的进一步改进,所述物料存储箱的两侧均设置有第一导料板,所述第一导料板与物料存储箱内壁的之间的夹角为15
°‑
30
°
。
9.作为本实用新型的进一步改进,所述物料存储箱内部且靠近出料口的一端设置有第二导料板,所述第二导料板与物料存储箱内壁之间的夹角为30
°‑
60
°
。
10.通过上述技术方案设计,在向物料存储箱中补充饲料的时候能够对饲料起到导向作用,使饲料全部落入第一物料传送平台上,避免饲料浪费。
11.作为本实用新型的进一步改进,所述物料存储箱内部且靠近出料口的一侧设置有拨轮轴,所述拨轮轴的一端贯穿至物料存储箱的外侧并设置有连接部件。
12.作为本实用新型的进一步改进,所述连接部为齿轮传动组件,所述齿轮传动组件通过第一物料传送平台驱动。
13.通过上述技术方案设计,使拨轮轴转动的时候能够辅助饲料的输送。
14.作为本实用新型的进一步改进,所述物料存储箱底部设置有供电模块。
15.通过上述技术方案设计,使该装置使用过程低碳环保,不会对牧场造成污染,不影响动物的健康,解决了传统发电机造影大、污染大的问题。
16.作为本实用新型的进一步改进,所述物料存储箱外侧对应第二物料传送平台上方的位置处设置有防护罩。
17.通过上述技术方案,能够遮风避雨,避免物料被雨水或大风影响。
18.作为本实用新型的进一步改进,所述第一物料传送平台包括第一传送带、第一电机和第一传动辊筒组件,所述第一传送带设置在第一传动辊筒组件上,所述第一电机驱动第一传动辊筒组件转动。
19.作为本实用新型的进一步改进,所述第二物料传送平台包括第二传送带、第二电机和第二传动辊筒组件,所述第二传送带设置在第二传动辊筒组件上,所述第二电机驱动第二传动辊筒组件转动。
20.与现有技术相比,本实用新型的有益效果如下:
21.1、本实用新型通过在牵引车头中设置的集成系统,能够实现自动驾驶目的,可远程控制该装置进行移动、添加饲料、输出饲料,使整个喂料过程变得自动化,减少人工成本,大大的提高了喂养效率。
22.2、本实用新型通过供电模块进行驱动,采用可充电的蓄电池提供电能,使用过程低碳环保,不会对牧场造成污染,不影响动物的健康,解决了传统发电机造影大、污染大的问题。
23.3、通过设置的称重传感器,能够实时了解物料存储箱中剩余饲料的重量,和排放出去饲料的重量,实现精准布料的目的,提高饲料利用效率,避免饲料浪费。
附图说明
24.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
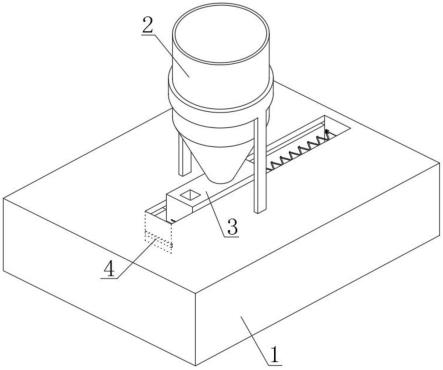
25.图1为本实用新型正面立体结构示意图;
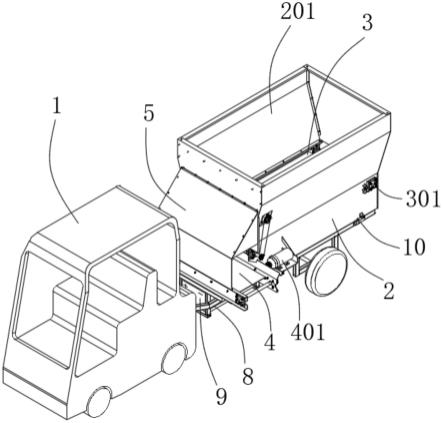
26.图2为本实用新型背面立体结构示意图;
27.图3为本实用新型仰视立体结构示意图;
28.图4为本实用新型俯视结构示意图。
29.图中:1、牵引车头;2、物料存储箱;201、第一导料板;202、第二导料板;3、第一物料传送平台;301、第一电机;4、第二物料传送平台;401、第二电机;5、防护罩;6、拨轮轴;7、连接部件;8、拖挂装置;9、供电模块;10、称重传感器。
具体实施方式
30.以下将以图示揭露本实用新型的多个实施方式,为明确说明起见,许多实物上的细节将在以下叙述中一并说明。然而,应了解到,这些实物上的细节不应用以限制本实用新型。也就是说,在本实用新型的部分实施方式中,这些实物上的细节是非必要的。此外,为简化图示起见,一些习知惯用的结构与组件在图示中将以简单的示意的方式绘示之。
31.另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术
人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
32.请参阅图1-4,本实用新型的无人驾驶精准布料机,包括牵引车头1和撒料车,牵引车头1内安装有集成系统,用于远程控制牵引车头1的移动,撒料车包括物料存储箱2,牵引车头1与物料存储箱2之间通过拖挂装置8连接,物料存储箱2靠近牵引车头1的一侧设置有出料口,物料存储箱2内靠近底部的位置处设置有第一物料传送平台3,用于输出物料存储箱2中存储的饲料,靠近出料口的位置处设置有第二物料传送平台4,用于接收第一物料传送平台3上的饲料并撒料,物料存储箱2外侧设置有四个称重传感器10,且四个称重传感器10分别设置在物料存储2底部且靠近四角的位置处。
33.集成系统包括中央控制系统、自动驾驶系统、北斗导航系统、传感器数据处理系统以及人工辅助控制系统,能够实现自动驾驶目的,可远程控制该装置进行移动、添加饲料、输出饲料,使整个喂料过程变得自动化,减少人工成本,大大的提高了喂养效率。
34.请参阅图2物料存储箱2的两侧均设置有第一导料板201,第一导料板201与物料存储箱2内壁的之间的夹角为15
°‑
30
°
,物料存储箱2内部且靠近出料口的一端设置有第二导料板202,第二导料板202与物料存储箱2内壁之间的夹角为30
°‑
60
°
,在向物料存储箱2中补充饲料的时候能够对饲料起到导向作用,使饲料全部落入第一物料传送平台3上,避免饲料浪费。
35.请参阅图2,物料存储箱2内部且靠近出料口的一侧设置有拨轮轴6,拨轮轴6的一端贯穿至物料存储箱2的外侧并设置有连接部件7,连接部件7为齿轮传动组件,齿轮传动组件通过第一物料传送平台3驱动,使拨轮轴6转动的时候能够辅助饲料的输送。
36.请参阅图3,物料存储箱2底部设置有供电模块9,使该装置使用过程低碳环保,不会对牧场造成污染,不影响动物的健康,解决了传统发电机造影大、污染大的问题。
37.需要说明的是,上述描述供电模块9指代的是为该装置提供动能的装置,目前供电的方式有很多种,实际使用时,可根据需求进行选择,例如使用可直接充电的锂电池电瓶、太阳能电池组件等。
38.请参阅图1,物料存储箱2外侧对应第二物料传送平台4上方的位置处设置有防护罩5,能够遮风避雨,避免物料被雨水或大风影响。
39.第一物料传送平台3包括第一传送带、第一电机301和第一传动辊筒组件,第一传送带设置在第一传动辊筒组件上,第一电机301驱动第一传动辊筒组件转动。
40.第二物料传送平台4包括第二传送带、第二电机401和第二传动辊筒组件,第二传送带设置在第二传动辊筒组件上,第二电机401驱动第二传动辊筒组件转动,其中第二传动滚筒组件上安装有传动齿轮,与拨轮轴6上的齿轮传动组件之间通过链条传动连接,能够带动拨轮轴6一起转动。
41.在使用本实用新型的时候:首先将牵引车头1的自动驾驶系统进行调试并试验,使其能够按照规定路线进行行驶一个周期,然后将已经组装的撒料车和牵引车头1之间通过拖挂装置8连接起来,并停放在规定的停车区域。
42.接着中央控制系统开始向该装置发送接料的命令,开始扫描环境信息建立地图,确定安全后向混料区行驶,完成接料并行驶至布料区域。
43.当该装置行驶到达布料区域指定布料地点时,第一电机301启动,将物料从第一物
料传送平台3输送至第二物料传送平台4上,之后第二电机401启动,将第二物料传送平台4上的物料抛洒至外界供动物使用,此时物料存储箱2中饲料的重量不断减小,当称重传感器10检测到饲料重量到达一定值时,关闭第一电机301和第二电机401,布完所需重量的草料,之后中央控制系统发出指令,使该装置驶出布料区域并在规定安全区域进行停放。
44.以上所述仅为本实用新型的实施方式而已,并不用于限制本实用新型。对于本领域技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原理以内所作的任何修改、等同替换、改进等,均应包括在本实用新型的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。