1.本发明涉及一种机器人驱动器,具体地说涉及一种采用在离子液体聚合物凝胶层上下两侧分别粘有活性炭层和金箔层,共有5层结构组成的一种软体机器人驱动器。
背景技术:
2.普通的机器人驱动器由马达来作为动力驱动,这种驱动器在软体机器人上无法运作。传统的柔性机构是利用柔性材料的弹性变形来传递或转换运动、力或能量的一类机构,但在工作过程中需要机械外力提供驱动源,才能改变柔性机构的运动状态。由于机械外力提供驱动源的机械结构复杂,因此组成的驱动器成本很高,不能普及。另外由于软体机器人能够产生大变形的能力对材料和驱动器提出了非常高的要求,导致传统的材料和驱动器已不能满足其性能需求,目前虽然有结构和驱动一体化的新型软体智能材料,如sma、ipmc及气动人工肌肉等,但是以上这些材料均具有一定的性能缺陷,且商业化生产水平较低,难以满足软体机器人发展及应用的需求。
技术实现要素:
3.本发明的目的是克服现有技术的不足之处,提供一种采用在离子液体聚合物凝胶层上下两侧分别粘有活性炭层和金箔层,共有5层结构组成的一种软体机器人驱动器。
4.本发明解决其技术问题所采用的技术方案是:一种软体机器人驱动器,包括凝胶,凝胶上面置有上活性炭,上活性炭上面覆盖有上金箔,上金箔顶端置有上铜片,凝胶下面置有下活性炭,下活性炭下面覆盖有下金箔,下金箔顶端置有下铜片,上铜片电连接上导线一端,上导线另一端电连接电池正极端,电池负极端电连接下导线一端,下导线另一端电连接下铜片。
5.本发明的有益效果是,软体机器人驱动器同时具备驱动功能和结构功能的双重功能。软体机器人驱动器单元构成了大部分甚至全部的软体机器人结构。软体机器人驱动器是软体机器人的基本组成单元,其材料特性、位置、形状尺寸和动力学特性决定了软体机器人的结构及性能。本发明的软体机器人驱动器是一种特殊类型的柔性机构,软体机器人驱动器的结构本身就具备主动变形能力,软体机器人系统设计本质上是以软体机器人驱动器为基本模块,将材料和结构相结合以及结构和控制相结合的一体化综合设计,因此本发明的软体机器人驱动器能为软体机器人系统提供基本的动力,并且结构简单,能实现软体机器人的各项特殊功能。
附图说明
6.下面结合附图和实施例对本发明进一步说明。
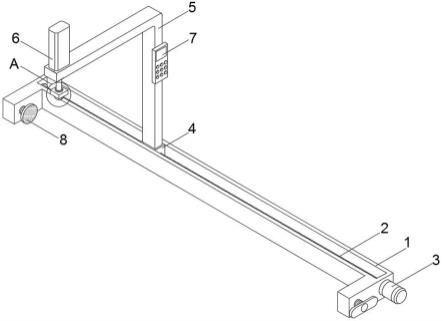
7.图1是本发明的实施例一的结构图。
8.图中:1.上金箔,2.凝胶,3.上活性炭,4.上铜片,5.下铜片,6.下金箔,7.下活性炭,8.下导线,9.上导线,10.电池。
具体实施方式
9.在图1所示实施例中,设置有上金箔(1),凝胶(2),上活性炭(3),上铜片(4),下铜片(5),下金箔(6),下活性炭(7),下导线(8),上导线(9),电池(10)。
10.实施本发明的一种软体机器人驱动器,包括凝胶(2),凝胶(2)上面置有上活性炭(3),上活性炭(3)上面覆盖有上金箔(1),上金箔(1)顶端置有上铜片(4),凝胶(2)下面置有下活性炭(7),下活性炭(7)下面覆盖有下金箔(6),下金箔(6)顶端置有下铜片(5)。
11.实施本发明的一种软体机器人驱动器,上铜片(4)电连接上导线(9)一端,上导线(9)另一端电连接电池(10)正极端,电池(10)负极端电连接下导线(8)一端,下导线(8)另一端电连接下铜片(5)。
12.实施本发明的一种软体机器人驱动器,凝胶(2)由聚合物和离子液体组成,聚合物为ilg混合溶液,ilg混合溶液由1-丁基-3-甲基咪唑四氟硼酸盐、甲基丙烯酸羟乙酯、二乙氧基苯乙酮和tio四种原料组成,在紫外线灯的照射下,以上四种原料发生聚合反应形成凝胶状态的聚合物,离子液体为室温熔融盐,室温熔融盐是一种由正负离子组成的在室温下呈液态的化合物,室温熔融盐的阴阳离子数目应相同,离子液体整体上显电中性,离子液体应具有导电性,离子液体应具有溶解功能和吸收功能和催化作用,离子液体应具有稳定性和无挥发性。
13.实施本发明的一种软体机器人驱动器,上金箔(1)、凝胶(2)、上活性炭(3)、上铜片(4)、下铜片(5)、下金箔(6)、下活性炭(7)的制作过程为,凝胶中含有的离子液体应具有粘度,活性炭可以直接贴在凝胶外侧的表面进行固定,放置在压力设置为1n的压片机下压5min,再将其放入温度为60℃烘箱内热烘10min,最后将金箔均匀地粘贴在活性炭的表面,制作成软体机器人驱动器。
14.实施本发明的一种软体机器人驱动器,软体机器人驱动器同时具备驱动功能和结构功能的双重功能。软体机器人驱动器单元构成了大部分甚至全部的软体机器人结构。软体机器人驱动器是软体机器人的基本组成单元,其材料特性、位置、形状尺寸和动力学特性决定了软体机器人的结构及性能。本发明的软体机器人驱动器是一种特殊类型的柔性机构,软体机器人驱动器的结构本身就具备主动变形能力,软体机器人系统设计本质上是以软体机器人驱动器为基本模块,将材料和结构相结合以及结构和控制相结合的一体化综合设计,因此本发明的软体机器人驱动器能为软体机器人系统提供基本的动力,并且结构简单,能实现软体机器人的各项特殊功能。
15.实施本发明的一种软体机器人驱动器,凝胶是一种新型的软体机器人驱动器柔性材料,主要含有聚合物和离子液体,聚合物混合溶液由4种原料组成,分别为1-丁基-3-甲基咪唑四氟硼酸盐,甲基丙烯酸羟乙酯,二乙氧基苯乙酮和tio;在紫外线灯的照射下,它们发生聚合反应形成凝胶状态的聚合物。离子液体又称室温熔融盐,是一种完全由正负离子组成的在室温下呈液态的化合物,由于其阴阳离子数目相同,因此离子整体上显电中性。离子液体具有极高的导电性、极低的挥发性、较宽的电化学窗口、良好的稳定性、独特的溶解、吸收性能和催化作用,因此在电化学、液-液分离、气体吸收、催化反应等领域受到高度重视,部分种类的离子液体已经实现了工业化生产和应用。将离子液体负载到有机高分子材料(如聚丙烯、聚偏氟乙烯、聚甲基丙烯酸酯等)或无机多孔材料(如硅胶、碳纤维、氧化铝等)上,制成的固载化离子液体同时具有离子液体和载体材料的双重性质。负载化离子液体已
经在催化反应、化学分离、聚电解质等方面得到了广泛应用。
16.电解质是离子型软体驱动器的重要组成部分,而离子液体由于具有不易挥发、离子导电性高、电化学窗口宽等优点,是理想的电解质材料。以离子液体替代传统的电解质溶液,利用离子液体负载化方法制得的离子液体聚合物凝胶是一种新型的离子型软体驱动器。将其作为制作新型驱动器的核心材料,是目前国内外软体驱动器领域的新兴研究方向。用于制作离子型软体驱动器的离子液体聚合物凝胶,需要具有较高的离子电导率、良好的电化学稳定性以及较高的机械强度。因而需要选取具有特定性质的离子液体、聚合物载体,和特定适用的负载化方法。
17.实施本发明的一种软体机器人驱动器,软体机器人能够产生大变形的能力对材料和驱动器提出了非常高的要求,导致传统的材料和驱动器已不能满足其性能需求,需采用具有结构和驱动一体化的新型软体智能材料,如sma、ipmc及气动人工肌肉等。但是目前这些材料均具有一定的性能缺陷,且商业化生产水平较低,难以满足软体机器人发展及应用的需求。因此,需要将材料科学与工程相结合,以软体机器人的功能需求、使用环境、成型工艺等为准则研制高质量的新型电活性材料。
18.作为典型的软凝聚态物质,凝胶由多孔高分子链和大量小分子聚合而成,在宏观上具有一般固体的自束缚特征,在微观上具有一般流体的自由流动特征,因此可以表现出许多与传统材料完全不同的复杂特性与机械性能。凝胶内部包含可自由流动的离子液体,是一种新型高性能离子型驱动器,具有变形大、响应迅速、功耗低、质量轻和稳定性高等许多优异特征。材料可以采用热压、光固化等方法加工,其独特的响应性质使其在软体机器人领域具有十分广阔的应用前景。
19.软体机器人驱动器由5层结构组成,与传统的电活性聚合物驱动器的结构相似,均为对称结构。中间层是由电活性聚合物材料组成的,用于存储离子液体。两侧由活性炭组成的软体驱动器电极层,覆盖在中间层的外面,分别用于存储阴阳离子。由于活性炭具有表面积高、导电率高、密度高和吸附力强等特征,非常适合用于制作软体驱动器的电极材料。金箔被选择作为电流集流体,粘贴在活性炭层的外表面。当驱动器工作时,导线一端连接到软体驱动器贴合金属外部,导线从外部电极引出,另一端连接到驱动电源。软体驱动器导线引出端用夹具轻微夹紧以使电极具有良好导通性,可以采用悬臂梁的方式固定或者垂直的方式固定。
20.实施本发明的一种软体机器人驱动器,软体机器人驱动器的制造过程是,先分别裁剪相同面积大小的离子液体聚合物凝胶层、活性炭层、金箔层,实施例一的尺寸为长30毫米、宽5毫米,可以作为样品,由于离子液体具有一定的粘度,因此活性炭电极可以直接贴在凝胶外侧的表面而固定,然后在压力设置为1n的压片机下压5min,再将驱动器放入温度为60℃烘箱内热烘10min,最后,将金箔均匀地粘贴在活性炭层的表面上,即可以得到软体机器人驱动器。
21.实施本发明,效果很好。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。