1.本发明涉及食品加工和食品包装技术,更具体地,涉及一种用于处理从食品处理线接收的输入数据以确定用于采样的触发数据的系统及其方法。
背景技术:
2.如今,食品处理线,如食品加工线和食品包装线,由复杂系统控制,其中来自不同制造商的硬件设备将无缝协作。除了制造商方面的灵活性外,系统的构建方式也确保在需要时可以进行升级或调整。
3.如今,提供灵活性、适应性和可靠性的常见方法是使用模块、纯软件模块或硬件和软件组合模块。通过这种方法,就可以以一种方便的方式建立新的系统。此外,由于不同的模块可以独立测试,因此可以降低出错的风险。
4.设置系统时的一个具体挑战是采样,即如何从食品处理线中提供的传感器等设备接收输入数据。如果硬件设备来自不同的制造商,那么对于操作员来说,更改或适应可能会很麻烦且耗时。
5.采样数据通常用于触发不同的动作,这意味着如果采样不充分,则因此采样后的动作也将不充分。例如,如果采样数据与生产的多个包装有关,不正确的采样数据可能导致确定出不正确的生产包装数量,进而可能导致质量控制检查没有按照约定的间隔进行。因此,重要的是充分采样,并尽可能减少出错风险。
6.因此,由于目前对系统的全面了解往往不足以确保对采样进行了充分的更改,因此,现在存在更改采样会导致不期望的影响的风险,这可能会危及系统的整体性能。
7.如上所述,尽管在一般水平上已知用于建立食品处理线控制系统的基于模块的方法,但到目前为止,与采样相关的具体挑战尚未具体解决。
技术实现要素:
8.本发明的目的是至少部分克服现有技术的上述一个或多个限制。特别是,本发明的目标是提供一种系统和方法,用于处理从食品处理设备中提供的设备接收的输入数据,使得能够以可靠的方式确定基于输入数据确定的触发数据。
9.已经认识到,通过组合两个或多个所谓的触发块(trigger block),可以建立系统和方法,使得可以基于输入数据可靠地确定触发数据。由于两个或多个触发块可以以各种方式组合,因此提供了灵活性。同时,由于通过以不同方式组合触发块来提供灵活性,触发块可以以直接的方式单独设计,即触发块可以单独具有低复杂性,即与不基于触发块的模块处理采样相比,复杂性更低。这种低复杂性使得触发块能够可靠且容易地适应与不同设备工作。
10.根据第一方面,提供了一种系统,用于处理从食品处理线接收的输入数据,以确定用于采样的触发数据。该系统可包括收发器、处理器和存储器。收发器可以配置为接收输入
数据并发送触发数据。处理器可以配置为执行配置为接收第一输入参数数据和发送第一输出参数数据的第一触发块功能、配置为接收第二输入参数数据并发送第二输出参数数据的第二触发块功能,其中输入数据可以包括第一输入参数数据和第二输入参数数据,触发数据可以包括第一输出参数数据和第二输出参数数据。
11.具有第一和第二触发块功能并结合这些功能的输出的优点是,可以使用低复杂性构建块(即,由第一和第二触发块功能实现的触发块)以各种方式创建触发数据。拥有这些低复杂性构建块,可以轻松地针对各种不同的底层系统和接口进行调整并保持更新。
12.第二输入参数数据可以至少包括第一输出参数数据的一部分。
13.第一触发块功能向第二触发块功能提供数据,这为触发采样打开了新的途径。
14.第一和第二块功能可以有一个状态机,包括关闭(off)、启动(starting)、激活(active)、完成(complete)和等待(wait)。
15.处理器还可以被配置为执行第三触发块功能,该功能被配置为接收第三输入参数数据并发送第三输出参数数据。输入数据可以包括第一输入参数数据、第二输入参数数据和第三输入参数数据,并且触发数据可以包括第一输出参数数据、第二输出参数数据以及第三输出参数数据。
16.具有第三触发块功能的一个优点是可以触发更广泛多样的采样。
17.第一和第二输入参数数据可以包括:
18.启用(enable),布尔运算符,如果设置为真(true),则将状态从关闭(off)切换到启动(starting),
19.中止(abort),布尔运算符,如果设置为真(true),则将状态切换为关闭(off),
20.强制完成(force complete),布尔运算符,如果设置为真(true),则将从激活(active)切换到完成(complete),
21.结束(done),布尔运算符,如果设置为真(true),则将状态从完成(complete)切换为等待(wait),
22.延迟时间(delay time),整数,其设置从启动(starting)到激活(active)的延迟,
23.活动时间(active time),整数,其设置从激活(active)到完成(complete)的延迟,以及
24.等待时间(wait time),整数,其设置从完成(complete)到关闭(off)的延迟。
25.触发数据可以传输到设备,例如传感器。
26.该设备可以配置为测量机械振动。
27.触发数据可以配置为向操作员呈现通知。
28.食品处理线可包括食品加工线和/或食品包装线。
29.根据第二方面,提供了一种用于处理从食品处理线接收到的输入数据以确定用于采样的触发数据的方法。该方法可以包括接收输入数据,其中输入数据包括第一输入参数数据和第二输入参数数据,将第一输入参数信息馈送至第一触发块功能,执行第一触发块功能以生成第一输出参数信息,将第二输入参数信息馈送至第二触发块功能,执行第二触发块功能以生成第二输出参数数据,并将第一输出参数数据和第二输出数据组合到触发数据中。
30.参考第一方面,相同的优点和特征也适用于此第二方面。
31.第二输入参数数据可以至少包括第一输出参数数据的一部分。
32.第一和第二输入参数数据可以包括:
33.启用(enable),布尔运算符,如果设置为真(true),则将状态从关闭(off)切换到启动(starting),
34.中止(abort),布尔运算符,如果设置为真(true),则将状态切换为关闭(off),
35.强制完成(force complete),布尔运算符,如果设置为真(true),则将从激活(active)切换到完成(complete),
36.结束(done),布尔运算符,如果设置为真(true),则将状态从完成(complete)切换为等待(wait),
37.延迟时间(delay time),整数,其设置从启动(starting)到激活(active)的延迟,
38.活动时间(active time),整数,其设置从激活(active)到完成(complete)的延迟,以及
39.等待时间(wait time),整数,其设置从完成(complete)到关闭(off)的延迟。
40.触发数据可以传输到设备,例如传感器。
41.触发数据可以配置为向操作员呈现通知。
42.根据第三方面提供了一种计算机程序,其包括用于实现根据第二方面的方法的指令,其中所述计算机程序存储在计算机可读介质中。
43.参考第一方面或第二方面的优点和特征也适用于此第三方面。
44.本发明的其他目的、特征、方面和优点将从以下详细描述以及附图中显现。
附图说明
45.现在将参考附图通过示例的方式描述本发明的实施方案,其中
46.图1示意性地显示了如何在食品处理线中使用模块化数据记录器的示例。
47.图2显示了触发块。
48.图3是显示输入参数数据示例的表格。
49.图4显示了状态机。
50.图5a-c显示了触发块如何用于生成触发数据的第一种情况。
51.图6a-b显示了第二种情况。
52.图7a-b显示了第三种情况。
53.图8a-b显示了第四种情况。
54.图9示意性地显示了用于在食品处理线中处理采样的系统。
55.图10是流程图,其显示了用于处理从食品处理线接收到的输入数据以确定用于采样的触发数据938的方法的步骤。
具体实施方式
56.图1以示例的方式从数据处理的角度一般地说明了食品处理线100,此处示例为食品包装线。
57.在该特定示例中,提供了中央模块102、第一填充机模块104、第二填充机模块106、线路控制器模块108、第一下游设备模块110、第二下游设备模块112和第三下游设备模块
114。如图所示,在该特定示例中,中央模块102可以通信地连接到第一填充机模块104、第二填充机模块106和第二下游设备模块112。这些模块之间的通信可以通过中央模块数据记录器(mdl)116实现,如图所示,中央模块数据记录器(mdl)116配置为与第一填充机mdl 118、第二填充机mdl 120和第二下游设备mdl 122通信。这些mdl116、mdl 118、mdl 120、mdl 122又可以包括触发块,如以下所说明的。
58.mdl 116、mdl 118、mdl 120、mdl 122可以通信连接到实时系统。更具体地,中央mdl 116可连接至中央实时系统124,第一填充机mdl 118可连接到第一填充机实时系统126,第二填充机mdl 120可以连接到第二填充机实时系统128,并且第二下游设备mdl 122可以连接到第二下游设备实时系统130。
59.如图所示,在此分布式系统中,并非所有模块都必须包含mdl。例如,根据第二种方式,线路控制器模块108可以配备不同类型的元件,这里是线路控制器核心元件132,与mdl不同,它不包括触发块。选择这种不同类型的元件可能有不同的原因。例如,对于线路控制器模块108,可以发现选择不同的配置以确保可以根据预设要求对食品处理线100进行控制是有益的。与mdl类似,线路控制器核心元件132可以通信地连接到线路控制器实时系统134。
60.第一下游设备模块110和第三下游设备模块114可以第三种方式与中央模块102通信连接。以这种第三种方式,中央模块mdl 116可以分别与第一下游设备实时系统136和第三下游设备实时系统138直接通信连接。以这种方式在中央模块mdl 116和实时系统之间进行直接通信可能有不同的原因。一个原因可能是不需要处理来自食品处理线100这部分的输入数据。另一个原因是第一下游设备实时系统136和第三下游设备实时系统138与食品处理线100中其他模块中使用的实时系统不同,并且发现第一下游设备模块110和第三下游设备模块114的实时系统不适合或不利于与mdl组合。
61.可提供远程服务单元(rsu)140和分析工具142,使得食品生产商和/或食品处理线供应商能够呈现和/或分析从食品处理线100不同部分捕获的输入数据。
62.如图所示,第一填充机模块104和第二填充机模块106可连接至填充机144,线路控制器模块108可连接至线路控制器146,第一下游设备模块110可连接至蓄能器(accumulator),第二下游设备模块112可连接至压盖机(capper)150,并且第三下游设备模块114可以连接到纸板包装器152。
63.如上所述,mdl可以包含两个或多个触发块。触发块的示例如图2和图3所示。如图所示,可以提供输入参数和输出参数。
64.在图2和图3所示的示例中,输入参数可以是以下各项中的一个或多个:
65.启用时间(enable time),布尔运算符,其是可选的,但如果存在,并且存在从“false”到“true”的转换,则可以锁定“enable”表达式。
66.启用(enable),布尔运算符,如果设置为真(true),则将状态从关闭(off)切换到启动(starting),
67.中止(abort),布尔运算符,如果设置为真(true),则将状态切换为关闭(off),
68.强制完成(force complete),布尔运算符,如果设置为真(true),则将从激活(active)切换到完成(complete),
69.结束(done),布尔运算符,如果设置为真(true),则将状态从完成(complete)切换
为等待(wait),
70.延迟时间(delay time),整数,其设置从启动(starting)到激活(active)的延迟,
71.活动时间(active time),整数,其设置从激活(active)到完成(complete)的延迟,以及
72.等待时间(wait time),整数,其设置从完成(complete)到关闭(off)的延迟。
73.图4举例说明了上述状态以及这些状态如何相互关联。尽管图4所示的状态机有利于使用,但不同的环境可能有不同的要求,因此在其他环境中,不同的状态机可能更有益。然而,组合触发块的概念并不局限于图4所示的状态机,该概念可用于广泛的状态机。此外,如图所示,可以通过使用布尔参数来省略状态。换言之,一些状态可以被视为是可选的。
74.为了进一步说明使用触发块组合的优点,如图2所示,通过示例给出了三种情况。在第一种情况下,如图5a和5b所示,设置如下要求:
[0075]-按20秒采样的序列获取3次振动,
[0076]-每次振动之间等待10秒钟,
[0077]-连续生产2分钟后获取,
[0078]-如果生产中断,则重新启动序列,并且
[0079]-每天重复该序列3次(8小时)。
[0080]
如上所述,在第一种情况下,应捕获振动数据。振动数据,即代表食品处理线中发生的机械振动的数据,可以有利地用于例如预防性维护。
[0081]
图5a举例说明了如何通过显示生产信号“plc1/prod”和振动数据捕获信号“vib”来捕获振动数据。生产信号“plc1/prod”在生产进行时为1,在生产停止时为0。振动数据捕获信号“vib”在捕获振动数据时为1,在未捕获振动数据的情况下为0。
[0082]
如图5a所示,当生产中断时,需要重新启动序列。为了便于说明,仅对每天三次中的第一次进行了说明。
[0083]
为了满足上述要求,可以组合三个触发块,如图5b所示。如上所述,输入参数“enable time”是可选的,通过设置为“null”而省略。图5c详细说明了三个触发块如何相互作用以满足上述要求。
[0084]
图6a和6b示出了第二种情况,其中要求是:
[0085]-按20秒采样的序列获取3次振动,
[0086]-每次振动之间等待10秒,
[0087]-连续生产2分钟后获取,
[0088]-如果生产中断,则继续该序列,并且
[0089]-每天重复该序列3次(8小时)。
[0090]
因此,与图5a-5c所示的第一种情况不同,在第二种情况下,如果生产中断,即“plc1/prod”从1变为0,则应继续执行序列,即振动数据的捕获,而不是重新启动。
[0091]
通过使用相同的触发块,但配置不同,可以满足要求。如图6b所示,与第一种情况相比,第二种情况下的输入参数“enable”、“done”、“delay time”和“wait time”的配置有所不同。
[0092]
如图所示,在本例中,触发块2和3的“等待时间”设置为999秒。这样做的原因是将状态机设置为保持(hold)状态,或者以不同的方式设置为冻结(frozen)状态。在这个特定
的示例中,任何大于30秒(10秒“延迟时间”和20秒“触发时间”之和)的数字都可以实现这一点。
[0093]
触发块1的“等待时间”设置为28 800秒,相当于8小时(8*60*60秒)。
[0094]
在第三种情况下,如图7a和7b所示,要求如下:
[0095]-平行于20秒采样获取2次振动,并且平行于30秒采样获取1次振动,
[0096]-连续生产2分钟后获取,
[0097]-如果生产中断,则重新启动序列,
[0098]-仅当所有采样完成时,才认为捕获正确完成,并且
[0099]-每天重复该序列3次(8小时)。
[0100]
如图所示,通过使用四个触发块可以满足这些要求。第一和第三触发块是相同的,因此仅描述一次。第二触发块用于30秒采样。第四个触发块用于处理逻辑,即在进行所有三个采样时关闭捕获(考虑已完成)。
[0101]
在第四种情况下,如图8a和8b所示,要求如下:
[0102]-按20秒采样序列获取3次振动,
[0103]-每次振动之间等待10秒,
[0104]-连续生产2分钟后获取,符号名称“plc1/prod”和符号“plcl/discharge”不得激活,
[0105]-如果生产中断或“plc1/discharge”变为激活状态,则继续该序列,以及
[0106]-每天重复该序列3次(8小时)。
[0107]
如图8b所示,三个触发块可用于满足这些要求。根据要求设置启用输入参数,使得plc1/prod应激活,且plc1/discharge不应激活。
[0108]
例如,如图5a-c、图6a-b、图7a-b和图8a-b所示,触发块可以以不同的方式组合,以满足关于如何进行采样的各种不同要求。触发块是一个相对简单的构建块,因此可以根据不同的接口和编程语言而容易地进行调整。
[0109]
即使没有说明,触发信号也可用于通知操作员要执行某项任务,例如,捕获包装样本并执行多个预先确定的测试。
[0110]
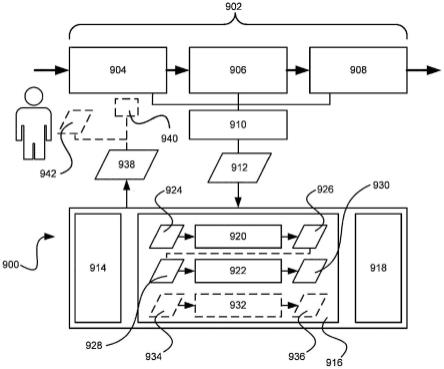
图9示意性地显示了食品处理线902中用于处理采样的系统900。如示例所示,食品处理线902可以包括三个单元,例如填充机904、蓄能器906和下游设备908,例如纸板包装机。食品处理线902可以通信连接到线路控制器910,从而可以捕获来自食品处理线902的数据。捕获的数据的至少一部分可以作为输入数据912传输到系统900。
[0111]
输入数据912可以由收发器914接收。系统900还可以包括处理器916和存储器918。处理器916可以包括第一触发块功能920和第二触发块功能922,即,例如是图2中所示的触发块的实现方案。第一触发块功能920可以配置为接收可构成输入数据912的一部分的第一输入参数数据924,并输出第一输出参数数据926。类似地,第二触发块功能1922可以配置为接受可构成输入数据912的一部分的第二输入参数数据928,并输出第二输出参数数据930。如上所示,在某些情况下,第二输入参数数据928可以包括第一输出参数数据926。此外,可以使用第三触发块功能932。这可以配置为接收可构成输入数据912的一部分的第三输入参数数据934,并输出第三输出参数数据936。
[0112]
第一和第二输出参数数据926、930可以组合成触发数据938,触发数据可以传输到
设备940,使得能够捕获振动数据,如以上所说明的。在使用第三触发块功能932的情况下,第三输出参数数据936也可以构成触发数据938的一部分。此外,或替代地,也可以使用触发数据938向操作员呈现通知942。例如,通知942可以例如包含一条指令,以用于捕获包装样本并执行一系列测试。
[0113]
图10是说明方法1000的步骤的流程图,方法1000用于处理从食品处理线902接收的输入数据912,以确定用于采样的触发数据938。该方法可以包括用于接收输入数据912的第一步骤1002,其中输入数据912可以包括第一输入参数数据924和第二输入参数数据928。第二步骤1004用于将第一输入参数信息924馈送至第一触发块功能(920)。第三步骤1006用于执行第一触发块功能920,从而生成第一输出参数数据926。第四步骤用于将第二输入参数数据928馈送(1008)至第二触发块功能922。第五步骤用于执行(1010)第二触发块功能922,从而生成第二输出参数数据930。第六步骤1012用于将第一输出参数数据926和第二输出参数数据930组合(1012)到触发数据938中。即使按特定顺序描述,也同样可以并行执行其他顺序或某些步骤。
[0114]
从上面的描述可以看出,尽管已经描述和示出了本发明的各种实施方案,但本发明不限于此,还可以在以下权利要求中定义的主题范围内以其他方式实施。
[0115]
因此,如前所述的一个或多个实施方案可能涉及食品处理线或工厂,例如用于巴氏杀菌或均质化的食品加工线或工厂,和/或用于将可倾倒食品填充到复合包装中的食品包装线或工厂,其中,填充工厂配置为从多层复合包装材料形成复合包装,并用可倾倒食品填充复合包装。食品处理工厂包括系统900,用于处理从食品处理线902接收的输入数据912,以确定用于调整食品处理线902中包含的一个或多个设备(例如设备940)的操作的触发数据938。输入数据可以包括一个或多个预定值和/或从食品处理线中包含的一个或多个设备(例如传感器)接收的数据。
[0116]
食品处理线902可以包括控制设备,该控制设备被配置为根据触发数据控制一个或多个设备940的操作。例如,控制设备可以配置为根据触发数据驱动一个或多个传感器和/或驱动设备,和/或在用户界面上向用户显示警报。例如,传感器可配置为测量机械振动,并且传感器的采样可由触发数据938启动。
[0117]
该系统包括收发器(914)、处理器(916)和存储器(918),其中收发器(914)配置为接收输入数据(912),例如指示食品处理线中的一个或多个设备的操作,并发送触发数据(938),例如用于调整食品处理线中的一个或多个设备的操作的命令。
[0118]
处理器配置为执行:
[0119]-第一触发块功能(920),其配置为接收第一输入参数数据(924)和发送第一输出参数数据(926),
[0120]-第二触发块功能(922),其配置为接收第二输入参数数据(928)和发送第二输出参数数据(930),并且
[0121]
其中,输入数据(912)包括第一输入参数数据(924)和第二输入参数数据(928),并且触发数据(940)包括第一输出参数数据(926)和第二输出参数数据(930)。
[0122]
第二输入参数数据928可以至少包括第一输出参数数据926的一部分。这样,触发块功能可以级联(cascaded)。
[0123]
(第一、第二和/或第三)触发块功能920、922、932可以包括,即实现,一个或多个包
含多个状态的有限状态机。状态之间的转换是输入数据的函数,例如仅作为输入数据的函数。可选地,触发器数据是状态之间转换和/或有限状态机的当前状态的结果。
[0124]
(第一、第二和第三)触发块功能的操作是可以根据输入数据(例如仅根据输入数据)而修改的。有利的是,这使得触发块功能能够容易地适应不同的应用,而无需修改触发块功能的构建块和所实现的有限状态机。
[0125]
在一个或多个实施方案中,食品处理线的处理器916进一步配置为执行:
[0126]
第三触发块功能932,其配置为接收第三输入参数数据934并发送第三输出参数数据936,并且
[0127]
其中,输入数据912包括第一输入参数数据924、第二输入参数数据92和第三输入参数数据934,触发数据938包括第一输出参数数据926、第二输出参数数据930和第三输出参数数据936。
[0128]
第三触发块功能可以包括,即实现,包括前面参考第一和第二触发块功能讨论的多个状态的有限状态机。
[0129]
第一、第二和第三输入参数数据924、928、934包括:
[0130]
启用(enable),布尔运算符,如果设置为真(true),则将状态从关闭(off)切换到启动(starting),
[0131]
中止(abort),布尔运算符,如果设置为真(true),则将状态切换为关闭(off),
[0132]
强制完成(force complete),布尔运算符,如果设置为真(true),则将从激活(active)切换到完成(complete),
[0133]
结束(done),布尔运算符,如果设置为真(true),则将状态从完成(complete)切换为等待(wait),
[0134]
延迟时间(delay time),整数,其设置从启动(starting)到激活(active)的延迟,
[0135]
活动时间(active time),整数,其设置从激活(active)到完成(complete)的延迟,以及
[0136]
等待时间(wait time),整数,其设置从完成(complete)到关闭(off)的延迟。
[0137]
在一个或多个实施方案中,第一和第二输入参数数据924、928至少包含第三输出参数数据936的一部分。第三输出数据936可以强制第一和第二触发块功能920、922处于完成(complete)状态,完成(complete)状态表示有限状态机的操作循环的结束。
[0138]
一个或多个设备940可以包括传感器940,其中触发数据938启动传感器940的采样。传感器940可以配置为测量机械振动。一个或多个设备可以包括配置为显示通知942的用户界面,其中触发数据938包括通知942。
[0139]
一个或多个实施方案可涉及一种方法1000,该方法用于根据先前公开的一个或多个实施方案处理从食品处理线902接收的输入数据912,以确定用于调整食品处理线902的一个或多个设备940的操作的触发数据938。该方法包括:
[0140]
接收1002输入数据912,其中输入数据912包括第一输入参数数据924和第二输入参数数据928,
[0141]
将第一输入参数数据924馈送1004至第一触发块功能920,
[0142]
执行1006第一触发块功能920,以生成第一输出参数数据926,
[0143]
将第二输入参数数据928馈送1008至第二触发块功能922,
[0144]
执行1010第二触发块功能922,以生成第二输出参数数据930,并且
[0145]
将第一输出参数数据926和第二输出参数数据930组合1012到触发数据938中。
[0146]
第一和第二输入参数数据(924,928)可以包括:
[0147]
启用(enable),布尔运算符,如果设置为真(true),则将状态从关闭(off)切换到启动(starting),
[0148]
中止(abort),布尔运算符,如果设置为真(true),则将状态切换为关闭(off),
[0149]
强制完成(force complete),布尔运算符,如果设置为真(true),则将从激活(active)切换到完成(complete),
[0150]
结束(done),布尔运算符,如果设置为真(true),则将状态从完成(complete)切换为等待(wait),
[0151]
延迟时间(delay time),整数,其设置从启动(starting)到激活(active)的延迟,
[0152]
活动时间(active time),整数,其设置从激活(active)到完成(complete)的延迟,以及
[0153]
等待时间(wait time),整数,其设置从完成(complete)到关闭(off)的延迟。
[0154]
该方法还可以包括执行配置为接收第三输入参数数据(934)和发送第三输出参数数据(936)的第三触发块功能932,以及
[0155]
其中,输入数据(912)包括第一输入参数数据(924)、第二输入参数数据(928)和第三输入参数数据(934),并且触发数据(938)包括第一输出参数数据(926)、第二输出参数数据(930)和第三输出参数数据(936)。
[0156]
第一、第二和/或第三触发块功能920、922、932可以包括(例如实现)有限状态机,该有限状态机包括多个状态,优选地包括状态关闭(off)、启动(starting)、激活(active)、完成(complete)和等待(wait),其中该方法包括:
[0157]-根据输入数据912,例如仅根据输入数据912,在有限状态机的状态之间进行转换,和/或
[0158]-作为状态之间的转换和/或有限状态机的当前状态的结果而生成触发数据。
[0159]
第一和第二输入参数数据924、928至少包括第三输出参数数据936的一部分。
[0160]
该方法还可以包括根据第三输出参数数据强制第一和第二触发块功能920、922处于完成(complete)状态,该状态完成(complete)表示有限状态机的操作循环的结束。
[0161]
一个或多个实施方案还可涉及一种计算机程序产品,该计算机程序产品包括用于实现根据一个或更多实施方案的方法的指令,其中所述计算机程序存储在计算机可读介质上。
[0162]
换言之,一个或多个实施方案可以涉及计算机程序产品,计算机程序产品可加载到至少一个电子控制单元的存储器中,并且包括用于执行根据一个或更多实施方案的方法的步骤的软件代码部分。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。