亚临界火电机组协调系统pi控制器参数寻优方法
技术领域
1.本发明涉及一种基于改进粒子群算法的火电机组协调系统pi控制器参数寻优方法,属于热能动力工程和自动控制领域。
背景技术:
2.亚临界火电机组协调控制系统(ccs)通过将汽机和锅炉这一对快慢特性差异大的对象看作一个整体进行控制,以完成如下任务:(1)负荷指令不变时,能够消除扰动引起的主汽压力波动及负荷偏差;(2)负荷指令改变时,对外能够保证功率响应及时,对内能够控制主汽压力偏差在允许范围内,以平衡压力和功率之间的矛盾,从而维持机组安全稳定的运行。亚临界火电机组协调控制系统(ccs)可视为火电厂中枢,对机组安全稳定运行至关重要。
3.实际生产过程中,火电机组在大范围变负荷过程中,协调系统被控对象动态特性会发生明显变化,被控对象非线性尤为明显,若采用固定不变的控制器参数,会造成控制器参数与对象特性的严重失配,导致协调系统控制性能出现退化。目前火电机组灵活性改造正全面推进,为亚临界火电机组协调控制系统提出了更高要求,有必要针对当前亚临界火电机组协调控制系统存在的问题,做出针对性优化。
技术实现要素:
4.本发明的目的是提供一种亚临界火电机组协调系统pi控制器参数寻优方法,解决上述背景中提及的问题。
5.本发明的技术方案是,一种亚临界火电机组协调系统pi控制器参数寻优方法,其特征在于:锅炉主控pi控制器的传递函数表达式为:
[0006][0007]
汽机主控pi控制器的传递函数表达式为:
[0008][0009]
式中,k
p1
、t
i1
分别为锅炉主控pi控制器比例系数和积分时间;k
p2
、t
i2
分别为汽机主控pi控制器比例系数和积分时间;
[0010]
通过改进的粒子群算法确定汽机主控pi控制器的比例系数和积分时间、锅炉主控中pi控制器的比例系数和积分时间,来保证控制系统的稳定性,粒子群算法的适应度函数构建如下:
[0011][0012]
式中,式中和分别为机侧主汽压力偏差与负荷偏差,a1及a2为偏差对应的权重系数,pi控制器参数k
p1
、t
i1
、k
p2
、t
i2
的具体寻优步骤如下:初始化粒子群算法各参数,在每个周期计算当前pi控制器参数k
p1
、t
i1
、k
p2
、t
i2
对应的适应度函数j,进而判断是否满足
终止条件,若满足则停止迭代,得出全局最优解,最终得到pi控制器参数k
p1
、t
i1
、k
p2
、t
i2
的寻优值;若不满足,则各粒子位置和速度继续更新,直至满足终止条件。
[0013]
改进的粒子群算法为:单个粒子在d维空间搜寻最优解的过程中,搜寻初期应侧重本体历史信息,搜寻中后期应侧重粒子种群的历史信息、种群经验,因此表征个体认知的学习权重cm应先大后小,而表征社会经验的学习权重cn应先小后大,于是学习权重cm,cn采用如下形式:
[0014][0015]
其中,te为设定迭代次数。
[0016]
本发明具有以下有益效果:
[0017]
该方法在粒子群算法的基础上,改进个体粒子学习权重的取值方式,有效提高了寻优过程收敛速度、降低了寻优结果陷入局部最优点的概率。随后利用改进的粒子群算法寻优得到亚临界火电机组协调系统汽机主控和锅炉主控pi控制器的最优参数,优化控制系统性能。该方法能一定程度克服机组非线性和时变性给控制带来的不利影响,有效保证亚临界火电机组在快速大范围变负荷时的控制效果,提高机组运行的安全性与稳定性。
附图说明
[0018]
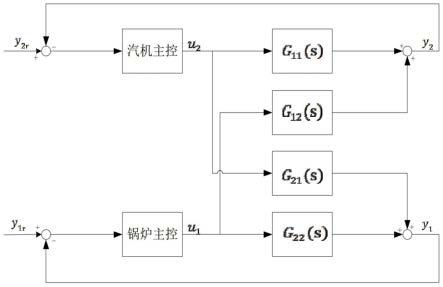
图1为亚临界火电机组协调控制系统结构示意图。
具体实施方式
[0019]
如图1所示,一种基于改进粒子群算法的火电机组协调系统pi控制器参数寻优方法具体实施方法如下:
[0020]
粒子群算法利用若干无质量的粒子,在搜索空间中独立搜寻最优解,所谓最优解即适应度函数最小值所对应的粒子位置,假设d维空间中存在由s个粒子组成的粒子种群,种群中第i个粒子的位置xi和速度vi如式(1)所示:
[0021][0022]
式中,x
ij
为第i个粒子在d维空间中位置的第j维分量;v
ij
为第i个粒子在d维空间中速度的第j维分量。
[0023]
第i个粒子位置和速度的更新机制如式(2)、式(3)所示:
[0024][0025][0026]
其中,和分别为t和t 1时刻第i个粒子的位置在d维空间的第j维分量;和为t和t-1时刻第i个粒子的速度在d维空间的第j维分量;为t-1时刻第i个粒子历史最优位置在d维空间的第j维分量;为t-1时刻粒子种群最优位置在d维空间的第j维分量;ω为惯性权重,表征粒子保持原来速度程度的系数;cm,cn表示学习权重,cm为粒子侧重
本体历史信息的权重系数,cn为粒子侧重粒子种群历史信息的权重系数,rm,rn为[0,1]范围内的随机数。
[0027]
单个粒子在d维空间搜寻最优解的过程中,搜寻初期应侧重本体历史信息,搜寻中后期应侧重粒子种群的历史信息、种群经验,因此表征个体认知的学习权重cm应先大后小,而表征社会经验的学习权重cn应先小后大,于是学习权重cm,cn采用如下形式:
[0028][0029]
其中,te为设定迭代次数。
[0030]
亚临界燃煤机组协调系统被控对象可被视为2
×
2多变量对象,对象的输入为u1、u2,分别表示燃烧量指令、汽机调门开度指令,系统的输出为y1、y2,分别表示机侧主汽压力、机组实发功率,输入输出关系可用下式描述:
[0031][0032]
式中g
11
(s)、g
21
(s)分别为以燃烧量指令u1为输入,y1、y2为输出的传递函数模型(汽机调门开度指令u2保持不变);g
12
(s)、g
22
(s)分别为以汽机调门开度指令u2为输入,y1、y2为输出的传递函数模型(燃烧量指令u1保持不变)。
[0033]
采用pi(比例积分)控制器作为亚临界燃煤机组协调系统汽机主控、锅炉主控的基本形式,控制策略如图1所示,图中y
1r
、y
2r
分别表示机侧主汽压力设定值、机组负荷指令。其中,锅炉主控pi控制器的传递函数表达式为:
[0034][0035]
汽机主控pi控制器的传递函数表达式为:
[0036][0037]
式中,k
p1
、t
i1
分别为锅炉主控pi控制器比例系数和积分时间;k
p2
、t
i2
分别为汽机主控pi控制器比例系数和积分时间。
[0038]
通过改进的粒子群算法确定汽机主控、锅炉主控中pi控制器的比例系数和积分时间,来保证控制系统的稳定性,粒子群算法的适应度函数构建如下:
[0039][0040]
式中,式中和分别为机侧主汽压力偏差与负荷偏差,a1及a2为偏差对应的权重系数。pi控制器参数k
p1
、t
i1
、k
p2
、t
i2
的具体寻优步骤如下:初始化粒子群算法各参数,在每个周期计算当前pi控制器参数k
p1
、t
i1
、k
p2
、t
i2
对应的适应度函数j,进而判断是否满足终止条件,若满足则停止迭代,得出全局最优解,最终得到pi控制器参数k
p1
、t
i1
、k
p2
、t
i2
的寻优值;若不满足,则各粒子位置和速度继续更新,直至满足终止条件。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
