技术特征:
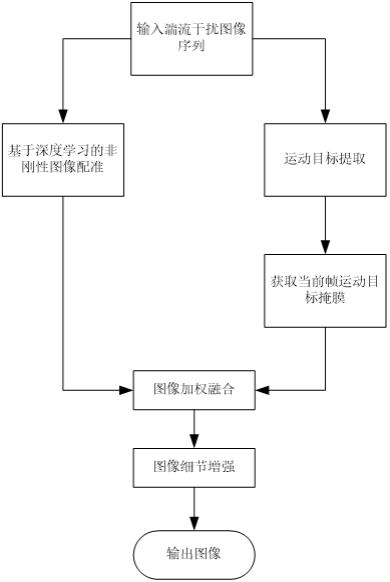
1.一种基于图像配准和动态目标融合的去湍流方法,其特征在于,包括以下步骤:步骤一:获取湍流干扰后的图像序列,搭建基于深度学习非刚性配准网络,对网络进行初始化后进行迭代优化获取去湍流形变图像;步骤二:提取当前图像的运动目标:采用vibe前景提取算法提取场景中的运动目标部分,形成运动目标掩膜;步骤三:对去湍流形变图像和原图图像运动区域进行局部区域融合,得到包含当前运动目标的去除了湍流的图;步骤四:采用基于分块导向滤波算法增强图像细节部分,得到清晰的去湍流图像。2.根据权利要求1所述的基于图像配准和动态目标融合的去湍流方法,其特征在于,所述深度学习非刚性配准网络由网格变形网络和图像生成网络组成。3.根据权利要求1所述的基于图像配准和动态目标融合的去湍流方法,其特征在于,对网络进行初始化,包括获取湍流干扰图像i
k
,初始化网络:根据下式初始化网络,让网络的输入和输出最相似:式中表示绝对偏差,为分别为网格变形网络和图像生成网络的权重变量,表示均匀网格图,表示第k个网格变形网络,表示图像生成网络;然后使用1000次最小化迭代后权重作为网络初始化权重。4.根据权利要求3所述的基于图像配准和动态目标融合的去湍流方法,其特征在于,使用傅里叶特征映射对网格输入进行预处理,以表示更高频的细节信息,高斯傅里叶特征映射如下:如下: 表示网格坐标,b是一组高斯分布随机采样点。5.根据权利要求4所述的基于图像配准和动态目标融合的去湍流方法,其特征在于,网络迭代优化,学习生成去湍流图像,包括:根据下式进行最小化迭代,直到网络收敛得到去除湍流的图像:式中,表示图像生成网络输出的湍流图像,,表示形变网格,表示去湍流图像和变形网格之间的约束;表示去湍流图像和变形网格之间的约束;表示对去湍流图像依据形变网格进行的形变操作。6.根据权利要求5所述的基于图像配准和动态目标融合的去湍流方法,其特征在于,将当前帧的运动目标掩模m和去湍流图x进行图像融合处理,得到保留运动物体的去除湍流的影响的融合图y,融合的具体步骤为:计算去湍流图和当前帧的运动物体区域局部差异值,根据差异值计算图像融合权重,当差异值越小时,当前图的权重比例越大:
根据权重值进行两幅图像的融合,融合的公式为:。7.根据权利要求1所述的基于图像配准和动态目标融合的去湍流方法,其特征在于,图像细节增强具体步骤为:对步骤三得到的融合图像进行分块,块的大小为m*n,m和n分别为块的行和列大小;对每个块采用导向滤波,分解为基础层图像和细节层图像,计算每个块的纹理复杂度,复杂度为该块的梯度值,具体公式如下所示: ,
ꢀꢀ
其中为图像像素值;采用基于纹理复杂度的方法计算每个块的细节增强比例值,最后和基础层叠加形成细节增强图像,细节增强比例值和细节增强图像计算如下:,。
技术总结
本发明公开了一种基于图像配准和动态目标融合的去湍流方法,包括步骤:获取湍流干扰后的图像序列,搭建基于深度学习非刚性配准网络,对网络进行初始化后进行迭代优化获取去湍流形变图像;提取当前图像的运动目标:采用vibe前景提取算法提取场景中的运动目标部分,形成运动目标掩膜;对去湍流形变图像和原图图像运动区域进行局部区域融合,得到包含当前运动目标的去除了湍流的图;采用基于分块导向滤波算法增强图像细节部分,得到清晰的去湍流图像。本发明采用基于深度学习非刚性配准得到去湍流图像;采用运动目标提取算法,将运动目标部分与去湍流的图像进行融合,可有效去除运动目标的拖影以及运动目标模糊问题。目标的拖影以及运动目标模糊问题。目标的拖影以及运动目标模糊问题。
技术研发人员:彭蓉华 黄飞 余知音 向北海
受保护的技术使用者:长沙超创电子科技有限公司
技术研发日:2022.10.21
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。