1.本发明属于自动化苗床控制技术领域,具体涉及一种多层自动化苗床控制系统。
背景技术:
2.随着我国设施农业产业的发展及从业劳动人员的紧缺,自动化移动苗床作为一种全新的自动农业生产设施以其省力、节能的优点逐渐得到了认可和发展。传统苗床位置相对固定,只能通过人工来改变其位置,这就导致人力成本巨大、生产效率低下。因此在实际的温室植物培育过程中,实现苗床在温室内的循环流动对温室的发展具有重要意义。现有的苗床自动化程度不高,只能实现局部范围的移动,而且苗床附加的功能较少,无法实现整个温室大棚自动化运行、调度、数据采集等功能。本发明旨在实现一种全自动移动的苗床,同时可以实现环境参数的数据采集、自动识别、补光灯控制、自动喷灌及病虫害识别功能。
技术实现要素:
3.针对现有技术中存在的不足,本发明提供一种多层自动化苗床控制系统。
4.一种多层自动化苗床控制系统,包括苗床床体、苗床架、上架系统、下架系统、转向系统、人工操作区、自动操作区(图像识别及微喷系统)和控制系统。
5.苗床床体:用于运送栽培的作物,安装有导轮、苗床控制板、补光灯、拨码开关、蓄电池、光感应开关和条码标签。是整个苗床转运系统的关键部件。
6.苗床架:由苗床导轨组成,用于放置苗床床体,苗床导轨端面设置有条码标签,包含苗床导轨的行号。
7.上架系统、下架系统:用于将苗床床体运送到指定位置上,然后将苗床床体升起,并将苗床床体推入到苗床导轨上。上架系统和下架系统由送料小车来完成,送料小车包括送料小车车体、送料小车条码阅读器、横向导轨、纵向导轨、导电轮及升降气缸;送料小车根据设置位置和功能不同分为上料小车和下料小车,分别对应上架系统和下架系统。
8.转向系统:包括右转向桥架和左转向桥架,用于实现将苗床床体的转弯动作,通过右转向桥架将苗床床体逆时针旋转90度,最终将苗床床体推入上料小车导轨,通过左转向桥架将苗床床体逆时针旋转90度,最终将苗床床体推入第一人工操作区。
9.人工操作区:分为第一人工操作区和第二人工操作区,分别位于自动操作区的两侧;人工操作区中设置有驱动轮用于推动苗床床体运动,人工操作区由人工对苗床进行必要的操作,第一人工操作区完成操作后通过驱动轮推动苗床床体驶入自动操作区。第一人工操作区完成除草,添加基质等必要操作;第二人工操作区完成种植作物移出以及添加新作物。
10.自动操作区:在自动操作区内,设有图像识别及微喷系统,当苗床床体经过的时候,先对苗床床体进行图像识别,以便于识别出病虫害的作物。之后,根据苗床床体上的条码标签判断植物种类,进行针对性的微喷作业完成后将苗床床体送入第二人工操作区。
11.控制系统:设置在控制机柜中,用于完成多层自动化苗床控制系统的控制功能,上
料小车的运动、下料小车的运动、图像识别及微喷操作、数据记录和查询功能。
12.苗床床体上架的流程为:控制系统计算当前苗床床体需要放入第几行和第几层。然后控制第二人工操作区内的驱动轮转动,从而将苗床床体推入右转向桥架上。之后,右转向桥架逆时针旋转90度,以保证苗床床体由横向变为竖向。旋转到位后,右转向桥架将苗床床体推到上料小车,苗床床体在上料小车上到位后,上料小车将苗床床体送到指定的行号处。上料小车每经过一行苗床架,送料小车条码阅读器会扫描苗床导轨上的条码标签,以判断当前小车运行到第几行。到了指定的行号后,上料小车将苗床床体升起到相应的层号,到位后,上料小车将苗床床体推入相应层的苗床架上。之后该苗床床体会推动后一个苗床床体继续运动,最终该行最末端的苗床床体会被推入下料小车中,上料小车和下料小车必须同时工作,才能保证上料和下料的顺利进行。下料小车将苗床床体送到左转向桥架上,到位后,左转向桥架将会逆时针旋转90度,将苗床床体由竖向变成横向,之后,通过推进轴电机带动挡板电推杆的运动,将苗床床体推入第一人工操作区。至此,实现了苗床床体上料和下料的全过程。
13.本发明有益效果如下:
14.本发明实现了多层苗床全自动运行,极大减少了人工操作,有效利用了温室大棚内的空间。通过控制系统实现苗床精准定位,数据采集、自动识别、补光灯控制、自动喷灌及病虫害识别。最终实现作物有较好的生长环境,同时极大提高了生产效率。
附图说明
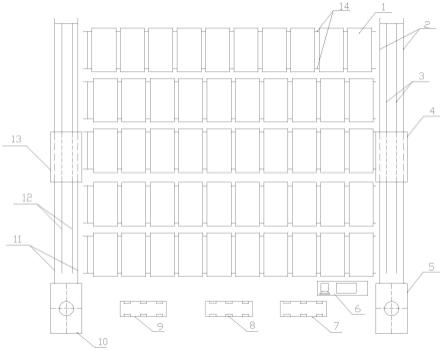
15.图1为本发明实施例系统结构示意图;
16.其中:1-苗床床体,2-上料小车导轨,3-上料小车导电带,4-上料小车,5-右转向桥架,6-控制机柜,7-第二人工操作区,8-自动操作区,9-第一人工操作区,10-左转向桥架,11-下料小车导轨,12-下料小车导电带,13-下料小车,14-苗床导轨;
17.图2为本发明实施例苗床床体上料动作流程图;
18.图3为本发明实施例苗床床体主视图和俯视图;
19.其中:101-纵向导轮,102-横向导轮,103-苗床控制板,104-1号补光灯,105-2号补光灯,106-3号补光灯,107-1号拨码开关,108-2号拨码开关,109-3号拨码开关,110-4号拨码开关,111-5号拨码开关,112-蓄电池,113-正极导电杆,114-负极导电杆,115-光感应开关,116-4号补光灯,117-5号补光灯,118-6号补光灯,119-条码标签,120-苗床主体,121-蓄电池充电器;
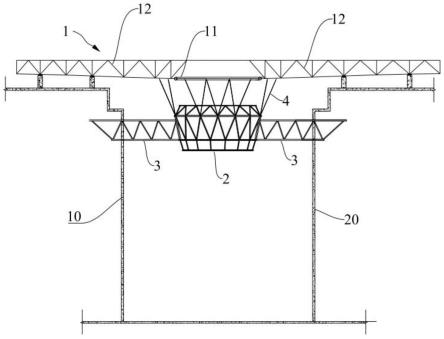
20.图4为本发明实施例送料小车主视图;
21.图5为本发明实施例送料小车左视图;
22.其中:301-横向导轨,302-接近开关,303-纵向导轨升降气缸,304-送料小车条码阅读器,305-送料小车车轮,306-正极导电轮,307-负极导电轮,308-送料小车车体,309-升降支撑杆,310-横向导轨升降气缸,311-纵向导轨,312-纵向推杆电机,313-纵向导轨伸缩杆,314-送料小车无线数传模块。
23.图6为本发明实施例右转向桥架主视图;
24.图7为本发明实施例右转向桥架左视图;
25.其中:201-横向导轨,202-转向机架,203-固定转轴,204-固定轴承,205-主动轮支
架,206-电机主动轮,207-辅助轮支架,208-辅助轮,209-右转向桥架控制器,210-推进轴电机,211-推进轴丝杆,212-推进轴轴承,213-挡板电推杆,214-挡板滑块,215-右刹车,216-左刹车,217一号到位开关(到位开关1),218二号到位开关(到位开关2),219转向桥架接近开关(接近开关3),220转向桥架无线数传模块。
26.图8为本发明实施例右转向桥架工作流程示意图;
27.图9为本发明实施例自动操作区主视图及左视图;
28.其中:401-右驱动轮,402-操作区床架,403-右支架,404-专用控制器,405-左支架,406-左驱动轮,407-摄像头架,408-视觉保护罩,409-辅助轮,410-摄像头,411-视觉移动丝杆,412-视觉系统驱动电机,413-微喷系统驱动电机,414-喷头支架,415-微喷系统丝杆,416-喷头装置,417-第一自动台架接近开关,418-第二自动台架接近开关,419-第三自动台架接近开关,420-1号拨码开关气缸、421-2号拨码开关气缸,422-3号拨码开关气缸,423-4号拨码开关气缸,424-5号拨码开关气缸。
29.图10为本发明实施例图像识别及微喷系统工作流程示意图。
具体实施方式
30.以下结合附图与实施例对本发明技术方案进行进一步描述。
31.如图1所示,一种多层自动化苗床控制系统,包括苗床床体1,上料小车导轨2,上料小车导电带3,上料小车4,右转向桥架5,控制机柜6,第二人工操作区7,自动操作区8,第一人工操作区9,左转向桥架10,下料小车导轨11,下料小车导电带12,下料小车13,苗床导轨14。第一人工操作区9、自动操作区8以及第二人工操作区7水平分布在一条直线上,相互间隔2米。第一人工操作区9和第二人工操作区7中均设有驱动轮,驱动轮均通过电缆与控制机柜6相连,由控制机柜6来输出电压控制驱动轮的旋转。左转向桥架10和右转向桥架5分别与下料小车导轨11和上料小车导轨2对齐,第二人工操作区7的后方设有控制机柜6。上料小车4在上料小车导轨2上运行,上料小车导轨2中间设有上料小车导电带3。苗床床体1在苗床导轨14上横向运行。下料小车13在下料小车导轨11上运行,下料小车导轨11中间设有下料小车导电带12,苗床导轨14端面设置有条码标签,包含苗床导轨的行号。
32.苗床床体1(如图3所示):用于运送栽培的作物,在苗床主体120下装有4个纵向导轮101,同时装有4个横向导轮102,这两组导轮的方向为垂直关系。苗床主体120下表面设有6个补光灯,分别是1号补光灯104、2号补光灯105、3号补光灯106、4号补光灯116、5号补光灯117和6号补光灯118。苗床主体120侧边设置有条码标签119;苗床主体120下部还设有5个拨码开关,分别是1号拨码开关107、2号拨码开关108、3号拨码开关109、4号拨码开关110和5号拨码开关111。在5个拨码开关的右侧设有苗床控制板103,用来接收5个拨码开关的信号状态,以及光感应开关115的信号。在苗床主体120下表面左侧设有蓄电池112,为整个苗床系统供电。在蓄电池112的左侧设有两根导电杆,分别是正极导电杆113和负极导电杆114,用来将上料小车或者下料小车上的电传入苗床床体1上的蓄电池充电器121,进而对蓄电池112进行充电。苗床主体120下表面最左侧设有光感应开关115,用来感受光照的强度。
33.上架系统和下架系统由送料小车来完成,送料小车(如图4,图5所示)包括上料小车4和下料小车13:上料小车4用于将苗床床体1运送到指定位置的苗床导轨14上,然后将苗床床体1升起,并将苗床床体1推入到苗床导轨14上,下料小车13用于通过横向导轮将苗床
床体1送入到左转向桥架10。送料小车车体308前端设置有送料小车条码阅读器304,用于扫描苗床导轨14上的条码标签;在送料小车车体308上装有4个横向导轨升降气缸310,横向导轨升降气缸310上部装有横向导轨301,为了保证横向导轨301升降的平稳运行,在送料小车车体308和横向导轨301之间装有升降支撑杆309。在横向导轨301下部装有4个纵向导轨升降气缸303,用于将苗床床体1升起来。同时,在横向导轨301下部装有纵向导轨311以及纵向推杆电机312,作用是将纵向导轨伸缩杆推送到苗床导轨14处,同时将苗床床体1推送到苗床导轨14上。送料小车车体308下部装有4个送料小车车轮305,使得送料小车在上料小车导轨2和下料小车导轨11上运行。送料小车车体308下部还装有正极导电轮306和负极导电轮307,这两个轮子与上料小车导电带3和下料小车导电带12接触,用来对送料小车的供电。送料小车车体308上装有送料小车无线数传模块314,该模块与控制机柜6中的无线数传模块进行数据通讯。
34.转向系统,包括右转向桥架5和左转向桥架10,用于实现将苗床床体1的转弯动作,通过右转向桥架5将苗床床体1逆时针旋转90度,最终将苗床床体1推入上料小车导轨,通过左转向桥架10将苗床床体1逆时针旋转90度,最终将苗床床体1推入第一人工操作区。
35.以右转向桥架5(如图6,图7所示)为例:用于实现将苗床床体1的转弯动作,使得苗床床体1能够逆时针旋转90度,将其放在横向导轨上。在转向机架202上装有横向导轨201以及右刹车215和左刹车216,左右刹车的作用是固定苗床床体1。同时,转向机架202上设有一号到位开关(到位开关1)217和二号到位开关(到位开关2)218,分别用来检测苗床床体1当前所处在的位置。在转向机架202中间设有推进轴电机210以及推进轴丝杆211和推进轴轴承212,在推进轴丝杆211上设有挡板滑块214和挡板电推杆213。在转向机架202下部设有主动轮支架205和电机主动轮206。在主动轮支架205的下部设有转向桥架接近开关(接近开关3)219。在主动轮支架205左边设有右转向桥架控制器209,作为整个右转向桥架5的控制核心部件,其中右转向桥架控制器209中设置有转向桥架无线数传模块220,用来和控制机柜6实现数据传送。在主动轮支架205左端设有辅助轮支架207。在转动的过程中,右转向桥架5的固定转轴203围绕固定轴承204旋转。
36.人工操作区:分为第一人工操作区9和第二人工操作区7,分别位于自动操作区8的两侧;人工操作区中设置有驱动轮用于推动苗床床体运动,人工操作区由人工对苗床进行必要的操作,第一人工操作区完成操作后通过驱动轮推动苗床床体驶入自动操作区;所述的必要的操作包括除草,添加基质。第二人工操作区完成种植作物移出以及添加新作物。
37.自动操作区(如图9所示):在自动操作区内,设有图像识别及微喷系统,当苗床床体1经过的时候,先进行图像识别,以便于识别出病虫害的作物。之后,根据条码判断植物种类,进行针对性的微喷作业。在操作区床架402上设有左驱动轮406,用来推动苗床床体1向右运行,左驱动轮406右侧设有第一自动台架接近开关(自动台架接近开关1)417,左支架405和右支架403用来支撑操作区床架402。操作区床架402上部左侧设有视觉保护罩408,内部装有视觉驱动电机412,视觉移动丝杆411。视觉移动丝杆411上装有摄像头架407和摄像头410,用来对植物进行图像识别。视觉保护罩408的右侧,设有第二自动台架接近开关(自动台架接近开关2)418,操作区床架402中间设有辅助轮409,用来支撑苗床床体1。辅助轮409右侧设有微喷装置,包括喷头装置416、喷头支架414、微喷系统丝杆415和微喷系统驱动电机413。操作区床架402的下部设有专用控制器404,用于协助控制机柜实现图像识别以及
喷灌控制。微喷装置右侧设置有第三自动台架接近开关(自动台架接近开关3)419;在操作区床架402的右侧,设有右驱动轮401,用来推动苗床床体1向右移动。
38.控制系统(如图10所示):设置在控制机柜中,用于完成多层自动化苗床控制系统的控制功能,上料小车的运动、下料小车的运动、图像识别及微喷操作、数据记录和查询功能。
39.苗床床体上架的流程为:控制系统计算当前苗床床体需要放入第几行和第几层。然后控制第二人工操作区内的驱动轮转动,从而将苗床床体推入右转向桥架上。之后,右转向桥架逆时针旋转90度,以保证苗床床体由横向变为竖向。旋转到位后,右转向桥架将苗床床体推到上料小车,苗床床体在上料小车上到位后,上料小车将苗床床体送到指定的行号处。上料小车每经过一行苗床架,送料小车条码阅读器会扫描苗床导轨上的条码标签,以判断当前小车运行到第几行。到了指定的行号后,上料小车将苗床床体升到相应的层号,到位后,上料小车将苗床床体推入相应层的苗床架上。之后该苗床床体会推动后一个苗床床体继续运动,最终该行最末端的苗床床体会被推入下料小车中,上料小车和下料小车必须同时工作,才能保证上料和下料的顺利进行。下料小车将苗床床体送到左转向桥架上,到位后,左转向桥架将会逆时针旋转90度,将苗床床体由竖向变成横向,之后,通过推进轴电机带动挡板电推杆的运动,将苗床床体推入第一人工操作区。至此,实现了苗床床体上料和下料的全过程。
40.如图3所示,在苗床床体上安装有4个纵向导轮和4个横向导轮,苗床床体通过纵向导轮在苗床导轨上运行,右转向桥架通过横向导轮将苗床床体推入到上料小车上,以及下料小车通过横向导轮将苗床床体送入到左转向桥架。苗床床体上安装有苗床控制板和1号拨码开关~5号拨码开关,苗床控制板根据5个拨码开关的状态来控制开启相应的补光灯,以及补光灯开启及关闭的间隔时间。同时结合光感应开关来决定是否开启补光灯,当光照强度低于设定值时,便开启补光灯,反之,当光照强度大于设定值时,关闭补光灯。苗床床体上设置有蓄电池、正极导电杆和负极导电杆,蓄电池作为苗床床体的总电源供给装置,用于给苗床控制板和补光灯供电;正极导电杆和负极导电杆用于给蓄电池充电,当苗床床体位于送料小车上时,并且小车正处于等待时间的过程中,送料小车通过正极导电杆和负极导电杆将电引入苗床床体上的蓄电池充电器,实现给蓄电池充电,以保证整个小车蓄电池的电量充足。条码标签贴在苗床床体上,用于控制机柜查询该苗床床体的信息,所述的苗床床体的信息包括苗床种植的作物类型、何时开始种植、何时浇水、何时施肥、生长时间等信息。补光灯分布在苗床床体上下两侧。拨码开关的位置与自动台架上的拨码开关气缸位置对齐。
41.如图4、5中所示,送料小车用于将苗床床体运送到指定行数的苗床导轨,然后将苗床床体升起,并将苗床床体推入到苗床导轨上。
42.在送料小车车体上安装有4个送料小车车轮,便于小车在上料小车导轨上运行。横向导轨的作用是使得苗床床体在小车上可以移动,便于苗床床体从右转向桥架上运送到送料小车上。送料小车条码阅读器的作用是使得当送料小车运行过程中,经过苗床导轨处时,扫描苗床导轨端面的条码标签,以此判断当前运行到第几行,当运行到指定的行号时停止。纵向导轨升降气缸作用是:当送料小车将苗床床体提升至指定层数后,接近开关将被触发,纵向导轨气缸提升,使得纵向导轨和相应层数的苗床导轨在一个水平面上,之后纵向导轨
伸缩杆伸出,便于和苗床导轨对接,这样苗床床体就可以被纵向推杆电机推入到苗床导轨上。正极导电轮和负极导电轮一直在导电带上接触并运行,给送料小车供电。升降支撑杆的作用是保证横向导轨在升降的过程中始终保持水平状态。升降气缸的作用是用来推举苗床床体,使得苗床床体的纵向导轮和纵向导轨伸缩杆处在同一个水平面,便于运动。
43.当苗床床体被推入到右转向桥架后,右转向桥架会逆时针旋转90度,使得苗床床体正对送料小车。之后将苗床床体推送到送料小车上。如图6、7所示。
44.当图像识别及微喷系统完成作业后,右驱动轮旋转,将苗床床体推动驶入右转向桥架,此时苗床床体在横向导轨上运行。当一号到位开关(到位开关1)被触发后,自动操作区右驱动轮停止驱动,变为辅助随动。之后,挡板电推杆升起,推进轴电机正向旋转,推动苗床床体向右运动。苗床床体在挡板电推杆的推动作用下继续向右运动,当触发二号到位开关(到位开关2)后停止运动。之后,推进轴电机停止旋转。苗床固定左刹车和苗床固定右刹车夹紧,将苗床床体1固定,此时苗床床体已被完全放入在右转向桥架中。之后,电机主动轮旋转,右转向桥架开始旋转,当转向桥架接近开关(接近开关3)触发后,电机主动轮停止运动,此时苗床床体已转动90度,准备纵向运动。之后,苗床固定左刹车和苗床固定右刹车松开,挡板电推杆下降复位,推进轴电机将挡板滑块推进至最左端,挡板电推杆再次升起,挡板滑块向右运动,将苗床床体推入上料小车导轨。之后,右转向桥架再恢复到初始位置,等待下一次的操作。
45.左转向桥架和右转向桥架工作原理相同,功能主要是将下料小车送来的苗床床体送至第一人工操作区。当下料小车将苗床床体送到左转向桥架后,挡板电推杆升起,之后推进轴电机旋转,将苗床床体拖入左转向桥架的横向导轨上,之后,挡板电推杆再次复位至转向机架的最左端。挡板电推杆再次升起,推进轴电机旋转,通过挡板滑块的运动,再次拖动苗床床体,将苗床床体完全拖到横向导轨上。之后左刹车和右刹车将苗床床体固定,保证左转向桥架旋转的时候,苗床床体不会晃动。之后,左转向桥架逆时针旋转90度,使得苗床床体和第一人工操作区对齐。之后,挡板电推杆升起,推进轴电机带动推进轴丝杆旋转,使得挡板滑块向左运动,以此将苗床床体推入到第一人工操作区中。
46.在第一人工操作区内,将由人工进行必要的操作,比如除草,添加基质等,之后第一人工操作区内的驱动轮推动苗床床体驶入自动操作区(图像识别及微喷系统)后,苗床床体在自动操作区上向右运行,当运行至第一自动台架接近开关(自动台架接近开关1)时停止。此时苗床床体前部已经进入自动操作区,第一人工操作区的驱动轮停止,自动台架左驱动轮旋转,苗床床体继续向右运动。当苗床床体运行至第二自动台架接近开关(自动台架接近开关2)的时候,自动操作区的左驱动轮停止旋转,苗床床体停止。此时,视觉系统驱动电机带动视觉移动丝杆旋转,摄像头架在视觉移动丝杆上移动,实现摄像头则纵向运行,进行视觉扫描。扫描一列完成后,苗床床体前进一段距离,准备进行下一列的扫描。当识别出病虫害后,则进行声光报警,此时,人工将其取出。在苗床床体向右运行过程中,当第三自动台架接近开关(自动台架接近开关3)触发的时候,开始进行微喷作业。此时,微喷系统驱动电机带动微喷系统丝杆旋转,喷头支架在微喷系统丝杆上移动,实现微喷头纵向运行,实现微喷作业。在此过程中,视觉系统和微喷系统同时作业,需要提前设置好这两套系统纵向位移速度,保证视觉识别和微喷作业的效果。当苗床床体左部触发第三自动台架接近开关(自动台架接近开关3)时,自动台架部分的作业完成。
47.以上内容是结合具体/优选的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员,在不脱离本发明构思的前提下,其还可以对这些已描述的实施方式做出若干替代或变型,而这些替代或变型方式都应当视为属于本发明的保护范围。
48.本发明未详细说明部分属于本领域技术人员公知技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。