技术特征:
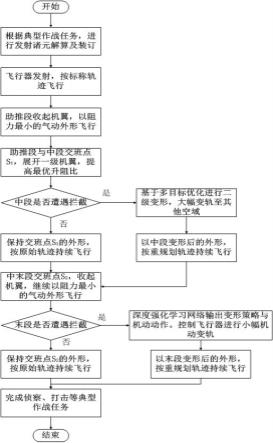
1.变形与机动一体化的规避与突防方法,其特征在于,包括:步骤1:根据作战任务,对滑翔飞行器进行发射诸元解算与发射诸元装订,获得预设的标称轨迹;步骤2:所述滑翔飞行器发射,并按所述预设的标称轨迹持续飞行;步骤3:若所述滑翔飞行器在中段遭遇敌方拦截,则通过展开弹翼,提高最大升阻比,或者通过收起弹翼,降低最大升阻比,实现滑翔飞行器的中段规避与突防;变形后的滑翔飞行器进行轨迹重规划,重规划后的轨迹保证滑翔飞行器完成原始的作战任务;步骤4:若滑翔飞行器在末段遭遇敌方拦截,则进行机动闪避从而在原始轨迹周围进行变轨,以实现飞行器的末段规避与突防,同时进行轨迹重规划,以保证其在机动变轨之后仍能完成原始任务;步骤5:若飞行器未遭遇敌方拦截,则按照步骤2中的标称轨迹持续飞行,直至完成作战任务。2.如权利要求1所述的变形与机动一体化的规避与突防方法,其特征在于,所述发射诸元包括发射方位角a、最大负攻角α
m
、三级俯仰角变化率φ3’
、剖面参数d
c
、标称攻角指令α
p
、标称倾侧角指令γ
vp
。3.如权利要求1所述的变形与机动一体化的规避与突防方法,其特征在于,所述步骤3中,变形后的滑翔飞行器进行轨迹重规划,具体步骤为:以变形的时机和变形后的飞行器参数组成为多目标变量;对于多目标变量x
origin
,首先进行分解得到单目标变量(x1,
…
,x
m
),m为单目标变量个数,之后对优化目标进行聚合更新,并验证是否满足终止条件:脱靶量大于10m且能够完成作战任务,若满足则输出最终优化结果x
best
,否则继续进行分解更新,直至满足终止条件,之后输出最终优化结果x
best
;根据最终优化结果确定重规划后的轨迹。4.如权利要求1~3任一所述的变形与机动一体化的规避与突防方法,其特征在于,所述步骤4具体为:当所述滑翔飞行器感知到敌方拦截时,感知单元将探测到的敌我双方实时态势信息传输给深度强化学习网络,所述敌我双方实时态势信息包括敌我双方相对距离r、相对视线角q作为网络的观测向量s
t
,网络内部则进行奖励函数r
t
的梯度更新;随着攻防对抗的进行,奖励函数逐渐收敛至取值最优,从而得到一个能够稳定输出规避与突防策略π
*
的深度强化学习神经网络模型,该网络模型用于稳定输出动作控制指令;所述动作控制指令包括过载控制指令或者姿态控制指令;此时,固定该网络模型的权重参数,当再次输入感知单元观测到的实时态势信息时,该网络模型即可稳定输出连续的动作控制指令,且保证在此连续动作控制指令的指导下,滑翔飞行器实现实时的规避与突防,并且最终完成原始作战任务。5.如权利要求4所述的变形与机动一体化的规避与突防方法,其特征在于,所述奖励函数r
t
的主线回报设计为:脱靶量大于10m且能完成原始任务。
技术总结
本发明公开了一种变形与机动一体化的规避与突防方法,涉及飞行器规避与突防技术领域,该方法适用于多种飞行器,具有泛化性。首先根据作战任务,对滑翔飞行器进行发射诸元解算与发射诸元装订,获得预设的标称轨迹。滑翔飞行器发射,并按预设的标称轨迹持续飞行。若飞行器在中段遭遇敌方拦截,则通过机翼变形实现滑翔飞行器的中段规避与突防;变形后的滑翔飞行器进行轨迹重规划,保证滑翔飞行器完成原始的作战任务。若飞行器在末段遭遇敌方拦截,则进行机动闪避在原始轨迹周围进行变轨,以实现末段规避与突防,同时进行轨迹重规划,保证在机动变轨之后仍能完成原始任务。若飞行器未遭遇敌方拦截,则按照标称轨迹持续飞行,直至完成作战任务。成作战任务。成作战任务。
技术研发人员:王玥 李柯绪 刘鑫渝 吴若愚 刘劲涛
受保护的技术使用者:北京理工大学
技术研发日:2022.10.18
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。