1.本发明涉及医疗器械技术领域,尤其是一种可快速更换的软式内镜执行机构。本发明还涉及设有所述软式内镜执行机构的软式内镜输送装置。
背景技术:
2.消化道、呼吸道等自然腔道是人类常见疾病好发部位,由于病灶处于人体自然腔道内部,因此需要通过软式内镜进行检查或手术治疗。
3.传统的软式内镜检查或手术,需要人双手配合持镜体、操作旋钮、手工输送镜体等动作完成操作过程;有的检查或手术需要在放射线的图像引导下进行,医务人员需要穿戴沉重的铅制防护服等长时间手工操作软式内镜,对医务人员诊疗操作质量、体力和健康影响较大,尤其对经验丰富的年长或女性医务人员制约更大,甚至被迫放弃内镜工作。
4.随着机器人辅助技术的发展,医生可以通过调节手柄开关和按钮就可以调节软式内镜的输送长度和姿态,可以大大降低医生的体力和手工操作疲劳,降低手术的操作要求,减少对医务人员的辐射,同时可以提高医务人员与影像之间的交互。
5.但是,已有的软式内镜输送装置在进行操作时,存在旋转不够灵活、容易打滑、无法连续输送等问题,而且,结构复杂、体积大,安装和更换都不是很方便,没有解决污染问题。
技术实现要素:
6.本发明的目的在于提供一种可快速更换的软式内镜执行机构,以解决上述技术问题。
7.本发明的另一目的在于提供一种设有所述软式内镜执行机构的输送装置。
8.为实现上述目的,本发明提供一种可快速更换的软式内镜执行机构,包括壳体和设于所述壳体内部的夹紧输送机构,所述夹紧输送机构包括多个沿圆周方向排列分布的旋转运动机构,所述旋转运行机构之间形成供软式内镜穿过的输送通道,所述壳体的两端设有对应于所述输送通道的通孔;所述旋转运行机构设有夹紧动作机构,所述夹紧动作机构用于通过执行夹紧动作使所述旋转运动机构所形成的输送通道空间变小,从而使所述旋转运行机构夹紧或放松软式内镜,所述旋转运行机构运行时带动被夹紧的软式内镜前后移动。
9.可选地,多个所述旋转运动机构均为履带机构,或者,多个所述旋转运动机构均为滚轮机构,或者,多个所述旋转运动机构中的一部分为履带机构,另一部分为滚轮机构。
10.可选地,多个所述旋转运行机构包括主动旋转运行机构和从动旋转运行机构,所述夹紧动作机构设于所述从动旋转运行机构,以带动所述从动旋转运动机构接近或远离所述主动旋转运行机构。
11.可选地,所述主动旋转运行机构的数量为两个,两个所述主动旋转运行机构位于输送通道的上方且左右对称设置,两者在输送通道的截面上呈倒“v”形布置。
12.可选地,所述从动旋转运行机构位于所述输送通道的下方并安装于承载件,所述承载件设有导轨,所述从动旋转运行机构能够沿所述导轨上下移动,以接近或远离所述主动旋转运行机构。
13.可选地,所述主动旋转运行机构和从动旋转运行机构均为履带机构;或者,所述主动旋转运行机构和从动旋转运行机构均为滚轮机构;或者,所述主动旋转运行机构为履带机构,所述从动旋转运行机构为滚轮机构;或者,所述主动旋转运行机构为滚轮机构,所述从动旋转运行机构为履带机构。
14.可选地,所述夹紧动作机构为剪叉机构;所述剪叉机构包括剪叉连杆组件、滑轮、缠绕轴以及钢丝绳,所述剪叉连杆组件安装于连杆固定座,其一端连接所述从动旋转运行机构,另一端连接钢丝绳,所述连杆固定座设有带动所述剪叉连杆组件缩短的弹簧;所述钢丝绳一端连接于剪叉连杆组件,另一端绕经滑轮缠绕于缠绕轴,所述缠绕轴旋转时通过钢丝绳拉动所述剪叉连杆组件伸长。
15.可选地,所述夹紧动作机构为凸轮机构;所述凸轮机构包括凸轮轴、凸轮轴支撑座以及从动滚轮;所述凸轮轴安装于所述凸轮轴支撑座,所述从动滚轮安装于所述从动旋转运行机构的下方,所述凸轮轴上的凸轮与所述从动滚轮传动配合。
16.可选地,所述夹紧动作机构为丝杠锥齿轮机构;所述丝杠锥齿轮机构包括锥齿轮轴、第一锥齿轮、第二锥齿轮、丝杠、丝杠滑块和连接块;所述连接块固定于所述从动旋转运行机构,所述丝杠滑块与连接块通过凹凸插接结构相连,所述丝杆竖向安装于丝杠固定座,所述丝杠滑块安装于所述丝杠,所述第一锥齿轮固定于丝杠,所述第二锥齿轮安装于锥齿轮轴,第一锥齿轮与第二锥齿轮相互啮合。
17.可选地,所述夹紧动作机构为丝杠滑块机构;所述丝杠滑块机构包括丝杠轴、丝杠、丝杠滑块和连接块;所述连接块固定于所述从动旋转运行机构,所述连接块底部设有楔形导槽;所述丝杠滑块的顶部设有楔形滑台,所述丝杠滑块安装于丝杠,所述丝杠安装于丝杠固定座。
18.可选地,所述夹紧动作机构为丝杠连杆机构;所述丝杠连杆机构包括丝杠、丝杠滑块、第一连杆、第二连杆和连接块;所述连接块固定于所述从动旋转运行机构,所述丝杠安装于丝杠固定座,所述丝杠滑块安装于丝杠,两组所述第一连杆和第二连杆分别位于连接块两侧,所述第一连杆与第二连杆交叉成“x”形并相互铰接,所述第一连杆的一端与所述连接块相连接,另一端连接于丝杠固定座,所述第二连杆的一端与所述连接块相连接,另一端连接于丝杠滑块。
19.可选地,所述夹紧动作机构为气囊夹紧机构;所述气囊夹紧机构包括气泵、环形气囊以及气管,所述环形气囊套装于所述履带机构的履带和/或所述滚轮机构的滚轮,所述气泵通过气管与各所述环形气囊相连接。
20.为实现上述另一目的,本发明提供一种软式内镜输送装置,包括主机体和设于所述主机体内部或前端的执行机构,所述执行机构为上述任一项所述的软式内镜执行机构;所述主机体设有执行驱动机构、旋转体和旋转驱动机构;所述软式内镜执行机构可拆卸地安装于所述旋转体;所述执行驱动机构包括夹紧驱动机构和输送驱动机构,所述夹紧驱动机构与所述夹紧动作机构传动连接,以带动所述从动旋转运行机构接近或远离所述主动旋转运行机构,从而夹紧或放松软式内镜;所述输送驱动机构与所述主动旋转运行机构传动
连接,以向前或向后输送被夹紧的软式内镜;所述旋转驱动机构与所述旋转体传动连接,以驱动所述旋转体和软式内镜执行机构进行转动,从而带动软式内镜旋转。
21.为实现上述另一目的,本发明提供另一种软式内镜输送装置,包括主机体和设于所述主机体内部或前端的执行机构,所述执行机构为上述最后一项软式内镜执行机构;所述主机体设有执行驱动机构、旋转体和旋转驱动机构;所述软式内镜执行机构可拆卸地安装于所述旋转体;所述执行驱动机构包括输送驱动机构,所述输送驱动机构与所述旋转运行机构传动连接,以向前或向后输送被夹紧的软式内镜;所述旋转驱动机构与所述旋转体传动连接,以驱动所述旋转体和软式内镜执行机构进行转动,从而带动软式内镜旋转。
22.本发明所提供的可快速更换的软式内镜执行机构,具有夹紧和输送软式内镜的功能,在夹紧时可以获得适当的摩擦力,从而有效地防止软式内镜在输送时打滑,并实现连续输送,其能够适用于多种尺寸的软式内镜,并能够防止因夹紧力太大导致软式内镜损坏,不仅结构紧凑、体积小、重量轻,而且,安装和更换方便快捷。
23.本发明所提供的软式内镜输送装置,通过执行机构可实现对软式内镜进行夹紧然后进行输送的功能,通过旋转体和旋转驱动机构可实现使软式内镜进行旋转的功能,在进行操作时,软式内镜可单独进行输送,也可以单独进行旋转,还可以在输送的同时进行旋转,从而能够更加灵活地对软式内镜进行操作,执行更为精细化的动作。
24.而且,执行机构采用模块化设计,通过快接机构可拆卸地安装于旋转体,能够独立进行安装和拆卸,手术结束后可快速拆除,重新更换新的执行机构对接使用,大大降低了手术前的准备时间,可以有效避免交叉污染。
附图说明
25.图1是本发明实施例所提供的一种可快速更换的软式内镜执行机构的结构示意图;
26.图2是图1中所示剪叉机构的结构示意图;
27.图3是图2中所示剪叉连杆组件的结构示意图;
28.图4是夹紧动作机构为凸轮机构的结构示意图;
29.图5是夹紧动作机构为丝杠锥齿轮机构的结构示意图;
30.图6是夹紧动作机构为丝杠滑块机构的结构示意图;
31.图7是夹紧动作机构为丝杠连杆机构的结构示意图;
32.图8是图7所示丝杠连杆机构在另一视角下的轴侧图;
33.图9是第一履带机构和第二履带机构设有传动组件的结构示意图;
34.图10是主动旋转运行机构和从动旋转运行机构均为滚轮机构的结构示意图;
35.图11是夹紧动作机构为气囊夹紧机构的结构示意图;
36.图12是本发明实施例所提供的一种软式内镜输送装置的结构示意图;
37.图13是图12所示软式内镜输送装置的内部结构示意图;
38.图14是图13所示软式内镜输送装置的俯视图。
39.图中:
40.10.壳体
41.110.第一履带机构120.第二履带机构130.第三履带机131.履带导轨131
42.200.剪叉机构210.剪叉连杆组件211.滑轮212.缠绕轴213.钢丝绳214.第一铰轴215.第二铰轴216.连杆固定座218.拉簧
43.300.凸轮机构310.凸轮轴320.凸轮轴支撑座330.从动滚轮340.滚轮安装架350.凸轮
44.400.丝杠锥齿轮机构410.锥齿轮轴420.第一锥齿轮430.第二锥齿轮440.丝杠450.丝杠滑块460.连接块
45.500.丝杠滑块机构510.丝杠轴520.丝杠530.丝杠滑块531.楔形滑台540.连接块541.楔形导槽550.丝杠固定座
46.600.丝杠连杆机构610.丝杠620.丝杠滑块630.第一连杆640.第二连杆650.连接块660.丝杠固定座
47.710.第一锥齿轮720.第二锥齿轮730.第三锥齿轮740.第四锥齿轮
48.810.第一滚轮机构820.第二滚轮机构830.第三滚轮机构
49.840.气泵850.环形气囊860.气管
50.910.主机壳体920.执行机构9311.夹紧电机9312.夹紧传动轴9321.输送电机9322.输送传动轴933.第一传动件934.第二传动件940.转盘950.旋转驱动机构951.旋转电机952.第一齿轮953.第二齿轮
51.100.旋转支撑机构
具体实施方式
52.为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
53.在本文中,“上、下、内、外”等用语是基于附图所示的位置关系而确立的,根据附图的不同,相应的位置关系也有可能随之发生变化,因此,并不能将其理解为对保护范围的绝对限定;而且,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个与另一个具有相同名称的部件区分开来,而不一定要求或者暗示这些部件之间存在任何这种实际的关系或者顺序。
54.请参考图1至图3,图1是本发明实施例所提供的一种可快速更换的软式内镜执行机构的结构示意图;图2是图1中所示剪叉机构的结构示意图;图3是图2中所示剪叉连杆组件的结构示意图。
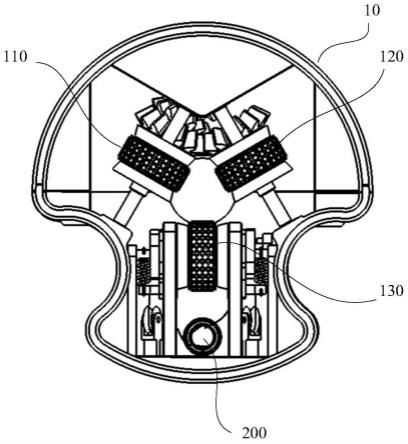
55.在一种具体实施例中,本发明所提供的可快速更换的软式内镜执行机构,主要由壳体10和三个沿圆周方向排列分布的履带机构组成,三个履带机构的履带面之间形成供软式内镜穿过的输送通道。
56.具体地,三个履带机构分别为第一履带机构110、第二履带机构120和第三履带机130,第一履带机构110和第二履带机构120主动履带,第三履带机构130为从动履带,第一履带机构110和第二履带机构120位于输送通道的上方且左右对称设置,两者的履带面在输送通道的截面上呈倒“v”形,第三履带机构130位于输送通道的下方。
57.第一履带机构110和第二履带机构120通过其履带轴进行安装,第三履带机构130通过履带导轨轴安装于履带导轨131,第三履带机构130能够沿履带导轨131限定的方向向接近或远离第一履带机构110和第二履带机构120的方向移动,从而实现夹紧或放松软式内
镜的功能。
58.第三履带机构130设有夹紧动作机构,在本实施例中,夹紧动作机构为剪叉机构200,其包括剪叉连杆组件210、滑轮211、缠绕轴212以及钢丝绳213,剪叉连杆组件210通过第一铰轴214安装于连杆固定座216,其上端连接第三履带机构130,下端的第二铰轴215连接钢丝绳213,连杆固定座216设有带动剪叉连杆组件210缩短的拉簧218,钢丝绳213一端连接于剪叉连杆组210件的连杆,另一端绕经滑轮缠绕于缠绕轴。
59.具体地,剪叉连杆组件210主要由第一连杆、第二连杆、第三连杆、第四连杆组成,第一连杆与第二连杆通过第一铰轴相214铰接,呈交叉的“x”形,第一连杆与第二连杆的一端固定在第三履带机构130的盖板上,另一端分别与第三连杆、第四连杆相铰接,第一铰轴214通过轴孔配合安装在连杆固定座216上,第三连杆和第四连杆的下端通过第二铰轴215相铰接,呈“v”形,第二铰轴215与连杆固定座216通过拉簧218相连,钢丝绳213一端系在第二铰轴215上。
60.工作时,通过缠绕轴212的转动,实现钢丝绳213在缠绕轴凹槽里的缠绕或放松,当缠绕轴212正转时,钢丝绳213通过滑轮211开始下拉第二铰轴215,第一连杆和第二连杆的上端开始向上运动,带动第三履带机构130向上运动,此时,拉簧218处于拉伸状态,当缠绕轴212反转时,钢丝绳213的拉力逐渐减小直至消失,此时依靠拉簧218回弹的力,使第三履带机构130回到初始位置。
61.请参考图4,图4是夹紧动作机构为凸轮机构的结构示意图。
62.在另一实施例中,夹紧动作机构为凸轮机构300,此凸轮机构300主要由凸轮轴310、凸轮轴支撑座320、从动滚轮330以及滚轮安装架340组成,凸轮轴310安装于凸轮轴支撑座320,从动滚轮330通过滚轮安装架340安装于第三履带机构130的下方,凸轮轴310上的凸轮350与从动滚轮330传动配合,当凸轮轴310转动时,可以通过凸轮350和从动滚轮330的配合,带动第三履带机构130上、下往复运动,从而实现对软式内镜的夹紧、放松。
63.本实施例与第一实施例相同的部分,给予相同的附图标记,并省略相同的文字说明。
64.请参考图5,图5是夹紧动作机构为丝杠锥齿轮机构的结构示意图。
65.在又一实施例中,夹紧动作机构为丝杠锥齿轮机构400,此丝杠锥齿轮机构400主要由锥齿轮轴410、第一锥齿轮420、第二锥齿轮430、丝杠440、丝杠滑块450和连接块460组成;连接块460固定于第三履带机构130,丝杠滑块450与连接块460通过凹凸插接结构相连,丝杆440竖向安装于丝杠固定座,丝杠滑块450安装于丝杠440,能够在丝杠440上旋转运动,第一锥齿轮420固定于丝杠440,第二锥齿轮430安装于锥齿轮轴410,第一锥齿轮420与第二锥齿轮430相互啮合。
66.工作时,锥齿轮轴410的转动带动第二锥齿轮430的转动,从而带动第一锥齿轮420及丝杠440的转动,丝杠440转动,而丝杠滑块450与连接块460插接相连,无法转动,故丝杠滑块450只能向上运动,从而推动连接块460向上运动,连接块460固定在第三履带机构130上,从而带动第三履带机构130的向上运动,实现软式内镜的夹紧,反之则可以放松软式内镜。
67.本实施例与上述实施例相同的部分,给予相同的附图标记,并省略相同的文字说明。
68.请参考图6,图6是夹紧动作机构为丝杠滑块机构的结构示意图。
69.在另一实施例中,夹紧动作机构为丝杠滑块机构500,此丝杠滑块机构500主要由丝杠轴510、丝杠520、丝杠滑块530和连接块540组成,连接块540固定于第三履带机构130,连接块540底部设有楔形导槽541,丝杠滑块530的顶部设有楔形滑台531,丝杠滑块530安装于丝杠520,丝杠520安装于丝杠固定座550。
70.工作时,丝杠520转动,而丝杠滑块530上端的楔形滑台531在连接块540底端楔形导541槽内,此时丝杠滑块530无法转动,只能向前运动,通过其楔形滑台531推动连接块540向上运动,从而使第三履带机构130向上运动,从而实现了软式内镜的夹紧,反之则可以放松软式内镜。
71.本实施例与上述实施例相同的部分,给予相同的附图标记,并省略相同的文字说明。
72.请参考图7、图8,图7是夹紧动作机构为丝杠连杆机构的结构示意图;请参考图8,图8是图7所示丝杠连杆机构在另一视角下的轴侧图。
73.在又一实施例中,夹紧动作机构为丝杠连杆机构600,此丝杠连杆机构600主要由丝杠610、丝杠滑块620、第一连杆630、第二连杆640和连接块650组成。
74.连接块650固定于第三履带机构130,丝杠610安装于丝杠固定座660,丝杠滑块620安装于丝杠610,两组第一连杆630和第二连杆640分别位于连接块650两侧,第一连杆630与第二连杆640交叉成“x”形并相互铰接,第一连杆630的一端与连接块650相连接,另一端连接于丝杠固定座660,第二连杆640的一端与连接块650相连接,另一端连接于丝杠滑块620。
75.工作时,丝杠610的旋转带动丝杠滑块620作前进运动,从而通过连杆使连接块650实现向上运动,连接块650固定在第三履带机构130上,从而带动第三履带机构130向上运动,从而实现了软式内镜的夹紧,反之则可以放松软式内镜。
76.本实施例与上述实施例相同的部分,给予相同的附图标记,并省略相同的文字说明。
77.请参考图9,图9是第一履带机构和第二履带机构设有传动组件的结构示意图。
78.第一履带机构110和第二履带机构120可以由电机通过传动组件进行驱动,输送电机与传动组件相连,传动组件与履带机构相连,输送电机输出轴的转动通过传动组件,变成履带机构履带的转动,通过履带机构的履带转动实现软式内镜的输送。
79.具体地,传动组件主要由第一锥齿轮710、第二锥齿轮720、第三锥齿轮730和第四锥齿轮740组成,第一锥齿轮710的转轴沿前后方向布置,第二锥齿轮720和第三锥齿轮730为同轴叠加的联体齿轮,其安装于第一履带机构110的履带轴,第四锥齿轮740安装于第二履带机构120的履带轴;第一锥齿轮710与第二锥齿轮720啮合传动,第三锥齿轮730与第四锥齿轮740啮合传动。
80.当第一锥齿轮710转动时,可同时驱动第三锥齿轮730和第四锥齿轮740转动,进而带动第一履带机构110和第二履带机构120运行,实现对软式内镜的输送。
81.当然,履带机构可以是三个,也可以是多个,这里对数量不做限制,同时,锥齿轮的轴交角可以是90
°
,也可以是60
°
,还可以是其它度数,这里对轴交角度数不做限制。
82.请参考图10,图10是主动旋转运行机构和从动旋转运行机构均为滚轮机构的结构示意图。
83.在另一实施例中,可以采用第一滚轮机构810、第二滚轮机构820、第三滚轮机构830代替第一履带机构110、第二履带机构120、第三履带机构130,也就是说,主动旋转运行机构和从动旋转运行机构可以都是滚轮机构,其布置方式与履带机构大体相同,请参考上文。
84.工作时,输送电机与传动组件相连,传动组件与滚轮机构相连,输送电机输出轴的转动通过传动组件,变成滚轮机构滚轮的转动,通过滚轮机构的滚轮转动实现软式内镜的输送。
85.可以理解,在其他实施例中,履带机构和滚轮机构还可以搭配使用,例如主动旋转运行机构为履带机构,从动旋转运行机构为滚轮机构;或者,主动旋转运行机构为滚轮机构,从动旋转运行机构为履带机构,等等。
86.请参考图11,图11是夹紧动作机构为气囊夹紧机构的结构示意图。
87.在另一实施例中,夹紧动作机构为气囊夹紧机构,此气囊夹紧机构主要由气泵840、环形气囊850以及气管860组成,环形气囊850套装于履带机构的履带上,也可以套装在滚轮机构的滚轮上,多个环形气囊850之间形成输送通道,气泵840通过气管860与各环形气囊850相连接。
88.工作时,软式内镜穿过多个环形气囊850形成的输送通道,气泵840通过气管860向环形气囊850充气,环形气囊850膨胀,输送通道的空间变小,从而夹紧软式内镜,反之则可以放松软式内镜。
89.若采用气囊夹紧机构来夹紧软式内镜,则履带机构或滚轮机构既可以是固定的,也可以是能够移动的,还可以是既有固定又有移动的,这里不做限制。
90.请参考图12、图13、图14,图12是本发明实施例所提供的一种软式内镜输送装置的结构示意图;图13是图12所示软式内镜输送装置的内部结构示意图;图14是图13所示软式内镜输送装置的俯视图。
91.本实施例提供的软式内镜输送装置适用于在手术过程中,对软式内镜进行操作,以完成人体自然腔道的介入检查、诊断,其主要由主机壳体910、执行机构920、执行驱动机构、转盘940以及旋转驱动机构950等部分构成,其中,转盘940为旋转体,执行驱动机920构安装在转盘940上,执行机构920通过快接机构以可拆卸的方式安装于转盘940的前侧,执行机构920为上文所描述的软式内镜执行机构,转盘940上的执行驱动机构与夹紧输送机构相连接,以驱动夹紧输送机构夹紧软式内镜并在夹紧后带动软式内镜移动,从而向前或向后输送软式内镜,旋转驱动机构950与转盘940传动连接,以驱动转盘940以及转盘上的执行机构920一起进行转动,从而带动软式内镜旋转。
92.执行驱动机构分为夹紧驱动机构和输送驱动机构,两者均安装在转盘940上。
93.其中,输送驱动机构主要由输送电机9321和输送传动轴9322构成,输送传动轴9322通过轴承可转动地安装于转盘940的前侧,输送电机9321和输送传动轴9322相平行,两者沿轴向方向延伸,输送电机9321的转轴与输送传动轴9322通过位于转盘940后侧的第一传动件933传动连接,第一传动件933可以是同步带和同步带轮。
94.同理,夹紧驱动机构主要由夹紧电机9311和夹紧传动轴9312构成,夹紧传动轴9312通过轴承可转动地安装于转盘940的前侧,夹紧电机9311和夹紧传动轴9312相平行,两者沿轴向方向延伸,夹紧电机9311的输出轴与夹紧传动轴9312通过位于转盘940后侧的第
二传动件934传动连接,第二传动件934可以是同步带和同步带轮。
95.这种结构,由于输送电机9321、夹紧电机9311和输送传动轴9322、夹紧传动轴9312都位于转盘940的前侧,而不是位于转盘940的后侧,因此,可以有效减少执行驱动机构920的轴向长度。
96.此外,输送电机9321和夹紧电机9311分别位于执行机构920的左下侧和右下侧,执行机构920的壳体10在左下侧和右下侧设有对称的弧形内凹部位,以让位于输送电机9321和夹紧电机9311。这种布局方式,能够使产品结构变得更为合理、紧凑,从而使产品体积更小。
97.当然,在其他实施例中,输送电机9321与输送传动轴9322之间、夹紧电机9311与夹紧传动轴9312之间也可以采用齿轮等方式进行传动。
98.旋转驱动机构950的旋转电机951通过支架安装于主机壳体910内部,旋转电机951通过旋转传动机构与转盘940传动连接。
99.具体地,旋转传动机构主要由第一齿轮952和第二齿轮953构成,第一齿轮952与转盘940同轴设置并通过轴向连接柱与转盘940相互连接,旋转电机951的输出轴通过第二齿轮953与第一齿轮952啮合传动,转盘940和第一齿轮952的中部均开设有供软式内镜穿过的通孔。
100.为了保证旋转的稳定性,第一齿轮952的后侧还设有旋转支撑机构100,此旋转支撑机构100可以是环形导轨滑块机构或轴承机构,这里不做限制。
101.若采用图11所示的夹紧输送机构,则由于夹紧动作机构为气囊夹紧机构,其在从动履带机构或从动滚轮机构不移动的情况下,也能够夹紧软式内镜,因此,也可以省略夹紧驱动机构。
102.在以上实施例中,还可以为夹紧输送机构增设力传感机构,此力传感机构可以由力传感器和力传感器固定架组成,力传感器通过力传感器固定架固定到夹紧输送机构上,通过力传感器对夹紧力进行检测,可以为医生实时提供信息,方便医生做出判断。
103.以上对本发明所提供的可快速更换的软式内镜执行机构和软式内镜输送装置进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。