1.本发明涉及大气颗粒物检测技术领域,尤其涉及一种基于激光雷达的大气颗粒物检测方法及系统。
背景技术:
2.随着社会经济的快速发展,各种环境问题也层出不穷,其中,大气污染,尤其是颗粒物污染具有广泛的空间分布,对人体健康和空气质量产生了较大的危害。大气颗粒物是大气中存在的各种固态和液态颗粒状物质的总称,平常所见到的灰尘、熏烟、烟、雾、霾等都属于气溶胶的范畴。因此,大气颗粒物的准确检测对空气环境质量和大气污染防治有着重要的现实意义。
3.然而,现有技术对大气颗粒物检测不全面,测量精度不高,导致无法全面反映大气颗粒物分布的技术问题。
技术实现要素:
4.本技术通过提供一种基于激光雷达的大气颗粒物检测方法及系统,解决了现有技术对大气颗粒物检测不全面,测量精度不高,导致无法全面反映大气颗粒物分布的技术问题,达到通过对大气颗粒物分布情况进行预测,确定激光雷达监测点位分布,对大气颗粒物检测更加全面准确,提高测量精度,进而精准全面的反映大气颗粒物分布,保证大气污染的有效防治的技术效果。
5.鉴于上述问题,本发明提供了一种基于激光雷达的大气颗粒物检测方法及系统。
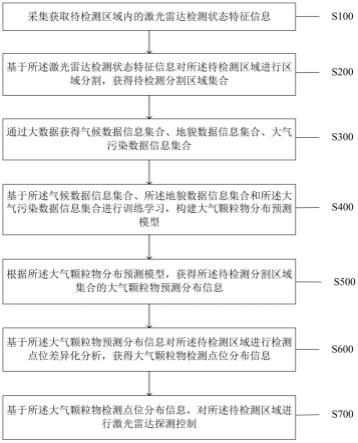
6.第一方面,本技术提供了一种基于激光雷达的大气颗粒物检测方法,所述方法包括:采集获取待检测区域内的激光雷达检测状态特征信息;基于所述激光雷达检测状态特征信息对所述待检测区域进行区域分割,获得待检测分割区域集合;通过大数据获得气候数据信息集合、地貌数据信息集合、大气污染数据信息集合;基于所述气候数据信息集合、所述地貌数据信息集合和所述大气污染数据信息集合进行训练学习,构建大气颗粒物分布预测模型;根据所述大气颗粒物分布预测模型,获得所述待检测分割区域集合的大气颗粒物预测分布信息;基于所述大气颗粒物预测分布信息对所述待检测区域进行检测点位差异化分析,获得大气颗粒物检测点位分布信息;基于所述大气颗粒物检测点位分布信息,对所述待检测区域进行激光雷达探测控制。
7.另一方面,本技术还提供了一种基于激光雷达的大气颗粒物检测系统,所述系统包括:信息采集模块,用于采集获取待检测区域内的激光雷达检测状态特征信息;区域分割模块,用于基于所述激光雷达检测状态特征信息对所述待检测区域进行区域分割,获得待检测分割区域集合;信息获取模块,用于通过大数据获得气候数据信息集合、地貌数据信息集合、大气污染数据信息集合;模型构建模块,用于基于所述气候数据信息集合、所述地貌数据信息集合和所述大气污染数据信息集合进行训练学习,构建大气颗粒物分布预测模型;预测分布模块,用于根据所述大气颗粒物分布预测模型,获得所述待检测分割区域集合
的大气颗粒物预测分布信息;检测点位分布模块,用于基于所述大气颗粒物预测分布信息对所述待检测区域进行检测点位差异化分析,获得大气颗粒物检测点位分布信息;探测控制模块,用于基于所述大气颗粒物检测点位分布信息,对所述待检测区域进行激光雷达探测控制。
8.本技术中提供的一个或多个技术方案,至少具有如下技术效果或优点:
9.由于采用了基于采集获取的激光雷达检测状态特征信息对待检测区域进行区域分割,获得待检测分割区域集合,再基于大数据获得的气候数据信息集合、地貌数据信息集合和大气污染数据信息集合进行训练学习,构建大气颗粒物分布预测模型,根据所述大气颗粒物分布预测模型,获得待检测分割区域集合的大气颗粒物预测分布信息,最后基于大气颗粒物预测分布信息对待检测区域进行检测点位差异化分析,获得大气颗粒物检测点位分布信息,基于所述大气颗粒物检测点位分布信息,对所述待检测区域进行激光雷达探测控制的技术方案。进而达到了通过对大气颗粒物分布情况进行预测,确定激光雷达监测点位分布,对大气颗粒物检测更加全面准确,提高测量精度,进而精准全面的反映大气颗粒物分布,保证大气污染的有效防治的技术效果。
附图说明
10.图1为本技术一种基于激光雷达的大气颗粒物检测方法的流程示意图;
11.图2为本技术一种基于激光雷达的大气颗粒物检测方法中获得待检测分割区域集合的流程示意图;
12.图3为本技术一种基于激光雷达的大气颗粒物检测方法中获得探测分类特征信息的流程示意图;
13.图4为本技术一种基于激光雷达的大气颗粒物检测系统的结构示意图;
14.附图标记说明:信息采集模块11,区域分割模块12,信息获取模块13,模型构建模块14,预测分布模块15,检测点位分布模块16,探测控制模块17。
具体实施方式
15.本技术通过提供了一种基于激光雷达的大气颗粒物检测方法系统,解决了现有技术对大气颗粒物检测不全面,测量精度不高,导致无法全面反映大气颗粒物分布的技术问题,达到了通过对大气颗粒物分布情况进行预测,确定激光雷达监测点位分布,对大气颗粒物检测更加全面准确,提高测量精度,进而精准全面的反映大气颗粒物分布,保证大气污染的有效防治的技术效果。
16.实施例一
17.如图1所示,本技术提供了一种基于激光雷达的大气颗粒物检测方法,所述方法包括:
18.步骤s100:采集获取待检测区域内的激光雷达检测状态特征信息;
19.具体而言,随着社会经济的快速发展,各种环境问题也层出不穷,其中,大气污染,尤其是颗粒物污染具有广泛的空间分布,对人体健康和空气质量产生了较大的危害。大气颗粒物是大气中存在的各种固态和液态颗粒状物质的总称,平常所见到的灰尘、熏烟、烟、雾、霾等都属于气溶胶的范畴。因此,大气颗粒物的准确检测对空气环境质量和大气污染防
治有着重要的现实意义。
20.通过激光雷达对待检测区域内的大气颗粒物进行检测,激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统,具有分辨率高、隐蔽性好、抗有源干扰能力强、探测性能好的优点。对激光雷达检测状态特征信息进行采集,包括探测距离、探测湿度、探测温度、探测气压等特征信息。
21.步骤s200:基于所述激光雷达检测状态特征信息对所述待检测区域进行区域分割,获得待检测分割区域集合;
22.如图2所示,进一步而言,所述基于所述激光雷达检测状态特征信息对所述待检测区域进行区域分割,获得待检测分割区域集合,本技术步骤s200还包括:
23.步骤s210:所述激光雷达检测状态特征信息包括探测距离、探测湿度、探测温度、探测气压;
24.步骤s220:获得所述待检测区域的三维地图信息,对所述三维地图信息进行网格划分;
25.步骤s230:基于所述探测距离对网格划分后的所述三维地图信息进行初步分割,获得初步分割区域信息;
26.步骤s240:对所述探测湿度、所述探测温度和所述探测气压进行分类,获得探测分类特征信息;
27.步骤s250:基于所述探测分类特征信息对所述初步分割区域信息进行二次区域分割,获得所述待检测分割区域集合。
28.如图3所示,进一步而言,所述对所述探测湿度、所述探测温度和所述探测气压进行分类,获得探测分类特征信息,本技术步骤s240还包括:
29.步骤s241:构建检测状态特征标签库,所述检测状态特征标签库包括检测状态和状态等级标签;
30.步骤s242:根据所述检测状态特征标签库,对所述探测湿度、所述探测温度和所述探测气压进行分类,获得探测湿度分类标签、探测温度分类标签和探测气压分类标签;
31.步骤s243:对所述探测湿度分类标签、所述探测温度分类标签和所述探测气压分类标签进行标签融合,获得融合标签信息;
32.步骤s244:基于所述融合标签信息,确定所述探测分类特征信息。
33.具体而言,基于所述激光雷达检测状态特征信息对所述待检测区域进行区域分割,所述激光雷达检测状态特征信息包括探测距离、探测湿度、探测温度、探测气压。首先可通过大数据构建所述待检测区域的三维地图信息,并对所述三维地图信息进行网格划分,将所述待检测区域划分为数个区域网格,利于后续区域分割。基于所述探测距离对网格划分后的所述三维地图信息进行初步分割,确保激光雷达可以对待检测区域进行全面探测覆盖,得到初步分割区域信息。
34.再对所述探测湿度、所述探测温度和所述探测气压进行分类,具体为首先构建检测状态特征标签库,所述检测状态特征标签库包括激光雷达的检测状态和检测状态等级标签。根据所述检测状态特征标签库,对所述探测湿度、所述探测温度和所述探测气压进行分类,获得对应的探测湿度分类标签、探测温度分类标签和探测气压分类标签,示例性的,高湿度探测标签、高温度探测标签、低气压探测标签。对所述探测湿度分类标签、所述探测温
度分类标签和所述探测气压分类标签进行标签融合,获得融合后标签信息,即探测湿度、探测温度和探测气压的融合标签信息。
35.基于所述融合标签信息,确定探测分类特征信息,所述探测分类特征信息用于表明激光雷达的探测状态。基于所述探测分类特征信息对所述初步分割区域信息进行二次区域分割,即按照激光雷达的探测特征进行相同探测区域的二次详细归类,示例性的,可以将相同等级检测状态的初步分割区域进行小分类归类,获得二次区域分割后的所述待检测分割区域集合。通过激光雷达检测状态特征对所述待检测区域进行区域分割,提高区域分割准确性和合理性,确保激光雷达对待检测区域的全面覆盖探测,提高探测结果精度。
36.步骤s300:通过大数据获得气候数据信息集合、地貌数据信息集合、大气污染数据信息集合;
37.具体而言,通过大数据获得激光雷达探测区域的历史气候数据信息集合、地貌数据信息集合、大气污染数据信息集合,上述历史气候数据、地貌数据、大气污染数据是影响大气颗粒物分布的重要因素,通过大数据采集使得数据获取更加海量有效,进而保证后续预测模型训练样本的数据量和训练准确性。
38.步骤s400:基于所述气候数据信息集合、所述地貌数据信息集合和所述大气污染数据信息集合进行训练学习,构建大气颗粒物分布预测模型;
39.进一步而言,所述基于所述气候数据信息集合、所述地貌数据信息集合和所述大气污染数据信息集合进行训练学习,构建大气颗粒物分布预测模型,本技术步骤s400还包括:
40.步骤s410:将所述气候数据信息集合、所述地貌数据信息集合和所述大气污染数据信息集合作为模型样本信息进行标识;
41.步骤s420:对标识后的所述模型样本信息按照预定比例进行划分,获得训练集、验证集和测试集;
42.步骤s430:基于所述训练集对深度学习网络模型进行监督训练,获得基础颗粒物分布预测模型;
43.步骤s440:基于所述验证集和所述测试集对所述基础颗粒物分布预测模型进行验证和测试,直到模型预测准确率达到预设准确率,获得所述大气颗粒物分布预测模型。
44.进一步而言,所述基于所述训练集对深度学习网络模型进行监督训练,获得基础颗粒物分布预测模型,本技术步骤s430还包括:
45.步骤s431:基于所述训练集对深度学习网络模型进行监督训练,获得颗粒物分布浓度预测半模型;
46.步骤s432:根据所述训练集对深度学习网络模型进行监督训练,获得颗粒物分布趋势预测半模型;
47.步骤s433:将所述颗粒物分布浓度预测半模型和所述颗粒物分布趋势预测半模型进行合并,生成所述基础颗粒物分布预测模型。
48.具体而言,基于所述气候数据信息集合、所述地貌数据信息集合和所述大气污染数据信息集合进行模型训练学习,首先将所述气候数据信息集合、所述地貌数据信息集合和所述大气污染数据信息集合作为模型样本信息进行标识,对标识后的所述模型样本信息按照预定比例进行划分,获得训练集、验证集和测试集,示例性的,可按照6:2:2的比例进行
划分获得训练集、验证集和测试集。
49.基于所述训练集对深度学习网络模型进行监督训练,具体过程为先基于所述训练集对深度学习网络模型进行监督训练,获得颗粒物分布浓度预测半模型,用于对大气颗粒物的分布浓度值进行预测。再根据所述训练集对深度学习网络模型进行监督训练,获得颗粒物分布趋势预测半模型,用于对大气颗粒物的分布扩散趋势进行预测。最后将所述颗粒物分布浓度预测半模型和所述颗粒物分布趋势预测半模型进行合并,生成所述基础颗粒物分布预测模型,用于大气颗粒物的分布浓度和分布趋势预测。
50.基于所述验证集和所述测试集对所述基础颗粒物分布预测模型的预测效果进行验证和测试,直到模型预测准确率达到预设准确率,表明模型输出准确性达标,获得所述大气颗粒物分布预测模型。通过对大气颗粒物分布预测模型进行验证构建,保证模型预测准确率,进而提高大气颗粒物分布预测准确性和预测效率。
51.步骤s500:根据所述大气颗粒物分布预测模型,获得所述待检测分割区域集合的大气颗粒物预测分布信息;
52.步骤s600:基于所述大气颗粒物预测分布信息对所述待检测区域进行检测点位差异化分析,获得大气颗粒物检测点位分布信息;
53.具体而言,根据所述大气颗粒物分布预测模型,对所述待检测分割区域集合中的各分割区域进行大气颗粒物的预测分布,包括大气颗粒物的分布浓度和分布趋势预测。基于模型的输出预测信息即所述大气颗粒物预测分布信息对所述待检测区域进行检测点位差异化分析,即按照大气颗粒物的分布信息进行激光雷达的检测点位确定,获得对应的激光雷达的大气颗粒物检测点位分布信息,保证对待检测区域的大气颗粒物进行全面检测覆盖。
54.步骤s700:基于所述大气颗粒物检测点位分布信息,对所述待检测区域进行激光雷达探测控制。
55.进一步而言,所述基于所述大气颗粒物检测点位分布信息,对所述待检测区域进行激光雷达探测控制,本技术步骤s700还包括:
56.步骤s710:基于所述大气颗粒物检测点位分布信息,获得垂直大气颗粒物探测分布信息和水平大气颗粒物探测分布信息;
57.步骤s720:按照所述垂直大气颗粒物探测分布信息和所述水平大气颗粒物探测分布信息,确定激光雷达协同探测点位信息;
58.步骤s730:基于所述激光雷达协同探测点位信息发射激光脉冲,获得回波信号采集信息;
59.步骤s740:对所述回波信号采集信息进行反演,获得大气颗粒物探测分布信息。
60.进一步而言,本技术步骤s740还包括:
61.步骤s741:对所述大气颗粒物探测分布信息进行空气质量评价,获得空气质量评价系数;
62.步骤s742:当所述空气质量评价系数低于预设空气质量系数时,发出预警指令进行空气质量预警;
63.步骤s743:基于所述预警指令和所述大气颗粒物探测分布信息,确定大气污染溯源信息;
64.步骤s744:基于所述大气污染溯源信息,对所述待检测区域进行大气污染管控。
65.具体而言,基于所述大气颗粒物检测点位分布信息,对所述待检测区域进行激光雷达探测控制。具体为基于所述大气颗粒物检测点位分布信息,分别获得垂直大气颗粒物探测分布信息和水平大气颗粒物探测分布信息。垂直探测可以确定探测地点上空的大气颗粒物垂直分布和运动,水平探测可用于识别该区域的大气颗粒物水平分布,同时结合垂直探测和水平探测,可以实现区域探测的三维数据获取,从而对大气颗粒物探测更加全面准确。
66.按照所述垂直大气颗粒物探测分布信息和所述水平大气颗粒物探测分布信息,确定激光雷达协同探测点位信息,实现多台雷达协同运行,提高激光雷达点位布局合理性。基于所述激光雷达协同探测点位信息发射激光脉冲,激光束与大气颗粒物发生相互作用,产生回波信号,对回波信号进行采集。再对采集的所述回波信号采集信息进行反演,可采用fernald算法进行信号反演,得到大气颗粒物的消光系数和退偏振度系数空间分布等大气颗粒物光学特征参数,进而确定大气颗粒物探测分布信息,包括大气颗粒物分布浓度、分布类型、分布趋势等,探测结果更加准确全面。
67.对所述大气颗粒物探测分布信息进行空气质量评价,确定空气质量评价系数,空气质量评价系数越大,大气颗粒物浓度越低,空气质量越好。当所述空气质量评价系数低于预设空气质量系数时,表明空气质量较差,不达标,发出预警指令进行空气质量预警。同时基于所述预警指令和所述大气颗粒物探测分布信息,确定大气污染溯源信息,即对该区域的大气污染产生源头进行分析追溯,例如工业企业、锅炉、交通运输排气排放等。
68.基于所述大气污染溯源信息,对所述待检测区域进行大气污染管控,即制定方案对大气污染排放源进行管控,例如工业废气净化、机动车尾气排放控制、空气污染物净化等措施。达到对大气颗粒物检测更加全面准确,提高测量精度,进而精准全面的反映大气颗粒物分布,保证大气污染的有效防治的技术效果。
69.综上所述,本技术所提供的一种基于激光雷达的大气颗粒物检测方法及系统具有如下技术效果:
70.由于采用了基于采集获取的激光雷达检测状态特征信息对待检测区域进行区域分割,获得待检测分割区域集合,再基于大数据获得的气候数据信息集合、地貌数据信息集合和大气污染数据信息集合进行训练学习,构建大气颗粒物分布预测模型,根据所述大气颗粒物分布预测模型,获得待检测分割区域集合的大气颗粒物预测分布信息,最后基于大气颗粒物预测分布信息对待检测区域进行检测点位差异化分析,获得大气颗粒物检测点位分布信息,基于所述大气颗粒物检测点位分布信息,对所述待检测区域进行激光雷达探测控制的技术方案。进而达到了通过对大气颗粒物分布情况进行预测,确定激光雷达监测点位分布,对大气颗粒物检测更加全面准确,提高测量精度,进而精准全面的反映大气颗粒物分布,保证大气污染的有效防治的技术效果。
71.实施例二
72.基于与前述实施例中一种基于激光雷达的大气颗粒物检测方法同样发明构思,本发明还提供了一种基于激光雷达的大气颗粒物检测系统,如图4所示,所述系统包括:
73.信息采集模块11,用于采集获取待检测区域内的激光雷达检测状态特征信息;
74.区域分割模块12,用于基于所述激光雷达检测状态特征信息对所述待检测区域进
行区域分割,获得待检测分割区域集合;
75.信息获取模块13,用于通过大数据获得气候数据信息集合、地貌数据信息集合、大气污染数据信息集合;
76.模型构建模块14,用于基于所述气候数据信息集合、所述地貌数据信息集合和所述大气污染数据信息集合进行训练学习,构建大气颗粒物分布预测模型;
77.预测分布模块15,用于根据所述大气颗粒物分布预测模型,获得所述待检测分割区域集合的大气颗粒物预测分布信息;
78.检测点位分布模块16,用于基于所述大气颗粒物预测分布信息对所述待检测区域进行检测点位差异化分析,获得大气颗粒物检测点位分布信息;
79.探测控制模块17,用于基于所述大气颗粒物检测点位分布信息,对所述待检测区域进行激光雷达探测控制。
80.进一步的,所述区域分割模块还包括:
81.检测状态特征单元,用于所述激光雷达检测状态特征信息包括探测距离、探测湿度、探测温度、探测气压;
82.网格划分单元,用于获得所述待检测区域的三维地图信息,对所述三维地图信息进行网格划分;
83.初步分割单元,用于基于所述探测距离对网格划分后的所述三维地图信息进行初步分割,获得初步分割区域信息;
84.特征分类单元,用于对所述探测湿度、所述探测温度和所述探测气压进行分类,获得探测分类特征信息;
85.区域分割单元,用于基于所述探测分类特征信息对所述初步分割区域信息进行二次区域分割,获得所述待检测分割区域集合。
86.进一步的,所述特征分类单元还包括:
87.标签库构建单元,用于构建检测状态特征标签库,所述检测状态特征标签库包括检测状态和状态等级标签;
88.标签分类单元,用于根据所述检测状态特征标签库,对所述探测湿度、所述探测温度和所述探测气压进行分类,获得探测湿度分类标签、探测温度分类标签和探测气压分类标签;
89.标签融合单元,用于对所述探测湿度分类标签、所述探测温度分类标签和所述探测气压分类标签进行标签融合,获得融合标签信息;
90.特征确定单元,用于基于所述融合标签信息,确定所述探测分类特征信息。
91.进一步的,所述模型构建模块还包括:
92.样本标识单元,用于将所述气候数据信息集合、所述地貌数据信息集合和所述大气污染数据信息集合作为模型样本信息进行标识;
93.样本划分单元,用于对标识后的所述模型样本信息按照预定比例进行划分,获得训练集、验证集和测试集;
94.模型训练单元,用于基于所述训练集对深度学习网络模型进行监督训练,获得基础颗粒物分布预测模型;
95.模型获得单元,用于基于所述验证集和所述测试集对所述基础颗粒物分布预测模
型进行验证和测试,直到模型预测准确率达到预设准确率,获得所述大气颗粒物分布预测模型。
96.进一步的,所述模型训练单元还包括:
97.半模型获得单元,用于基于所述训练集对深度学习网络模型进行监督训练,获得颗粒物分布浓度预测半模型;
98.半模型构建单元,用于根据所述训练集对深度学习网络模型进行监督训练,获得颗粒物分布趋势预测半模型;
99.模型生成单元,用于将所述颗粒物分布浓度预测半模型和所述颗粒物分布趋势预测半模型进行合并,生成所述基础颗粒物分布预测模型。
100.进一步的,所述探测控制模块还包括:
101.点位分布单元,用于基于所述大气颗粒物检测点位分布信息,获得垂直大气颗粒物探测分布信息和水平大气颗粒物探测分布信息;
102.点位确定单元,用于按照所述垂直大气颗粒物探测分布信息和所述水平大气颗粒物探测分布信息,确定激光雷达协同探测点位信息;
103.信号采集单元,用于基于所述激光雷达协同探测点位信息发射激光脉冲,获得回波信号采集信息;
104.信号反演单元,用于对所述回波信号采集信息进行反演,获得大气颗粒物探测分布信息。
105.进一步的,所述系统还包括:
106.空气质量评价单元,用于对所述大气颗粒物探测分布信息进行空气质量评价,获得空气质量评价系数;
107.空气质量预警单元,用于当所述空气质量评价系数低于预设空气质量系数时,发出预警指令进行空气质量预警;
108.大气污染溯源单元,用于基于所述预警指令和所述大气颗粒物探测分布信息,确定大气污染溯源信息;
109.大气污染管控单元,用于基于所述大气污染溯源信息,对所述待检测区域进行大气污染管控。
110.本技术提供了一种基于激光雷达的大气颗粒物检测方法,所述方法包括采集获取待检测区域内的激光雷达检测状态特征信息;基于所述激光雷达检测状态特征信息对所述待检测区域进行区域分割,获得待检测分割区域集合;通过大数据获得气候数据信息集合、地貌数据信息集合、大气污染数据信息集合;基于所述气候数据信息集合、所述地貌数据信息集合和所述大气污染数据信息集合进行训练学习,构建大气颗粒物分布预测模型;根据所述大气颗粒物分布预测模型,获得所述待检测分割区域集合的大气颗粒物预测分布信息;基于所述大气颗粒物预测分布信息对所述待检测区域进行检测点位差异化分析,获得大气颗粒物检测点位分布信息;基于所述大气颗粒物检测点位分布信息,对所述待检测区域进行激光雷达探测控制。解决了现有技术对大气颗粒物检测不全面,测量精度不高,导致无法全面反映大气颗粒物分布的技术问题。达到通过对大气颗粒物分布情况进行预测,确定激光雷达监测点位分布,对大气颗粒物检测更加全面准确,提高测量精度,进而精准全面的反映大气颗粒物分布,保证大气污染的有效防治的技术效果。
111.本说明书和附图仅仅是本技术的示例性说明,如果本发明的修改和变型属于本发明及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
